Лекция 10. ИЗМЕРИТЕЛИ ЧАСТОТЫ ВРАЩЕНИЯ БУРИЛЬНОЙ КОЛОННЫ
Наряду с осевой нагрузкой на долото частота вращения бурового инструмента является важнейшим параметром режима вращательного бурения. Именно благодаря вращению обеспечивается распространение процесса разрушения, вызванного внедрением резцов, на всю поверхность забоя. В первом приближении механическая скорость бурения равна  (10.1)
(10.1)
где  – внедрение резца,
– внедрение резца,  – количество резцов и
– количество резцов и  – частота вращения. В тех случаях, когда это соотношение полностью справедливо, следует использовать максимальные частоты, которые может обеспечить мощность привода и прочность бурильной колонны.
– частота вращения. В тех случаях, когда это соотношение полностью справедливо, следует использовать максимальные частоты, которые может обеспечить мощность привода и прочность бурильной колонны.
Однако в большинстве случаев (при прочих равных условиях) внедрение зависит не только от осевой нагрузки но и частоты вращения. Это происходит вследствие затупляемости резцов. Резцы затупляются тем быстрее, чем больше скорость их движения по поверхности породы, т. е. частота вращения. При этом важно соотношение твердости материала резца и породы. Темп затупляемости низок, если твердость резцов во много раз больше твердости породы. Это имеет, например, место при алмазном бурении по породам VII – IX категорий. При использовании менее твердого породоразрушающего инструмента (и даже алмазного инструмента по породам выше IX категории) фактор затупляемости резцов приобретает большое значение, и частоты вращения приходится ограничивать, повышая при этом осевые нагрузки.
Таким образом в большинстве случаев существует некоторая оптимальная частота вращения, обеспечивающая интенсивный и медленно снижающийся темп углубки (максимум рейсовой скорости – (формула (4.1) Такую частоту необходимо определить и затем поддерживать. Для этого требуются измерители частоты – тахометры.
Однако целесообразность использования тахометров для контроля частоты вращения бурильной колонны зависит от типа привода вращателя. Различные типы привода отличаются жесткостью характеристики. Жесткость характеристики двигателя определяется его способностью сохранять частоту вращения при увеличении нагрузки.
Наиболее жесткую характеристику имеют синхронные электродвигатели переменного тока (получившие определенное распространение в установках бурения на нефть и газ). Рост нагрузки (крутящего момента на буровом валу) не приводит к уменьшению их частоты вращения. Если же нагрузка достигает предельной величины, то синхронный электродвигатель останавливается.
Широко распространенные в технике асинхронные электродвигатели переменного токаимеют умеренно жесткую характеристику. С ростом нагрузки (т. е. момента на валу) наибольшее уменьшение частоты вращения (от частоты холостого хода) у них обычно составляет около 10 %. При дальнейшем росте момента они останавливаются.
Дизельный привод имеет умеренно мягкую характеристику – под нагрузкой дизель может сбросить до 30 % от частоты холостого хода. Используемые при бурении на нефть и газ в комплекте с дизелями гидротрансформаторы делают характеристику еще мягче
Мягкую характеристику имеют электродвигатели постоянного тока. Их частота может уменьшаться по сравнению с номинальной во много раз (до нескольких об/мин)
Если в качестве привода вращателя используется двигатель с жесткой характеристикой, то необходимость в тахометрах отсутствует, т. к. частота вращения однозначно определяется положением рукоятки переключения передач вращателя. Для асинхронных электродвигателей ошибка определения частоты вращения по положению рукоятки может составлять примерно  5 %. .
5 %. .
Если привод имеет мягкую характеристику, то при одном и том же положении рукоятки переключения передач истинная частота вращения может сильно отличаться от номинальной, и поэтому использование тахометра является необходимостью.
В последнее время привод с мягкой характеристикой внедряется на буровых работах все шире, т. к. он обеспечивает уменьшение динамических нагрузок на все элементы как поверхностной трансмиссии, так и бурового вала и долота. Это преимущество способствует росту срока службы оборудования, а также снижение риска аварий. Кроме того, плавное бесступенчатое регулирование позволяет повысить точность оптимизации частоты вращения ПРИ, а отсутствие коробок передач уменьшает массу буровой установки.
В качестве тахометров обычно используются электрические тахогенераторы. Тахогенератор –этогенератор электроэнергии, напряжение на выходе которого пропорционально скорости вращения его ротора. Бывают тахогенераторы постоянного и переменного тока. Вторые (рис. 10.1) дешевле, проще по конструкции и в обслуживании.
Ротор 8 тахогенератора переменного тока 7 (рис. 10.2) соединен с приводным валом роторного стола 2 . Он представляет собой цилиндр из немагнитного металла. На рис. 10.1 ротор тахогенератора дан в разрезе и обозначен цифрой 2. Статор 1 тахогенератора имеет две намотанные в продольном направлении и перпендикулярно друг другу обмотки.
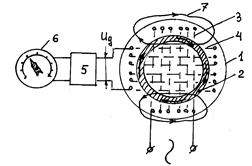
Рис. 10.1. Тахогенератор переменного тока
1 – статор; 2 – ротор; 3 – обмотка возбуждения; 4 – измерительная обмотка; 5 – усилитель; 6 – показывающий прибор; 7 – магнитные силовые линии;  – напряжение датчика
– напряжение датчика
Если роторный стол не вращается, то ротор тахогенератора также находится в покое. Переменный ток движется от своего источника по виткам обмотки возбуждения 3 и создает магнитный поток 7. Поскольку измерительная обмотка 4 расположена перпендикулярно к обмотке возбуждения, магнитные силовые линии скользят вдоль витков измерительной обмотки, не возбуждая в ней ЭДС. Стрелка показывающего прибора 6 стоит на нуле.
Если роторный стол вращается, то вместе с ним вращается и ротор 2 тахогенератора. Вращаясь, он пересекает магнитные силовые линии 7. В результате пересечения в металлическом стакане ротора 2 возбуждается ЭДС, порождающая круговой ток (так
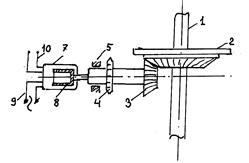
Рис. 10.2. Схема подключения датчика тахогенератора к приводу ротора
1 – ведущая бурильная труба; 2 – роторный стол; 3 – коническая шестерня; 4 – приводная звездочка; 5 – подшипник; 7 – корпус; 8 – ротор; 9 – линия питания обмотки возбуждения; 10 – выводы измерительной обмотки.
называемый “ток Фуко” – показан стрелками на сечении стакана). Как любой ток, ток Фуко сопровождается магнитным полем. Вращаясь вместе с стаканом 2, магнитное поле “тока Фуко” пересекает витки измерительной обмотки и возбуждает в них пропорциональную частоте вращения ЭДС. После усиления и выпрямления это напряжение подается на гальванометр 6, проградуированный в единицах частоты.
Тахометры применяют не только для контроля частоты вращения бурильных труб, но и для оценки производительности поршневого (плунжерного) насоса по формуле
 , (10.2)
, (10.2)
где  – коэффициент наполнения цилиндров насоса,
– коэффициент наполнения цилиндров насоса,  – объем цилиндров (с учетом их количества и типа насоса – одинарного или двойного действия), – частота вращения кривошипного вала насоса. известно на основании конструкции и размеров насоса, зависит от условий работы насоса, а устанавливается по тахометру. Если тахометр удобно связывать не с кривошипным валом, а с каким-либо из предшествующих валов передачи на насос, то учитывается передаточное отношение от этого вала к кривошипному.
– объем цилиндров (с учетом их количества и типа насоса – одинарного или двойного действия), – частота вращения кривошипного вала насоса. известно на основании конструкции и размеров насоса, зависит от условий работы насоса, а устанавливается по тахометру. Если тахометр удобно связывать не с кривошипным валом, а с каким-либо из предшествующих валов передачи на насос, то учитывается передаточное отношение от этого вала к кривошипному.
В установках бурения на нефть и газ с помощью тахометров контролируют также частоту вращения вала лебедки.
Рекомендуемая литература: 2. с. 152-154
Контрольные вопросы
1. Каково влияние частоты вращения на механическую скорость бурения?
2. Как зависит потребность в тахометрах от жесткости привода вращателя?
3. Как устроен и работает тахогенератор переменного тока?
Дата добавления: 2015-06-27; просмотров: 2249;