на колесах ПА
Тягово-скоростные свойства ПА характеризуют его возможности к движению под действием продольных (тяговых) сил ведущих колес. Она включает тяговые свойства, позволяющие ПА преодолевать подъемы, буксировать прицепы и скоростные свойства, позволяющие ему двигаться с высокими скоростями, совершать разгон (приемистость) и двигаться по инерции (выбег).
Специфика эксплуатации и движения ПА обуславливает выделение для оценки его тягово-скоростных свойств четыре показателя:
максимальную скорость vmax;
максимальный подъем, преодолеваемый на первой передаче, с постоянной скоростью (угол αmax);
время разгона до заданной скорости tυ;
минимальную устойчивую скорость υmin.
Перечисленные показатели определяются аналитически или экспериментально. Аналитическое их определение осуществляется решением дифференциального уравнения движения ПА. К сожалению, оно справедливо только для частного случая – прямолинейного движения в профиле и в плане дороги (рис.6.14). В системе отсчета 0xyz оно имеет вид
 , (6.17)
, (6.17)
где G – масса ПА, кг; δ > 1 - коэффициент учета вращающихся масс (колес, деталей трансмиссии) ПА; Рк – суммарная тяговая сила, которую обеспечивает двигатель на ведущих колесах ПА, Н; ΡΣ – суммарная сила сопротивления движению, Н.
На рис.6.14 цифры 1,2 и 3,4 обозначают действующие силы опорных реакций R, указывающие, что они относятся к левому и правому колесам передней и задней осей, соответственно.
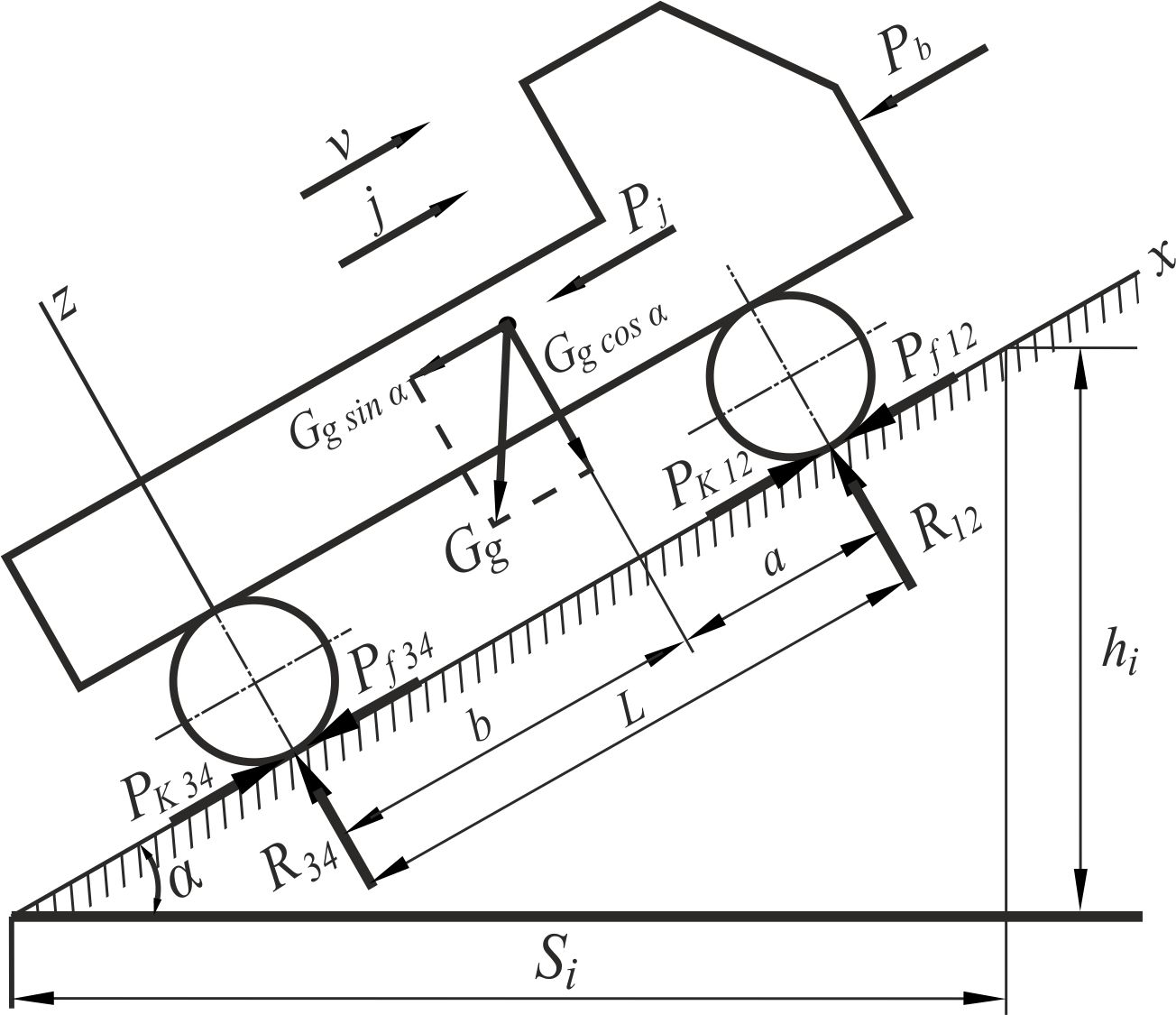
Рис. 6.14. Силы действующие на ПА
Суммарная сила сопротивления движению ΡΣ определяется как сумма всех сопротивлений, действующих на ПА.
ΡΣ=Pf+Pi+Pв+ Рј , Н (6.18)
Рf – сила сопротивления качению колес, Н; Рi – сила сопротивления подъему, Н; Рв–сила сопротивления воздуха, Н; Рј – сила инерции, Н.
Суммарная тяговая сила Рк, которую обеспечивает двигатель на ведущих колесах, определяется по формуле
 Н (6.19)
Н (6.19)
где Мк – крутящий момент, подводимый к колесам ПА, Н·м; Мд – крутящий момент, развиваемый двигателем, Н·м; u – передаточное число трансмиссии; η – коэффициент полезного действия трансмиссии; rD – динамический радиус колеса, м.
Коэффициент полезного действия трансмиссии η является произведением КПД ее агрегатов. Для расчетов можно принимать: η = 0,9 – для грузовых двухосных автомобилей с одинарной главной передачей (4´2); η= 0,88 – тоже, но с двойной главной передачей (4´2); η= 0,86 – для автомобилей повышенной проходимости (4´4); η = 0,84 – для грузовых трехосных автомобилей (6´4); η= 0,82 – для грузовых трехосных автомобилей повышенной проходимости (6´6).
Значения rD приводятся в нормативных документах на пневматические шины (ГОСТы) или вычисляются по формуле
 , (6.20)
, (6.20)
где d – диаметр обода, м; λ – 0,89 - 0,9 – радиальная деформация профиля; bш– ширина профиля, м.
для движения ПА необходимо, чтобы тяговая сила на колесах Рк была больше суммарной силы сопротивления движению ПА ΡΣ, то есть необходимо выполнение условия
Рк > ΡΣ (6.21)
Реализация тяговой силы Рк для движения ПА зависит от способности автомобильного колеса, находящегося под воздействием нормальной нагрузки Gg воспринимать или передавать касательные силы при воздействии с дорогой. Ее оценивают силой сцепления шины с дорогой Рφ или коэффициентом сцепления φ.
Определяют φ экспериментально методом блокировки автомобиля с заблокированными колесами. При этом регистрируют силу тяги на крюке буксира и нормальную реакцию на заблокированных колесах.
В зависимости от направления скольжения колеса различают коэффициенты продольного φх и поперечного φу сцепления. Однако они мало различаются и при расчетах обычно пользуются средним значением коэффициента сцепления φ.
Коэффициент φ зависит от типа покрытия и состояния дороги, конструкции и материала шины, давления воздуха в ней, нагрузки на колеса, температурных условий. Однако основными факторами на его величину являются тип и состояние дорожного покрытия и давление в шинах (табл.6.6).
Таблица 6.6
| Дорожное покрытие | Состояние покрытия | Давление в шине | ||
| высокое | низкое | регулируемое | ||
| Асфальт, бетон | Сухое Мокрое | 0,5–0,7 0,35–0,45 | 0,7–0,8 0,45–0,55 | 0,7–0,8 0,5–0,6 |
| Щебеночное | Сухое Мокрое | 0,5–0,6 0,3–0,4 | 0,6–0,7 0,4–0,5 | 0,6–0,7 0,4–0,55 |
| Грунтовое (кроме суглинка) | Сухое Увлажненное Мокрое | 0,4–0,5 0,2–0,4 0,15–0,25 | 0,5–0,6 0,3–0,45 0,25–0,35 | 0,5–0,6 0,35–0,5 0,2–0,3 |
| Песок | Сухое Влажное | 0,2–0,3 0,35–0,4 | 0,22–0,4 0,4–0,5 | 0,2–0,3 0,4–0,5 |
| Суглинок | Сухое В пластическом состоянии | 0,4–0,5 0,2–0,4 | 0,4–0,55 0,25–0,4 | 0,4–0,5 0,3–0,45 |
| Снег | Рыхлое Укатанное | 0,2–0,3 0,15–0,2 | 0,2–0,4 0,2–0,25 | 0,2–0,4 0,3–0,45 |
| Любое | Обледенелое | 0,08–0,15 | 0,1–0,2 | 0,05–0,1 |
Максимальная сила тяги Рφ полноприводных ПА определяют по формуле
Рφ = φ Gg (6.22)
где G – масса ПА, кг.
В случае неполноприводных ПА ее определяют по формуле
Рφ = φ ∑ R34 (6.23)
где R34 – нормальная реакция ведущих колес, Н.
Реализация суммарной тяговой силы, которую обеспечивает двигатель на колесах автомобиля, ограничивается сцеплением колес с дорожным покрытием. Движение ПА без буксования ведущих колес возможно только при условии
 . (6.24)
. (6.24)
С учетом формулы (6.21) можно записать общее условие для движения ПА
ΡΣ <  . (6.25)
. (6.25)
Из анализа уравнения (6.25) следует, что для движения ПА сила тяги на ведущих колесах должна быть больше суммарной силы сопротивления движению ПА. Однако необходимо еще, чтобы сила тяги по сцеплению колес с дорогой (формула 6.22) была больше силы тяги Рк, подводимой к колесам от двигателя (формула 6.19).
Силы сопротивления, действующие на ПА
Сила сопротивления качению колес. Сопротивление качению колеса с пневматической силой по недеформируемой дороге возникает в основном за счет затрат энергии на деформирование шины. При движении автомобиля по деформируемой дороге (пашня, песок, неуплотненный снег) возникает за счет затрат энергии на деформирование грунта (образование колеи) и на преодоление сил трения между колесом и грунтом.
Сила сопротивления качению колес ПА является суммой сил сопротивления качению всех колес. Коэффициент сопротивления качению у ведомых и ведущих колес отличается мало. Поэтому при расчетах движения ПА силу сопротивления качению Рf (см.рис. 6.14) можно вычислять по формуле
Рf = fGgcosα (6.26)
где f – коэффициент сопротивления качению колеса; G – масса ПА, кг; g = 9,81 м/с2 – ускорение свободного падения; α - угол продольного уклона дороги.
Коэффициент сопротивления качению f зависит в основном от типа и состояния дорожного покрытия, конструкции шин, давления в них. Для расчетов его (в пределах скоростей до 80…100 км/ч) считают величиной постоянной, зависящей только от типа и состояния дорожного покрытия (табл.6.7).
Таблица 6.7
| Тип дороги или покрытия | Состояние дороги или покрытия | Значение f |
| Дорога с асфальтобетонным покрытием | Сухая, в хорошем состоянии Сухая, в удовлетворительном состоянии | 0,015–0,018 0,018–0,020 |
| Дорога с гравийным покрытием в хорошем состоянии | Сухая | 0,020–0,025 |
| Булыжное шоссе | Сухое, в хорошем состоянии Сухое, с выбоинами | 0,025–0,030 0,035–0,050 |
| Грунтовая дорога | Сухая, укатанная Влажная (после дождя) В период распутицы | 0,025–0,035 0,050–0,15 0,10–0,25 |
| Песок | Сухой Сырой | 0,10–0,30 0,060–0,150 |
| Суглинистая и глинистая целина | Сухая В пластическом состоянии В текучем состоянии | 0,040–0,060 0,100–0,200 0,20–0,30 |
| Обледенелая дорога или лед | – | 0,015–0,03 |
| Укатанная снежная дорога | – | 0,03–0,05 |
Коэффициент f уменьшается с увеличением размера шины. Увеличения нагрузки на колесо сверх номинальной приводит к увеличению f.
На дорогах с твердым покрытием f уменьшается при увеличении давления воздуха в шинах, меньшие f имеют шины с мелким рисунком протектора.
Сила сопротивления подъему ПА Pi является составляющей силы веса (см.рис.6.1)
Pi = Ggsinα . (6.27)
Вместо α может быть задан уклон i. Уклон представляет собой отношение (см.рис.6.14)
i = h/S = tgα . (6.28)
При малых углах подъема дороги (α < 100) tgα ≈ sinα можно считать, что Pi = Ggi . (6.29)
Сила сопротивления воздуха обусловлена перемещением воздуха и его трение о поверхность ПА.
Сила сопротивления воздуха Рв, определяется по формуле
 , (6.30)
, (6.30)
где F – лобовая площадь, м2; Кв– коэффициент обтекаемости, (Н×с2)/м4;
v – скорость автомобиля, м/с.
Лобовой площадью называют площадь проекции АТС на плоскость, перпендикулярную продольной оси автомобиля. Лобовую площадь можно определить по чертежам общего вида ПА.
При отсутствии точных размеров ПА лобовая площадь вычисляется по формуле
 , (6.31)
, (6.31)
где В – колея, м; Нг – габаритная высота ПА, м.
Коэффициент обтекаемости автомобиля определяется для каждой модели экспериментально, при продувке автомобиля или его модели в аэродинамической трубе. Коэффициент Кв равен силе сопротивления воздуха, создаваемой 1 м2 лобовой площади автомобиля при его движении со скоростью 1 м/с. Для ПА на шасси грузовых автомобилей Кв= 0,5 – 0,6 (Н×с2)/м4, для легковых Кв = 0,2 – 0,35 (Н×с2)/м4, для автобусов Кв = 0,4 – 0,5 (Н×с2/м4.
При прямолинейном движении и отсутствии бокового ветра силу Рвпринято направлять вдоль продольной оси АТС, проходящей через центр масс автомобиля или через геометрический центр лобовой площади.
При v ≤ 40 км/ч сила сопротивления воздуха мала и при расчетах движения ПА на этих скоростях ее можно не учитывать.
Сила инерции автомобилей. В теории инерционные силы и моменты при прямолинейном его движении без колебаний в продольной плоскости принято выражать силой инерции Рj, Н:
 , (6.32)
, (6.32)
где j – ускорение центра масс АТС, м/с2.
Сила инерции направлена параллельно дороге через центр масс АТС в сторону, противоположную ускорению. Для учета увеличения силы инерции из-за наличия у вращающихся масс (колес, деталей, трансмиссии, вращающихся деталей двигателя) введем коэффициент δ. Коэффициент δ учета вращающихся масс показывает, во сколько раз энергия, затрачиваемая при разгоне вращающихся и поступательно движущихся деталей, больше энергии, необходимой для разгона, все детали которого движутся только поступательно.
При отсутствии точных данных коэффициент δ для ПА можно определять по формуле
 . (6.33)
. (6.33)
Нормальные реакции опорной поверхности колес. При движении ПА нормальные реакции Rn изменяются. Уменьшение или увеличение нагрузки на п-е колесо при движении ПА характеризуется коэффициентом λп изменения нормальной реакции
 (6.34)
(6.34)
где zn – нормальная реакция опорной поверхности (нагрузка) n-го колеса при стоянке ПА на горизонтальной дороге; G – масса ПА, сила веса, которая создает нагрузку zn.
Если нормальные реакции колес левой и правой стороны одной оси ПА равны, то коэффициент λn характеризует также и изменение нагрузки на ось.
Распределение силы веса (Gg) между колесами ПА зависит от положения центра масс автомобиля, жесткости подвески и рамы, давления воздуха в шинах. При вычислении zn влиянием всех факторов, кроме положения центра масс, обычно пренебрегают. Для двухосного автомобиля нагрузки zn вычисляют по формулам (рис. 6.15):
 (6.35)
(6.35)
 (6.36)
(6.36)
где z1, z2 –соответственно нагрузка на левое и правое колесо передней оси;
z3, z4 – соответственно нагрузки на левые и правые колеса задней оси.
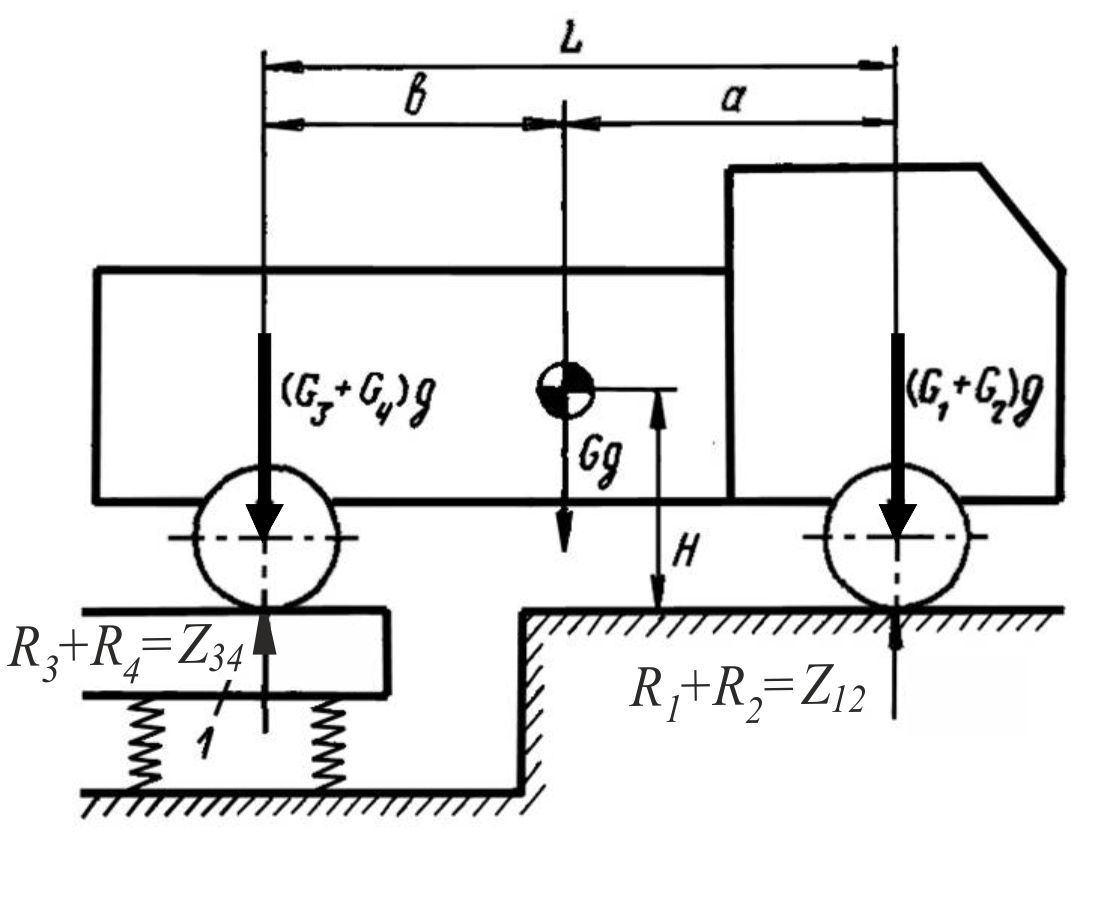
Рис. 6.15. Определение координат центра масс пожарного автомобиля:
1 – платформа весов
При компоновке ПА добиваются равного распределения силы веса между колесами одной оси:
 и
и  (6.37)
(6.37)
Из-за обязательного выполнения требований по равенству нагрузки на левые и правые колеса одной оси в технических характеристиках АТС и ПА принято указывать только G, расстояние между осями и массы, силы веса от которых передаются каждой осью. Для двухосного АТС указываются: G, L и G12, G34 Данные по G12и G34, которые приводятся в технических характеристиках АТС, определяются, как правило, экспериментально.
Для экспериментального определения z12 или z34 колеса передней или задней оси ПА устанавливают на весы (см. рис. 6.15). Для проверки равенств (6.37) ПА устанавливают на весы колесами одной стороны. Основные требования при взвешивании: полная комплектация ПА (при отсутствии боевого расчета его имитируют балластом); горизонтальная опорная поверхность колес ПА при взвешивании; расторможенные колеса и нейтральное положение рычага механической коробки передач. Взвешивают ПА, как правило, два раза: первый – при въезде на весы передним ходом, второй – при въезде на весы задним ходом. За зачетные значения G, z12 и z34 принимаются их средние арифметические.
По результатам взвешивания судят о возможности эксплуатации ПА. Необходимо выполнение трех основных требований:
масса G ПА не должна превышать полной массы базового шасси – собственной массы базового шасси плюс грузоподъемность;
распределение массы G между осями ПА (G12 или G34) должно соответствовать распределению между осями полной массы базового шасси;
нагрузка на колеса левой и правой стороны ПА должна быть равной.
Нагрузки на оси R12 и R34 при движении ПА определяются из уравнений (рис.6.15):

 (6.38)
(6.38)
 . (6.39)
. (6.39)
После преобразований уравнений (6.38), (6.39) и подстановки R12 и R34, z12 и z34 формул (6.35), (6.36) в формулу (6.27) получим:
 (6.40)
(6.40)
 (6.41)
(6.41)
где α > 0, ј > 0 – при подъеме и разгоне АТС; α < 0, ј < 0 – при спуске и торможении АТС.
Анализ формул (6.40) и (6.41) показывает, что при движении на подъеме и разгоне ПА увеличивается нагрузка на заднюю ось и уменьшается на переднюю. При движении на спуске и торможении ПА происходит обратное явление. Этим объясняется, например, подъем передней части ПА, наблюдаемый при разгоне, и наклон ее вниз («клевок») при торможении. При движении по дорогам с асфальтобетонным покрытием коэффициенты λ12 и λ34 ПА могут изменяться в пределах от 0,5 до 1,5. Предельные значения коэффициентов достигаются при движении по крутым уклонам и при интенсивном разгоне или торможении ПА со всеми ведущими осями или при экстренном торможении.
Уравнение силового баланса пожарного автомобиля
При использовании метода силового баланса уравнение (6.17) записывается в виде
Pк = Pf + Pi +Pj +Pв (6.42)
и называется уравнением силового баланса.
Последовательность решения уравнения (6.42) методом силового баланса:
1. Сумма сил в правой части уравнения (6.42) является суммарной силой сопротивления движению пожарного автомобиля – ΡΣ. Поэтому запишем:
ΡΣ = Pf + Pi +Pj +Pв
и подставим в него значения величин сил, тогда
ΡΣ = f Ggcosα + Ggsinα + gGj +KвFv2
ΡΣ = Gg(f cosα + sinα) + gGj +KвFv2 .
Обозначим (f cosα + sinα) = ψ – коэффициент сопротивления дороги, запишем
ΡΣ = [ψ + δ ј/g] Gg + KвFv2 . (6.43)
1. По формуле (6.22) вычисляется максимальная сила тяги Рφ, которую могут обеспечить ведущие колеса ПА по сцеплению с дорогой. Сила Рφ вычисляется с учетом перераспределения нагрузки между колесами ПА.
Двухосные и трехосные ПА при движении с подводом крутящего момента двигателя к ведущим колесам задних осей могут обеспечить по сцеплению с дорогой
 (6.44)
(6.44)
В этом уравнении G34 – масса ПА, воспринимаемая ведущими колесами.
Использование всех колес ПА для создания силы тяги позволяет увеличить Рφ на 15 – 30 %. Максимальная сила тяги Рφ полнопроводных ПА определяется по формуле
 (6.45)
(6.45)
2. Проверяется выполнение неравенства (6.24)
,
если неравенство не выполняется, то длительное (безостановочное) движение ПА на заданной передаче в известных дорожных условиях (α, f) со скоростью v и ускорением j невозможно. В зависимости от решаемой задачи изменяется один из перечисленных параметров и расчеты повторяются.
3. По формуле (6.19) вычисляется суммарная сила тяги (обозначим ее Рк), которую может обеспечить двигатель на ведущих колесах ПА. Крутящий момент двигателя Мд определяется по внешней скоростной характеристике (см. рис.6.4) или по формуле (6.7) –
Ме = 9550  H·м.
H·м.
5. Необходимая для движения сила тяги ΡΣ , вычисленная по формуле (6.18), сравнивается с силой тяги Рк, которую может обеспечить двигатель (см. формулу 6.19).
Если ΡΣ <  , то движение ПА возможно при неполном открытии дроссельной заслонки (карбюраторный двигатель) или при неполной подаче топлива (дизель).
, то движение ПА возможно при неполном открытии дроссельной заслонки (карбюраторный двигатель) или при неполной подаче топлива (дизель).
Если ΡΣ =  , то уравнение (6.36) решено и движение ПА возможно только при полном открытии дроссельной заслонки или полной подаче топлива, т. е. при использовании внешней скоростной характеристики двигателя.
, то уравнение (6.36) решено и движение ПА возможно только при полном открытии дроссельной заслонки или полной подаче топлива, т. е. при использовании внешней скоростной характеристики двигателя.
Если ΡΣ > , то движение ПА при заданных условиях (и, α, f, v, j) невозможно – двигатель не может обеспечить необходимую силу тяги на ведущих колесах. Один из параметров – и, α, f, v или j изменяется и расчеты повторяются с п. 1.
Методом силового баланса можно определить vmaxи vmin. Для этого при расчетах необходимо изменять и и v при j = 0, α = 0. Для определения αmax необходимо изменять v и α при движении ПА на первой передаче и
Рв ≈ 0. Для определения tv метод силового баланса не применяют из-за большого объема расчетов.
Уравнение мощностного баланса пожарного автомобиля
Метод мощностного баланса основан на анализе использования мощности двигателя при движении ПА. По аналогии с уравнением силового баланса уравнение мощностного баланса ПА можно записать в следующем виде
| Nп.о |
| NB |
 (6.46)
(6.46)
где Nд – мощность, которая передается от двигателя к трансмиссии ПА;
Nтр – мощность, затрачиваемая на преодоление трения в трансмиссии;
Nп.о – мощность, затрачиваемая на привод пожарного оборудования (например, насоса, механизма прокладки и сборки рукавных линии) при движении ПА.
После учета расхода мощности двигателя на работу дополнительного оборудования базового шасси (коэффициента Кс) и на трение в трансмиссии (учитывается коэффициентом η), а также, учитывая, что мощность N, кВт определяется N = P· ν·10ˉ3 , где v - скорость движения ПА, м/с, Р – сила, Н, уравнение (6.46) можно преобразовать к виду
 . (6.47)
. (6.47)
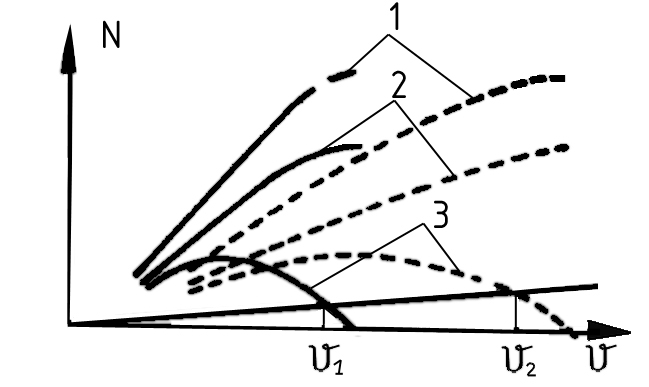
Графическое решение уравнения мощностного баланса для определения скорости движения ПА на первой и второй передачах с одновременной подачей воды из цистерны через лафетный ствол приведено на рис. 6.16.
| 1 |
| 2 |
| 3 |
| v |
| v2 |
| v1 |
| N |
| 4 |
Рис. 6.16. Графическое решение уравнения мощностного баланса пожарного автомобиля:
- движение на первой передаче; --- движение на второй передаче;
1 – Ne ; 2 – KeηNe; 3 – Nк = KeηNe – Nn; 4 – Nψ
Внешняя скоростная характеристика двигателя Ne(n) (см. рис. 6.4) построена в координатах N –n. При построении зависимости Ne(v) (см. рис. 6.16, кривая 1) предполагается, что нет пробуксовки ведущих колес ПА и для пересчета n в v, и наоборот, можно использовать формулу
 (6.48)
(6.48)
Вниз от Ne(v) отложена мощность, которая затрачивается на преодоление трения в трансмиссии и на обеспечение работы дополнительного оборудования базового шасси. Для движения ПА и привода насоса может быть использована мощность КсηNe (рис. 6.16, кривая 2).
Мощность Nпо отложена вниз от мощности КсηNe. Мощность Nпо, затрачиваемая на привод пожарного центробежного насоса, пропорциональна третьей степени частоты вращения рабочего колеса насоса. Зависимость Ne(n), а следовательно, и зависимость КсηNe в координатах N– v (рис. 6.16, поз. 2) также представляет собой многочлен третьей степени (формула (5.11)). Поэтому зависимость мощности, которую может обеспечить двигатель на ведущих колесах ПА (рис. 6.16, кривая 3), – кубическая парабола, вид которой зависит: от внешней скоростной характеристики двигателя Ne(nд), от передаточного числа и и коэффициента полезного действия ηтрансмиссии ПА на включенной передаче, от передаточного числа итн и коэффициента полезного действия ηтн трансмиссии пожарного насоса, от подачи Qн, напора Hн и коэффициента полезного действия ηн насоса.
Если принять, что коэффициент f – величина постоянная и сила сопротивления воздуха при движении на первой и второй передаче пренебрежительно мала, то правая часть уравнения (6.47) представляет собой наклонную прямую (рис. 6.16, прямая 4), проходящую через начало координат.
При полном открытии дроссельной заслонки карбюраторного двигателя или при полной подаче топлива дизельного двигателя движение ПА на первой и второй передачах не может быть более скоростей v1 и v2. Скорости v1 и v2 определяются по точкам пересечения (см. рис. 6.16). Для равномерного движения в тех же условиях со скоростью, меньшей v1 или v2, водитель должен прикрыть дроссельную заслонку карбюраторного двигателя или уменьшить подачу топлива дизельного двигателя, что приведет к уменьшению частоты вращения коленчатого вала двигателя и, как следствие, к уменьшению подачи Qни напора Нн насоса.
Если на ПА установлена коробка отбора мощности (КОМ) с постоянным передаточным числом, то водителю сложно одновременно обеспечить и необходимую скорость движения, и необходимую подачу воды из лафетного ствола. Для того чтобы обеспечить водителю возможность одновременного выбора требуемых скорости движения и подачи воды из лафетного ствола, необходимо или устанавливать КОМ с переменным передаточным числом, или устанавливать на ПА такие двигатели и насосы, в графике мощностного баланса которых кривая 3 на первой и второй передачах не пересекают прямую 4.Метод мощностного баланса удобно использовать при выборе двигателя базового шасси ПА. Использовать этот метод для определения vmax, tυ , аmax, vminнецелесообразно, так как приходится дополнительно вычислять Р, Рφ проверять выполнение неравенства .
Динамическая характеристика пожарного автомобиля
Методы силового и мощностного баланса имеют общий недостаток – при использовании этих методов трудно сравнивать тягово-скоростные свойства АТС с различными массами, так как при движении в одинаковых условиях силы и мощности, необходимые для преодоления сопротивления дороги, различны. От этого недостатка свободен метод динамической характеристики, предложенный Е. А. Чудаковым.
Динамическим фактором D АТС называется отношение
D = (Pк-Pв)/Gg. (6.49)
Если в правую часть уравнения (6.49) подставить значения Pк и Pв , то после преобразований получим формулу для вычисления динамического фактора:
 , (6.50)
, (6.50)
который могут обеспечить двигатель и трансмиссия на ведущих колесах АТС.
Если подставить значение Pк (6.43), то получим формулу для вычисления динамического фактора:
 , (6.51)
, (6.51)
который необходимо обеспечить для движения в заданных условиях.
Чтобы учесть ограничение реализуемых Pк силами сцепления ведущих колес с дорогой, необходимо использовать предельное значение силы тяги по формуле (6.23). Автомобиль из-за ограниченной силы сцепления Pφ колес с дорогой не может реализовать динамический фактор, больший
 (6.52)
(6.52)
Длительное движение АТС в заданных дорожных условиях (ψ или α, f) со скоростью v и ускорением j возможно, если выполняется условие
 . (6.53)
. (6.53)
При равномерном движении (f = 0) полноприводного ПА с малой скоростью (Pв= 0) условие (6.54) с учетом формул (6.46) и (6.52) записывается в виде
 . (6.54)
. (6.54)
При равномерном движении (j = 0) двухосных и трехосных ПА по горизонтальной дороге (α= 0) с малой скоростью (Pв= 0) условие (6.54) с учетом формул (6.42), (6.45) и (6.52) записывается в виде
(G34/G)  . (6.55)
. (6.55)
Динамической характеристикой автомобиля D(v) называют зависимость динамического фактора D (6.49) от скорости движения на различных передачах.
Для построения динамической характеристики необходимо:
1. На внешней характеристике двигателя Мe (см. рис. 6.4) выбрать несколько значений nдi и соответствующих им Мei. По формуле (6.2) определить Мдi.
2. По формуле (6.48) определить vi , которые соответствуют nдi на первой передаче.
3. По формуле (6.51) определить Di, соответствующие vi на первой передаче. Повторить расчеты с п. 2 для каждой последующей передачи.
По динамической характеристике D(v) определяются vmax , amax и vmin.
Для определения vmax на участке дороги с коэффициентом сопротивления качению f и уклоном a необходимо по оси ординат динамической характеристики D(v) отложить коэффициент y (см.формулу (6.43) y = fcosα + sinα), масштаб D и y должен быть одинаков, и провести прямую, параллельную оси абсцисс. Возможны несколько случаев.
1. Если линия y (прямая 1 на рис. 6.17, а) пересекает динамическую характеристику в одной точке, то vmax= v1, так как при превышении этой скорости не выполняется условие (6.54). В зависимости от yэто пересечение может быть на любой передаче.
2. Если линия y(прямая 2 на рис. 6.17, а или 3 на рис. 6.17, б) не пересекает динамическую характеристику, то равномерное движение ПА при полностью открытой дроссельной заслонке карбюраторного двигателя или при максимальной подаче топлива дизельного двигателя невозможно, так как D > Dy и начинается разгон ПА. Чтобы обеспечить равномерное движение, водитель должен прикрыть дроссельную заслонку карбюраторного двигателя или уменьшить подачу топлива дизельного двигателя. Максимальная скорость ПА будет ограничена максимально допустимой угловой скоростью коленчатого вала двигателя. Например, vmax= v2 при движении на пятой передаче и vmax= v3 при движении на второй передаче.
| 2 |
| Dmax |
| vmin |
| Dmax |
| 5 |
| 3 |
| 4 |
| vmin |
| v2 |
| v |
| v4 |
| v3 |
| v5 |
| б |
| 1 |
| v1 |
| а |
| v |
 | |
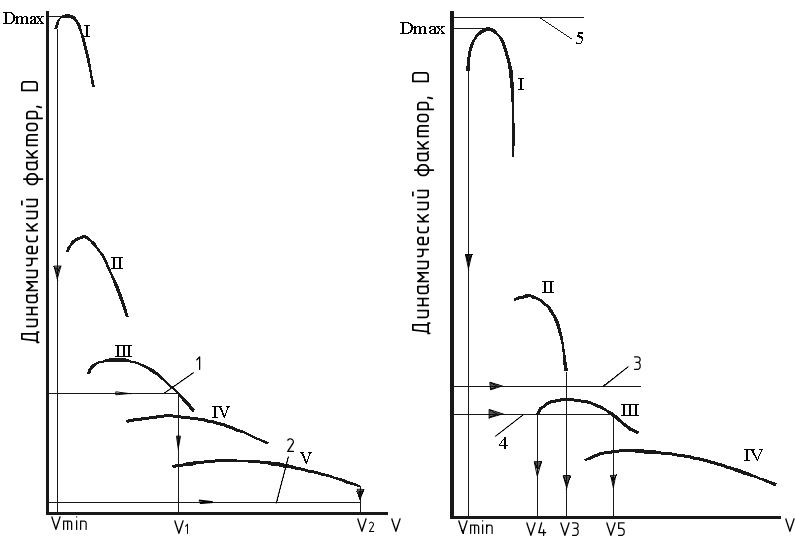
Рис. 6.17.Динамическая характеристика пожарного автомобиля:
а – на шасси АТС с 5-ступенчатой коробкой перемены передач;
б – на шасси с 4-ступенчатой коробкой перемены передач; I -V – передачи
3. Если линия y (прямая 4 на рис. 6.17, б) пересекает динамическую характеристику в двух точках, то ПА может равномерно двигаться как со скоростью v4, так и со скоростью v5.
4. Если линия y (прямая 5 на рис. 6.17, б) выше динамической характеристики, то не выполняется условие (6.54), и равномерное движение ПА при таком коэффициенте y невозможно.
Для определения максимального угла подъема amax необходимо по динамической характеристике найти максимальное сопротивление дороги Dy=Dmax, которое может преодолеть ПА на первой передаче (рис. 6.17).
Преодолевая подъем amax при ј = 0 (формула 6.51) можно записать Dmax = Dy = y. Суммарное сопротивление движению автомобиля при преодолении подъема равно (см. формулу 6.43) y = fcosα + sinα. Приняв усредненное значение f и i = sinα ≈ tgα, запишем Dmax = f + i, тогда максимальная величина угла подъема, преодолеваемая пожарным автомобилем, определяется по формуле
i = Dmax – f = tgαmax (6.56)
Скорость vmin определяется, как правило, только для низшей (первой) передачи (см. рис. 6.17).
Для определения vmin ПА при движении по поверхности с твердым покрытием необходимо знать частичные характеристики двигателя и учитывать использование части крутящего момента двигателя Mд на привод пожарного оборудования, например насоса.
Дополнительное электрооборудование
Пожарные автомобили следуют на пожары с большими скоростями, эксплуатируются в разное время суток, часто при недостаточном освещении объектов. Все это требует высокой информативности ПА, приспособленности его к использованию в различное время суток. Этим обусловлена необходимость специального, дополнительного оборудования.
Дополнительное электрооборудование включает:
приборы сигнализации, обеспечивающие информацию о движении ПА;
внешнее освещение, освещение рабочих мест и отсеков пожарного автомобиля, обеспечивающих работу пожарных в темное время суток;
дублирующие контрольно-измерительные приборы и систему пуска стартера из насосного отделения;
отопление кабины расчета;
работу средств связи, работу контрольных приборов и пожарной надстройки, указателей, дополнительных подогревателей.
Электрооборудование АЦ, производимых предприятиями России, идентично. Поэтому рассмотрим его на примере наиболее массовых АЦ.
| 1 |
| 2 |
| 3 |
| 4 |
| 5 |
| 7 |
| 6 |
| 8 |
| 9 |
| 16 |
| 15 |
| 14 |
| 13 |
| 12 |
| 11 |
| 10 |
| 11в |
| 11г |
| 11д |
| 11б |
| 11а |
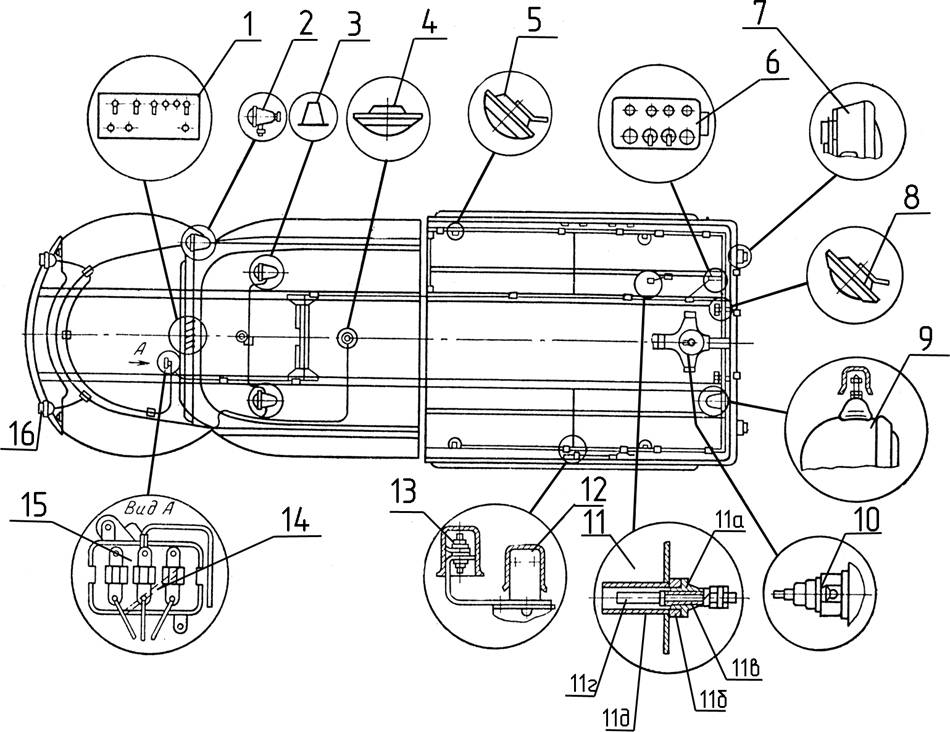
Рис. 6.18. Дополнительное оборудование пожарной автоцистерны АЦ-40(131)137:
1 – щиток приборов у водителя; 2 – фара-прожектор; 3 – сигнальные фары; 4, 5 и
8 – плафоны освещения; 6 – щиток приборов насосного отделения; 7 – задние фонари;
9 – задняя фара; 10 – лампа подсвета вакуумного клапана; 11 – датчик для определения количества воды в цистерне; 12 – выключатели отсеков кузова; 13 – диоды;
14 – биметаллический прерыватель; 15 – блок предохранителей;
16 – противотуманные фары
Выключатели освещения и сигнальные лампы размещены в кабине водителя на ее передней стенке на щитке 1. Фара-прожектор 2 обеспечивает освещение объекта. Она установлена на специальном кронштейне, позволяющем изменять ее положение в вертикальной и горизонтальной плоскостях. Освещение места работы у насосного отделения и водоема производится задней фарой 9. Она укрепляется на кронштейне пенала, позволяющем изменять ее положение в горизонтальной плоскости. На пожарных автомобилях применяют фары типа ФТ-1Б с электролампами
А-12-50-21 мощностью 41 Вт или ФТ-304 с электролампами А-12-32 мощностью 27 Вт. Сигнальные фары 3 подают прерывистые световые сигналы синего цвета. Они установлены на крыше пожарного автомобиля. Освещение кабины водителя и салона боевого расчета, отсеков кузова и насосного отделения осуществляется плафонами 4, 5 и 8. Для этой цели используются плафоны ПК-201 с лампами А-12-3 мощностью 5,9 Вт.
Выключатели и контрольные лампы приборов насосного отделения размещены на щитке 6 насосного отделения. Задние фонари 7 включаются включателями автомобиля.
Подсвет вакуумного клапана производится лампой 10 (А-12-1 или
А-12-1,5), помещенной в патрон ПП-1-200. Ее включение облегчает определение поступления воды в насосе при постановке пожарного автомобиля на водоисточник или заполнении его из цистерны.
Датчики 11 используются для определения количества воды в автоцистерне. Датчик состоит из стальной трубки 11д, внутри которой размещен гидроконтакт 11г на изоляторах 11а и 11в. Плотность постановки датчиков в цистерну обеспечивает прокладка 11б. Вода, заполняющая полость между гидроконтактами 11г и трубкой 11д, замыкает электрическую цепь. При этом загораются контрольные лампочки, установленные на щитке 6.
В цистерне установлены 3 датчика, а на щитке 6 имеются три контрольные лампочки, показывающие полную, половину и четверть заправки цистерны водой.
Выключатели 12 освещения (тип ВК-2-А2) отсеков кузовов включают свет при открывании дверцы отсека. Параллельно им включены диоды 13 (тип Д-202).
Биметаллический прерыватель 14 (тип РС-57-Б) обеспечивает работу сигнальных фар. Он установлен на блоке предохранителей 15 (Пр-10А), прикрепленном к передней стенке кабины со стороны водителя.
Освещение дороги во время тумана производится противотуманными фарами 16 типа ФТ-119. В них устанавливаются лампы А-12-50-40
(40,5 Вт) или А-12-21-2 (19 Вт).
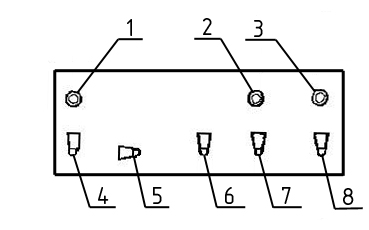
Щиток приборов насосного отделения (рис. 6.19). Щиток закреплен на стенке с правой стороны насосного отделения. На нем имеются: контрольные лампы 1 – 3, указывающие полную заправку емкости, половину и одну четверть емкости; контрольная лампа 4, включающаяся при нагреве воды в системе охлаждения выше 115 оС; контрольная лампа 5, включающаяся при уменьшении давления масла в системе смазки двигателя; включатель 6 для включения контрольных ламп 1 – 3 уровня воды в цистерне; включатель 7 для включения плафонов и подсвета в вакуумном клапане; кнопка 8 дистанционного запуска стартера.
Контрольные лампы 4 и 5 могут сигнализировать и состояние систем охлаждения двигателя и смазки только при условии, если у водителя переключатель будет поставлен в положение «насосный отсек».
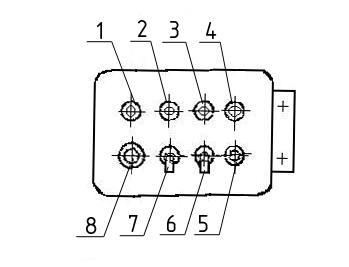
Приборы в кабине водителя. Выключатели и сигнальные лампы в кабине водителя размещены так, как показано на рис. 6.20. На щитке в насосном отделении и в кабине водителя установлены выключатели ВК-57. При их включении включаются потребители энергии и загораются контрольные лампочки. Они указывают на то, что приборы освещения включены.
| Рис. 6.19. Щиток приборов насосного отделения: 1–3 – лампы-указатели количества воды в цистерне; 4 – лампа, сигнализирующая о перегреве воды в системе охлаждения; 5 – лампа, сигнализирующая о снижении давления в системе смазки; 6 – включатель лампы подсвета вакуумного клапана; 7 – включатель плафона насосного отсека; 8 – кнопка стартера |
| 1 |
| 2 |
| 3 |
| 4 |
| 5 |
| 6 |
| 7 |
| 8 |
| Рис. 6.20. Щиток приборов у водителя: 1–3 – сигнальные лампы включателей; 4 – включатель сигнальных фар проблесковых маяков; 5 – включатель задней фары; 6 – включатель фары прожектора; 7 – переключатель «кабина-насосный отсек» сигнальных ламп систем охлаждения и смазки; 8 – включатель освещения кузова |
| 1 |
| 2 |
| 3 |
| 8 |
| 7 |
| 6 |
| 5 |
| 4 |
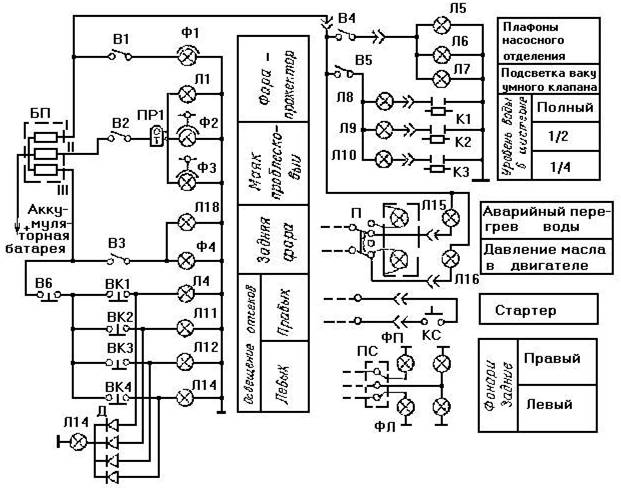
Принципиальная схема электрооборудования. Принципиальная схема дополнительного оборудования представлена на рис.6.21. В этой схеме различают три электрические цепи. Провод от аккумуляторной батареи (+) подводит электрический ток к блоку предохранителей (БП). В этом блоке все плавкие предохранители рассчитаны на прохождение электрического тока до 10 А. Рассмотрим все цепи от блока предохранителей до соединения провода на массу (аккумуляторной батареи).
Электрическая цепь № 1. В эту цепь параллельно включены ряд потребителей. Включателем В1 (см. поз. 6 на рис. 6.20) включается фара прожектора Ф1. Включателем В4 (см. поз. 6, 7 на рис. 6.19) включаются плафоны Л5 и Л6 насосного отделения и лампа Л7 подсвета вакуумного клапана. Включателем В5 включаются лампы Л8-Л10, указывающие уровень воды в цистерне. При заполненной цистерне замкнуты все датчики К1, К2 и К3. Все лампочки Л8-Л10 будут включены, по мере уменьшения количества воды лампочки будут выключаться.
В эту же электрическую цепь включены сигнальные лампы Л15 аварийного перегрева воды и Л16 минимального давления масла в двигателе. В насосном отсеке эти лампы горят только в случае, когда переключатель П (см. поз. 7 на рис. 6.20) включен в положение «насосный отсек». Лампа Л15 загорается, если температура охлаждающей жидкости равна 113 оС. Лампа Л16 загорается при понижении давления масла в системе смазки двигателя до 30–60 кПа.
| Подсветка вакуумного клапана |
| полный |
| правый |
| левый |
  |
Рис. 6.21. Принципиальная схема дополнительного электрооборудования
на АЦ-40(131)137
Электрическая цепь № 2. Эта цепь образована включением проблесковых маяков Ф2 и Ф3 с прерывателем ПР1. Включается цепь включателем В2 (см. поз. 4 на рис. 6.20) и контролируется включением лампы Л1 (см. поз. 8 на рис. 6.20).
Электрическая цепь № 3. В эту цепь включены задняя фара Ф4 (см. поз. 4 на рис. 6.18) с контрольной лампой Л18 (см. поз. 4 на рис. 6.19). Включается фара включателем В3 (см. поз. 4 на рис. 6.20).
На панели водителя (см. поз. 8 на рис. 6.20) находится включатель В6. Он предназначен для обеспечения питания плафонов освещения отсеков кузова Л4 и Л11-Л13. Включаются эти плафоны выключателями ВК1-ВК4 (см. поз. 12 на рис. 6.18). При открывании отсека срабатывают включатели и загорается соответствующая лампа плафона. Одновременно через диод Д (см. поз. 13 на рис. 6.18) будет подведен электрический ток к лампочке Л14 (см. поз. 1 на рис. 6.20). Диоды Д исключают прохождение электрического тока через лампы плафонов закрытых отсеков кузова, когда другие отсеки открыты.
Цепь кнопки пуска стартера в насосном отсеке, а также задние фонари ФП и ФЛ включены в систему электрооборудования базового автомобиля.
Некоторые типы приборов электрооборудования пожарных автомобилей указаны в табл. 6.9.
Таблица 6.9
| Обозначение по схеме | Тип прибора |
| Включатель В1-В6 Включатель ВК1-ВК4 Фара Ф1,Ф4 Плавкий предохранитель Биметаллический прерыватель ПР1 Лампы Диоды Д1-Д4 Плафоны Л11-Л12 Электролампы 10 Кнопка стартера Контрольная лампа Л14 Контрольные лампы Л8-Л10 | ВК-57 ВК2-А2 Фара ФГ-16, лампа А12-50, 41 Вт или ФГ-391, лампа А12-32, 27 Вт Пр10-А РС57-Б А 12-1 Д202 ПК201, лампы А12-3, 5.9 Вт А12-1 в ПП1-200 ВК322 ПД200Е ПД20Д |
Соединительные провода дополнительного электрооборудования марки ПГВА-1,5 мм2 и ПГВА-4 мм2 заключены в пластикатовые трубки. Трубки с проводами крепятся к элементам конструкции пожарного автомобиля металлическими скобами.
Отдельные участки электроцепей соединяются штепсельными разъемами Ш типа ШР32П12ЭШ1.
Описанная выше принципиальная схема дополнительного электрооборудования применяется практически на всех автоцистернах на базе автомобилей ЗИЛ-131. Однако на отдельных типах пожарных автоцистерн имеются изменения.
На ряде автоцистерн нового поколения, особенно производства ОАО «Пожтехника» (г. Торжок), функции дополнительного электрооборудования значительно расширены. Рассмотрим их на примере АЦ-7-40(53213).
Дополнительное электрооборудование АЦ-7-40(53213). Питание потребителей автоцистерны осуществляется постоянным током, напряжение 24 В от бортовой сети шасси. Проблесковые маяки запитываются от аккумуляторов шасси напряжением 12 В.
Все электрооборудование можно разделить на три группы.
В кузове АЦ установлены блок связи, щиток управления, лампы освещения отсеков. Датчики уровня воды и пенообразователя находятся в цистерне для воды и в баке пенообразователя.
В кабине водителя размещается блок управления лафетным стволом, щиток контроля, СГУ-80, блок связи, блок связи водителя и лампа сигнализации об открытии дверей.
На кабине шасси смонтирована фара-прожектор и маяки с громкоговорителем СГУ-80.
Электрооборудование обеспечивает:
управление механизмами;
контроль функционирования механизмов и систем;
требуемые условия работы боевых расчетов.
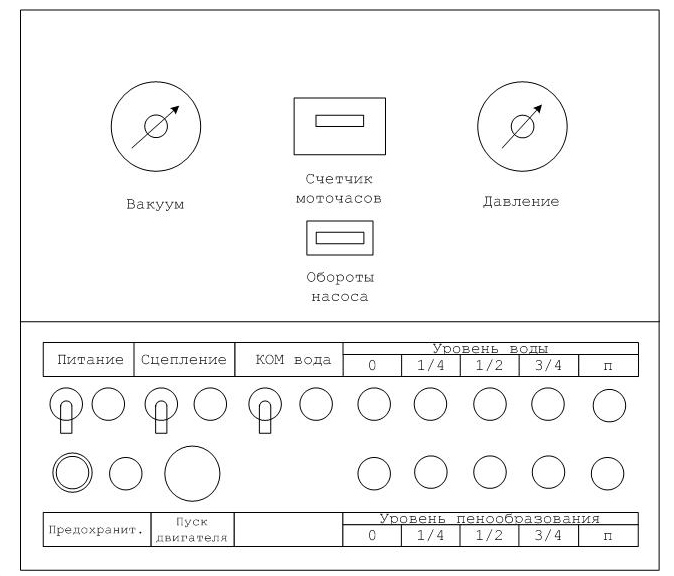
Соответствующие тумблеры включения механизмов и сигнализаторы функционирования их и других систем сосредоточены на щитке приборов и щитке управления (рис. 6.22) и на щитке контроля (рис. 6.23).
Щиток приборов и щиток управления устанавливается в насосном отсеке. Он служит для контроля за работой механизмов автоцистерны, дистанционного управления двигателем, включения КОМ водяного и масляного насоса, а также контроля уровня воды и пенообразователя.
На щитке приборов установлены вакуумметр и манометр для контроля работы центробежного насоса, счетчик моточасов и тахометр.
На щитке управления находятся тумблер включения питания, сцепления и КОМ центробежного насоса. Кнопкой «Пуск двигателя» осуществляется дистанционный его пуск. В правой части расположены светодиоды контроля уровня воды в цистерне и пенообразователя в пенобаке.
Защита цепей осуществляется предохранителями.
Щиток контроля установлен в кабине водителя. Он служит для управления и контроля за работой КОМ привода центробежного и масляного насоса, вентиля поступления воды в лафетный ствол, включения фар, уровня воды и пенообразователя.
| 10 |
| 8 |
| 6 |
| 7 |
| 9 |
| 4 |
| 5 |
| 3 |
| 2 |
| 1 |
Рис.6.22 Щиток приборов и щиток управления:
1 – лицевая панель; 2, 4 – мановакуумметры; 3 – счетчик времени; 5 – тахометр;
6 – панель щитка управления; 7 – светодиоды; 8 – кнопка; 9 – предохранитель;
10 – тумблер
| 3 |
| 5 |
| 2 |
| 1 |
| 4 |
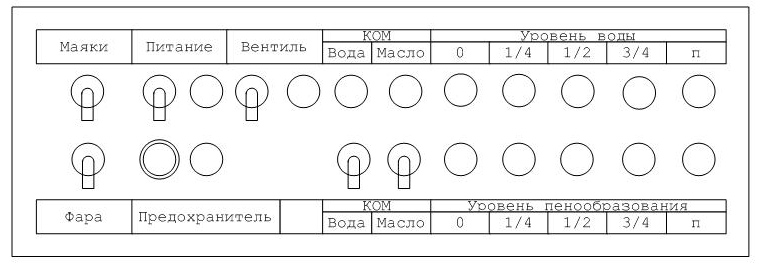
Рис. 6.23. Щиток контроля:
1 – лицевая панель; 2 – светодиоды; 3 – предохранитель; 4 – тумблер;
5 – вентиль
Размещение тумблеров различного назначения показано на рис. 6.23.
В случае если на автоцистерне нет лафетного ствола, тумблер
«Вентиль» будет заглушен. При необходимости привода масляного насоса (например, на автоцистерне с лестницей) будет разблокирован тумблер КОМ-масло.
Дата добавления: 2015-04-10; просмотров: 1890;