Рекурсивні фільтри з нескінченною імпульсною характеристикою
На відміну від КІХ НІХ-фільтри мають традиційні аналогові еквіваленти (фільтри Баттерворта, Чебишева, еліптичний і Бесселя) і можуть бути проаналізовані і синтезовані з використанням традиційних методів проектування фільтрів. НІХ-фільтри одержали таку назву, тому що їхні імпульсні характеристики розтягнуті на нескінченному часовому інтервалі. Це визначається тим, що дані фільтри є рекурсивними, тобто використовують зворотний зв'язок.
Хоча НІХ-фільтри можуть бути реалізовані з меншою, ніж КІХ-фільтри, кількістю обчислень, НІХ-фільтри не можуть мати таких характеристик, якими володіють КІХ-фільтри. Більш того, НІХ-фільтр не має лінійної фазової характеристики. Але обчислювальні переваги НІХ-фільтра губляться, коли вихідний сигнал фільтра піддається децимації, оскільки в цьому випадку всякий раз приходиться обчислювати заново значення вихідної величини.
Як правило НІХ-фільтри реалізуються за допомогою ланок другого порядку, що називаються біквадратними фільтрами, тому що описуються біквадратними рівняннями в z-області. Фільтри високого порядку проектують, використовуючи каскадування біквадратних ланок. Наприклад, фільтр шостого порядку вимагає трьох біквадратних ланок.
Характеристики рекурсивних фільтрів з нескінченною імпульсною характеристикою (НІХ):
- мають зворотний зв'язок (рекурсія);
- імпульсна характеристика має нескінченну тривалість;
- потенційно нестабільні;
- нелінійна фазочастотна характеристика;
- більш ефективні, ніж КІХ-фільтри;
- немає обчислювальних переваг при децимації по виходу;
- звичайно проектуються за характеристикою аналогового фільтра;
- як правило реалізуються каскадним з'єднанням ланок другого порядку (біквадратних фільтрів).
Загальне рівняння цифрового фільтра описує узагальнену передатну функцію H(z), що містить поліноми у чисельнику і знаменнику.
Структура біквадратного НІХ-фільтра. Нулі формуються коефіцієнтами прямого зв'язку b0, b1, b2; а полюси (порядок) визначаються коефіцієнтами зворотного зв'язку  і
і  :
:
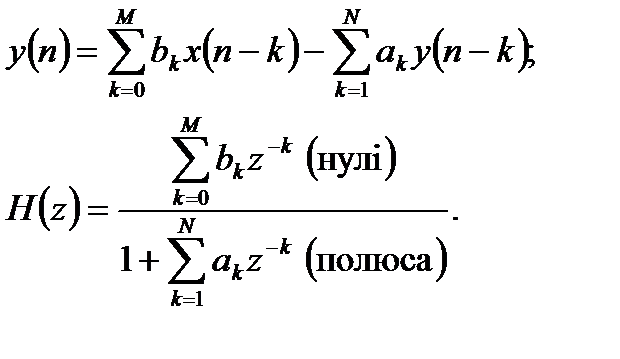
Хоча існує можливість створення безпосередньо за цим рівнянням НІХ-фільтра більш високого порядку (так звана пряма реалізація), але накопичення помилок квантування (через арифметику з фіксованою точкою і кінцевою довжиною слова) можуть викликати нестійкість роботи фільтра. З цієї причини практична реалізація виконується, як правило, каскадним включенням декількох біквадратних ланок з відповідними коефіцієнтами замість прямої форми реалізації.
Дані при обчисленні біквадратних фільтрів можуть масштабуватися роздільно, а потім біквадратні ланки каскадуються для мінімізації помилок квантування коефіцієнтів і помилок рекурсивного накопичення. Каскадні біквадратні фільтри працюють більш повільно, ніж їхні еквіваленти прямої форми реалізації, але вони, як правило, стійкі й у них мінімізуються ефекти, зв'язані з арифметичними помилками кінцевої розрядності даних.
Перша пряма форма біквадратної ланки вимагає використання чотирьох регістрів (рис. 9.7) і одного суматора.

Рисунок 9.7. — Апаратна реалізація НІХ-фільтра другого порядку
біквадратного (форма 1).
Ця конфігурація може бути замінена еквівалентною схемою, представленою на рис. 9.8, що називається другою прямою формою реалізації і вимагає використання тільки двох регістрів і двох додавачів. Можна показати, що рівняння, що описують біквадратний НІХ-фільтр другої прямої форми реалізації, такі ж, як і рівняння першої прямої форми реалізації. Як і у випадку КІХ-фільтра, система позначень при зображенні НІХ-фільтра часто спрощується.

Рисунок 9.8. — Апаратна форма реалізації біквадратного НІХ-фільтру
другого порядку (форма 2).
В цьому випадку необхідно виконати такі умови:
§ приводиться до такого ж рівняння, як для першої прямої форми;
§  ;
;
§ вимагає тільки 2 елементи затримки (регістра).
Популярний метод проектування НІХ-фільтра зводиться до того, що спочатку проектується еквівалентний аналоговий фільтр, а потім функція передачі  перетвориться за допомогою математичних перетворень в z-область,
перетвориться за допомогою математичних перетворень в z-область,  . Проектування фільтрів більш високих порядків виконується каскадним включенням біквадратних ланок, що гарантує не тільки стійкість системи, але і задані динамічні властивості (утримання перерегулювання, коливальності за рахунок часу регулювання).
. Проектування фільтрів більш високих порядків виконується каскадним включенням біквадратних ланок, що гарантує не тільки стійкість системи, але і задані динамічні властивості (утримання перерегулювання, коливальності за рахунок часу регулювання).
Методи проектування рекурсивних фільтрів
§ Метод інваріантості імпульсної характеристики:
¨ починається з визначення  для аналогового фільтра;
для аналогового фільтра;
¨ узяття зворотного перетворення Лапласа для одержання імпульсної характеристики;
¨ Одержання z-перетворення  з дискретної імпульсної характеристики;
з дискретної імпульсної характеристики;
¨ z-перетворення визначає коефіцієнти фільтра;
¨ Повинний бути врахований ефект накладення спектрів.
§ Метод білінійного перетворення:
¨ інший метод для перетворення у  ;
;
¨ характеристики визначаються диференціальним рівнянням, що описує аналогову систему;
¨ не важливий ефект накладення спектра.
§ Метод погодженого z-перетворення:
¨ відображає у для фільтрів і з полюсами, і з нулями.
§ Методи САПР:
¨ алгоритм Флетчера-Пауела;
¨ здійснюються каскадуванням біквадратних ланок.
Оцінка швидкості обробки даних при реалізації НІХ фільтрів:
§ визначення кількості біквадратних ланок, необхідних для реалізації бажаної частотної характеристики;
§ множення цієї кількості на час виконання операції однією біквадратною ланкою;
§ результат (плюс додаткові операції) визначає мінімально припустимий період дискретизації  для роботи в реальному масштабі часу.
для роботи в реальному масштабі часу.
Резюме: порівняння КІХ- і НІХ-фільтрів. Вибір між КІХ- і НІХ-фільтрами може бути свого роду змаганням у проектуванні, але кілька основних керівних принципів можна визначити. Як правило, НІХ-фільтри більш ефективні, чим КІХ-фільтри, тому що вони вимагають меншої кількості пам'яті і меншої кількості операцій множення з накопиченням. НІХ-фільтри можуть бути розроблені, ґрунтуючись на попередньому досвіді проектування аналогових фільтрів. НІХ-фільтри можуть приносити проблеми нестійкості, але цього не відбувається, якщо синтезовані фільтри високого порядку реалізуються як системи, що складаються з послідовного включення каскадів другого порядку.
З іншого боку, КІХ-фільтри вимагають більшої кількості ланок і, відповідно, операцій множення з накопиченням для реалізації частотної характеристики з заданою частотою зрізу, але при цьому мають лінійну фазову характеристику. КІХ-фільтри працюють на кінцевому часовому інтервалі даних, тому, якщо частина даних зіпсована (наприклад, у результаті збоїв у роботі АЦП), КІХ-фільтр буде "дзенькотіти" тільки на часовому інтервалі, що відповідає N–1 відлікам. НІХ-фільтр, через наявність зворотного зв'язку, буде "дзенькотіти" значно більш тривалий термін часу.
| НІХ-фільтри | КІХ-фільтри |
| Більш ефективні Є аналоговий еквівалент Можуть бути нестабільними Нелінійна фазова характеристика Більше "дзенькіт" при наявності помилкових сигналів Доступні засоби САПР Децимація не впливає на ефективність | Менш ефективні Немає аналогового еквівалента Завжди стабільні Лінійна фазова характеристика Менше "дзенькіт" при наявності помилкових сигналів Доступні засоби САПР Децимація збільшує ефективність |
Рисунок 9.9. — Порівняльний аналіз КІХ та НІХ фільтрів
Якщо необхідні фільтри з крутим спадом і відчувається дефіцит у часі, відведеному для обробки, найкращим вибором є еліптичний НІХ-фільтр. Якщо число операцій множення з накопиченням не є надмірним і потрібна лінійна фаза, то повинний бути обраний КІХ-фільтр. Якісний порівняльний аналіз НІХ і КІХ фільтрів наведений на рис. 9.9.
Дата добавления: 2015-03-03; просмотров: 2372;