Вимоги безпеки перед початком роботи 2 страница
(6.11)
Елементарні механізми коробок подач мають те саме призначення, що й елементарні механізми коробок швидкостей.
У коробках подач широко використовують описані вище механізми коробок швидкостей, а окрім них — механізм Нортона та механізм з висувною шпонкою.
Механізм Нортона складається із зубчастих коліс z1, z2 ..., z7 (рис. 6.3, а), закріплених на валіІ, пересувного колеса zп , що рухається на шлицях уздовж вала II і накидного колеса zн , яке утримується в постійному зчепленні з колесом zп за допомогою рамки 1 і осі III та підшипників.
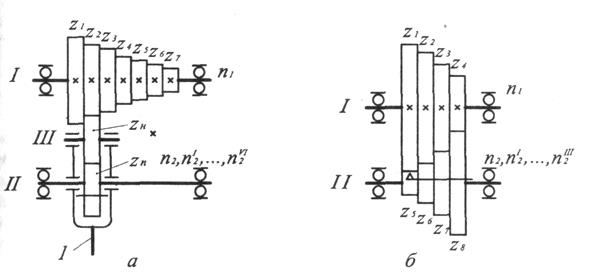
Рис. 6.3. Елементарні механізми коробок подач:
механізм Нортона (а) і механізм з висувною шпонкою (б);1 — рамка; тяговий І і ведений II вали; III - вісь; п1 - частота обертання тягового вала;
z1, z2 ..., z8 , zн , zп - кількість зубців зубчастого колеса;
n2,,  ,
,  ,
,  ,
,  ,
,  ,
,  - частота обертання веденого вала
- частота обертання веденого вала
Колеса zп і zн разом з рамкою можуть повертатись довкола вала II, що в поєднанні з пересуванням уздовж вала забезпечує почергово зчеплення колеса zн з кожним колесом вала І. Внаслідок цього на вал II буде передано стільки частот обертання, скільки зубчастих коліс є на валі І:
 ...;
...;  .
.
(6.12)
Механізм з висувною шпонкою має закріплені на валі І (рис. 6.3, б) колеса z1, z2, z3, z4 і вільнопосаджені на валі II колеса z5, z6, z7, z8, а також підшипники. Вал II порожнистий, в його пазі пересувається шпонка, призначена для почергового закріплювання одного з коліс z5, z6, z7, z8 на валі II. У нашому випадку ведений вал отримає чотири частоти обертання:
n2 =  =
=  ; =
; =  ; =
; =  (6.13)
(6.13)
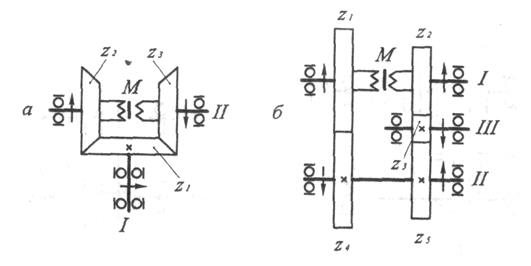
Рис. 6.4. Механізми реверсу:
з конічних зубчастих коліс і муфти (а) та з циліндричних зубчастих коліс і муфти (б); тяговий І і ведений II вали;z1,z2,..., z5. — кількість зубців зубчастого колеса; М - кулачкова муфта
Механізмреверсу забезпечує на веденому валі два протилежні напрямки обертання за наявного одного напрямку обертання на тяговому валі.
Розглянемо два механізми реверсу - з конічних зубчастих коліс і муфти та з циліндричних зубчастих коліс і муфти.
Механізм реверсу з конічних зубчастих коліс і муфти складається з тягового вала І (рис. 6.4, а), закріпленого на ньому колеса z1, веденого вала II з двома вільнопосадженими колесами z2, z3, двобічної кулачкової муфти М та підшипників. При нейтральному положенні муфти й обертанні вала І колеса вала II обертаються у протилежних напрямках. Закріпивши муфтою одне з коліс z2 або z3 на валі II, цьому валові надають того або іншого напрямку обертання, показаного стрілками.
Механізм реверсу з циліндричних зубчастих коліс і муфти має на валі І (рис. 6.4, б) два вільнопосаджених колеса z1,z2муфту М між ними. На валі II закріплено колеса z4,z5, на валі III є колесо z3. Закріпивши муфтою М колесо z1, на вал II можна передати рух колесами z1 і z4 і він буде обертатись в інший бік, аніж вал І. Закріпивши колесо z2, надамо валові II напрямку обертання, що співпадає з напрямком обертання вала І, через колеса z2, z3 і z5.
Ряди частот обертання шпинделів, подвійних ходів та подач у верстатах.
1. Поняття про знаменник геометричного ряду частот обертання і подач. Діапазон регулювання та число ступенів передач.
У верстатів з обертальним головним рухом частота обертання шпинделя, хв -1
п = 1000v / π d, (7.1)
де V - швидкість різання, м / хв; d - діаметр оброблюваної заготовки або інструменту, мм.
Для отримання найвигідніших умов при обробці заготовок з різних матеріалів інструментами з різними ріжучими властивостями верстати повинні забезпечувати зміну швидкостей різання від v min до v mах . Так як у процесі заготовки або встановлювані на верстаті інструменти можуть мати діаметри в межах від dmin до d mах, необхідно мати можливість встановлювати різну частоту обертання шпинделя в межах від n minдо n max:
nmin= 1000 vmin/πd mах;
nmax= 1000 vmax/πd min.
Відношення максимальної частоти обертання шпинделя верстата до мінімальної називають діапазоном регулювання частоти обертання шпинделя:
nmax/ nmin=D.
Діапазон регулювання шпинделя характеризує експлуатаційні можливості верстата. У зазначених межах можна отримати будь-яке значення п, якщо мати механізм безступінчатого регулювання швидкості головного руху. У цьому випадку можна встановити частоту обертання, відповідну вибраної найвигіднішою швидкості різання при заданому діаметрі. Однак безступінчатий приводи, незважаючи на їх досить значного поширення в сучасних верстатах, застосовують не так широко, як приводи із ступінчастим рядом частоти обертання шпинделя. Більшість верстатів має ступінчасті ряди частот обертання. У цьому випадку замість частоти обертання, точно найвигіднішою швидкості різання при даному діаметрі, доводиться брати найближчу меншу частоту. Цій дійсній частоті п д буде відповідати дійсна швидкість різання v д = πdn д / 1000, що менше розрахункової на величину V – Vд. Тоді відносна втрата швидкості різання при переході з однієї частоти обертання до найближчої меншої
A=(v-vд)/v=(πdn- πdnд)/ πdn=(n-nд)/n. (7.2)
Отже, відносна втрата швидкості різання буде тим менша, чим менша різниця п - п д.
В інтервалі між граничними значеннями частоти обертання п тах і nmin проміжні частоти можна розмістити по різних рядах. Однак не всі можливі ряди будуть рівноцінними. Найбільш раціональним для застосування в верстатобудуванні є геометричний ряд, в якому кожна наступна частота відрізняється від попередньої в φ раз (де φ - знаменник ряду).
Головною перевагою геометричного ряду є те, що максимальна відносна втрата швидкості різання залишається однаковою для всіх інтервалів ряду частоти обертання. Це дозволяє забезпечити постійність максимальної відносної втрати продуктивності формоутворення верстата, тобто дає економічні переваги в порівнянні з іншими рядами. Продуктивність формоутворення визначається площею поверхні, що обробляється на верстаті в одиницю часу.
Геометричний ряд частот обертання шпинделя зі знаменником φ буде мати такий вигляд:
n1= nmin; (7.3)
n2 =n1φ;
n3= n2φ;
……..
nz =nz-1φ=n1φz-1.
2. Стандартні значення знаменника геометричного ряду, застосовані в металорізальних верстатах.
Значення знаменників рядів φ нормалізовані. Це дозволяє нормалізувати ряди частот обертання і подач, а також полегшити кінематичний розрахунок верстатів. Значення знаменників φ нормальних рядів частот обертання шпинделів верстатів встановлені з урахуванням наступних міркувань.
1. У приводі головного руху верстатів часто застосовують багато прискорені електродвигуни трифазного струму з відношенням частот обертання, рівним 2. Для того щоб частоти обертання шпинделя, одержувані при різних частотах таких електродвигунів, були членами геометричного ряду, необхідно мати
φ=  , (7.4)
, (7.4)
де Е1 - ціле число.
2. Обов'язково має бути врахований державний стандарт бажаних чисел і рядів переважних чисел. Ряди бажаних чисел побудовані у вигляді геометричних прогресій, знаменники яких повинні задовольняти вимогу
φ=  ,
,
де Е 2 - ціле число.
Таким чином, стандартні значення знаменника φ рядів
частоти обертання можуть бути знайдені з умови φ= = . Отже Е1=3Е́' і Е2=10 Е́' , де Е '- довільне ціле число.
Для передбачених стандартом чотирьох значень Е 2 == 40; 20; 10 і 5, яким відповідають Е '= Е 2 / 10 = 4; 2; 1 і 0,5 і Е1 = ЗЕ' = 12; 6; 3 і 1,5, отримують наступні значення φ:
φ40=  φ20=
φ20= 
φ10=  φ5=
φ5= 
Для практичного застосування зазначених чотирьох значень
виявилося недостатньо. Тому додані φ=  φ=
φ= 
Внаслідок того, що знаменник φ пов'язаний з числом 2, через певну кількість членів ряду кожне число збільшується в 2 рази. Якщо, наприклад, у ряді є число 2, то будуть числа 4, 8, 16 і т. д. Цій закономірності не підвласні ряди з φ=1,58 і φ=1,78.
У зв'язку з тим, що φ пов'язані з числом 10, кожне число ряду збільшується через певну кількість членів ряду в 10 разів. Наприклад, за наявності у ряді числа 2,8 зустрінуться також числа 28, 280, 2800 і т.д. Ця закономірність десяткового повторення чисел не розповсюджується на ряди з φ = 1,41 і φ = 2.
Нижче наведені значення максимальної відносної втрати швидкості різання А mах між двома сусідніми частотами обертання для відповідних значень φ = 1,06; 1,12; 1,26; 1,41; 1,58; 1,78; 2: A mах = 5; 10; 20; 30; 40; 45; 50%.
Amax= ( vz-vz-1)/vz=(nz-nz-1)/nz=1-nz-1/nz=1-n1φz-2/(n1φz-1)=1-1/φ=(φ-1)φ
або
Amax=[(φ-1)/φ]100%. (7.5)
У табл. 7.1. приведені нормальні ряди частот обертання, що застосовуються в верстатобудуванні.
Нормальні ряди частот обертання, що застосовуються в верстатобудуванні
Знаменник ряду φ
Таблиця № 7.1
| 1,06 | 1,12 | 1,26 | (1 .41) | 1,58 | (1.78) | (2) |
| 1,00 | 1,00 | 1,00 | 1,00 | 1,00 | 1,00 | 1,00 |
| 1,06 | ||||||
| 1,12 | 1,12 | |||||
| 1,18 | ||||||
| 1,25 | 1,25 | 1,25 | ||||
| 1,32 | 1,40 | |||||
| 1,40 | 1,40 | |||||
| 1,50 | 1,60 | |||||
| 1,60 | 1,60 | 1,60 | ||||
| 1,70 1,80 | 1,80 | 1,80 | ||||
| 1,90 2,00 | 2,00 | 2,00 | 2,00 | 2,00 | ||
| 2,12 | ||||||
| 2,24 | 2,24 | |||||
| 2,36 | 2,50 | |||||
| 2,50 | 2,50 | 2,50 | ||||
| 2,65 | ||||||
| 2,80 | 2,80 | 2,80 | ||||
| 3,00 | 3,15 | |||||
| 3,15 | 3,15 | 3,15 | ||||
| 3,35 | ||||||
| 3,55 | 3,55 | |||||
| 3,75 4,00 | 4,00 | 4,00 | 4,00 | 4,00 | 4,00 | |
| 4,25 | ||||||
| 4,50 | 4,50 | |||||
| 4,75 | ||||||
| 5,00 | 5,00 | 5,00 | ||||
| 5,30 5,60 | 5,60 | 5,60 | 5,60 | |||
| 6,00 | 6,30 | |||||
| 6,30 | 6,30 | 6,30 | ||||
| 6,70 | ||||||
| 7,10 | 7,10 | |||||
| 7,50 8,00 | 8,00 | 8,00 | 8,00 | 8,00 | ||
| 8,50 | ||||||
| 9,00 | 9,00 | |||||
| 9,50 | 10,0 | |||||
| 10,00 | 10,00 | 10,00 | 10,00 | |||
| 10,6 | ||||||
| 11,2 | 11,2 | 11,2 | ||||
| 11,8 | ||||||
| 12,5 | 12,5 | 12,5 | ||||
| 13,2 | ||||||
| 14,00 | 14,00 | |||||
| 15,0 16,0 | 16,0 | 16,0 | 16,0 | 16,0 | 16,0 | |
| 17,0. 18,0 | 18,0 | 18,0 |
Знаменник ряду φ
| 1,06 | 1,12 | 1,26 | (1,41) | 1,58 | (1,78) | (2) |
| 19,0 | ||||||
| 20,0 | 20,0 | 20,0 | ||||
| 21,2 | ||||||
| 22,4 | 22,4 | 22,4 | ||||
| 23,6 | ||||||
| 25,0 26,5 | 25,0 | 25,0 | 25,0 | |||
| 28,0 | 28,0 | |||||
| 30,0 | ||||||
| 31,5 | 31,5 | 31,5 | 31,5 | |||
| 33,5 | ||||||
| 35,5 | 35,5 | |||||
| 37,5 | ||||||
| 40,0 42,5 | 40,0 | 40,0 | 40,0 | |||
| 45,0 | 45,0 | 45,0 | ||||
| 47,5 | ||||||
| 50,0 | 50,0 | 50,0 | ||||
| 53,0 | ||||||
| 56,0 60,0 | 56,0 | 56,0 | ||||
| 63,0 67,0 | 63,0 | 63,0 | 63,0 | 63,0 | 63,0 | |
| 71,0 | 71,0 | |||||
| 75,0 | ||||||
| 80,0 | 80,0 | 80,0 | ||||
| 85,0 | ||||||
| 90,0 | 90,0 | 90,0 | ||||
| 95,0 | ||||||
| 100 106 | ||||||
| 125 132 | ||||||
| 160 170 | ||||||
| 180 190 | 1 £ 0 | |||||
| 250 265 | ||||||
Знаменник ряду φ
| 1,06 | 1,12 | 1,26 | (1,41) | 1,58 | (1,78) | (2) |
Примітка: I. ОСТ поширюються на ряди частот обертання, подач, потужностей та інших параметрів верстатів. 2. Ряди частот обертання більше 1000 і менше 1 отримують множенням або діленням табличних значень на 1000. 3. Ряди з знаменниками φ, укладених в дужки, по можливості застосовувати тільки для частот обертання і подач. 4. Допускається складання похідних рядів з нормальних шляхом пропуску деяких частот (наприклад, ряд 132, 190, 265, 375, 530 і т.д.). 5. Частота обертання вала не повинна Відхилятися від табличних значень більш ніж на ± 10 (φ - 1)%. Крім того, і приводі асинхронного електродвигуна допускається зміщення ряду частот обертання у бік зменшення до 5% від частот ряду, підрахованих по синхронній частоті обертання.
Дата добавления: 2015-04-19; просмотров: 1818;