Математическое моделирование систем.
Корпус современного водоизмещающего судна, его двигатели, вспомогательные механизмы и устройства в основном изготовлены из специальных сталей, которые в значительной степени обладают магнитными свойствами, т.е. свойствами ферромагнитных материалов. Судостроительная сталь обладает свойствами как «твердого», так и «мягкого» в магнитном отношении железа. А это значит, что во время постройки судно приобретает остаточную намагниченность, которая сохраняется постоянной определенное время.
С другой стороны, судно имеет способность намагничиваться (или размагничиваться) в магнитном поле, которое действует на судно в данный момент. Постоянный судовой магнетизм и временная намагниченность мягкого железа создают в окружающем пространстве судовое магнитное поле. На любой магнитный прибор, помещенный на судно, действует не только магнитное поле Земли, но и магнитное поле судна, т.е. прибор находится под действием суммарного магнитного поля.
Таким образом, магнитная стрелка на судне устанавливается не в плоскости магнитного меридиана, а в плоскости действия вектора напряженности суммарного магнитного поля.
Величина девиации зависит от нескольких факторов:
Ø От расположения магнитных масс относительно компаса, т.е. от места установки компаса. В наилучших условиях находятся главные компасы, которые наиболее удалены от основных магнитных масс судна.
Ø От курса судна, так как напряженность судового магнитного поля является функцией курса.
Ø При крене судна появляется дополнительная девиация — креновая, знак которой зависит от стороны накренивания судна. На волнении креновая девиация раскачивает катушку в такт накрениваний судна.
Ø От района плавания в связи с изменением напряженности магнитного поля  при перемене широты.
при перемене широты.
Девиация магнитного компаса не остается постоянной при эксплуатации судна. Все виды девиации изменяются при перевозке грузов, обладающих собственным магнетизмом, а также после перемещения магнитных масс относительно компаса (после перестройки корпуса, надстроек и изменения положения оборудования). Она также зависит от состояния намагниченности судна и поэтому может измениться от перемагничивания судна при длительной стоянке в одном положении (в ремонте, на отстое и т.п.), при воздействии на судно сильных магнитных и электромагнитных полей (при электросварке, ударах молнии и т.д.), при сильных сотрясениях корпуса (во время плавания во льдах, при слеминге[1] в штормовую погоду, при столкновениях и т. п.).
Девиация компасов на стальном судне может достигать значительных величин — до нескольких десятков градусов. Суммарная магнитная сила (магнитного поля судна и поля Земли) в этом случае может оказаться недостаточной для надежной работы компаса. Указанные обстоятельства вызывают необходимость уменьшения величины девиации или, как принято называть, уничтожения девиации.
Принцип уничтожения девиации заключается в создании с помощью специальных компенсаторов (постоянных магнитов, брусков мягкого железа) магнитного поля, равного по величине и такого же характера, как судовое поле, но обратного по направлению. Магниты устанавливаются внутри нактоуза компаса в специальных каретках, закрепляемых на трубе девиационного прибора. Часть магнитов устанавливается параллельно диаметральной плоскости судна (продольные магниты), а часть — перпендикулярно (поперечные магниты). Креновая девиация обычно уничтожается при помощи вертикального магнита.
Уничтожение девиации производят на полигонах, имеющих необходимое оборудование (ориентиры, створы, палы). На судне все должно быть установлено и закреплено в походном положении. Особое внимание необходимо обратить на предметы и оборудование, расположенные недалеко от компасов. Положение подвижных конструкций и оборудования (например, мачт) должно быть оговорено в таблице девиации. Уничтожение девиации производят не реже 1 раза в год, а также по усмотрению капитана, например, в тех случаях, когда обнаружено несоответствие табличной девиации ее наблюдаемым величинам.
По целому ряду причин уничтожение девиации не может быть выполнено абсолютно точно. Такими причинами являются: случайные и систематические ошибки измерений, несовершенство применяемых приборов, а также методические неточности уничтожения девиации. Девиация, наблюдаемая у компасов после уничтожения всех видов девиации, называется остаточной. Ее величина не должна превышать у главных компасов — 3°, а у путевых — 5°.
[1] Слеминг (от англ. slam — хлопать) - явление удара днищевой части носовой оконечности корпуса о воду в процессе продольной качки судна при его движении на встречных волнах.
Математическое моделирование систем.
Основные понятия моделирования систем.
Процессы химической технологии — это сложные физико-химические системы, имеющие двойственную детерминированно-стохастическую природу, переменные в пространстве и во времени. Участвующие в них потоки вещества, как правило, многофазные и многокомпонентные. В ходе протекания процесса в каждой точке фазы и на границах раздела происходит перенос импульса, энергии, массы. Весь процесс в целом протекает в аппарате с конкретными геометрическими характеристиками, оказывающими, в свою очередь, влияние на характер этого процесса.
Под математическим моделированием понимают изучение свойств объекта на математической модели. Его целью является определение оптимальных условий протекания процесса, управление им на основе математической модели и перенос результатов на объект.
Основным понятием метода математического моделирования является понятие математической модели. Математической моделью называется приближенное описание какого-либо явления или процесса внешнего мира, выраженное с помощью математической символики.
Математическое моделирование включает три взаимосвязанных этапа: 1) составление математического описания изучаемого объекта; 2) выбор метода решения системы уравнений математического описания и реализация его в форме моделирующей программы; 3) установление соответствия (адекватности) модели объекту.
На этапе составления математического описания предварительно выделяют основные явления и элементы в объекте и затем устанавливают связи между ними. Далее, для каждого выделенного элемента и явления записывают уравнение (или систему уравнений), отражающее его функционирование. Кроме того, в математическое описание включают уравнения связи между различными выделенными явлениями. В зависимости от процесса математическое описание может быть представлено в виде системы алгебраических, дифференциальных, интегральных и интегро-дифференциальных уравнений.
Этап выбора метода решения и разработки моделирующей программы подразумевает выбор наиболее эффективного метода решения из имеющихся (под эффективностью имеются в виду быстрота получения и точность решения) и реализацию его сначала в форме алгоритма решения, а затем — в форме программы, пригодной для расчета на ЭВМ.
Построенная на основе физических представлений модель должна верно качественно и количественно описывать свойства моделируемого процесса, т.е. она должна быть адекватна моделируемому процессу. Для проверки адекватности математической модели реальному процессу нужно сравнить результаты измерений на объекте в ходе процесса с результатами предсказания модели в идентичных условиях.
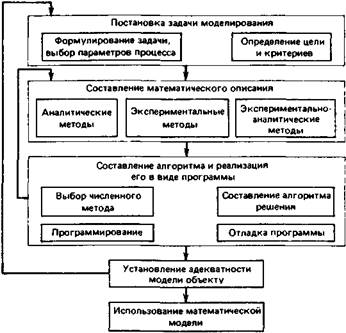
Рис. 1. Этапы разработки математической модели
Этап установления адекватности модели является заключительным в последовательности этапов, выполняемых при ее разработке. На рис. 1 изображена общая схема разработки математической модели.
При построении математической модели реальное явление упрощается, схематизируется и полученная схема описывается в зависимости от сложности явлений с помощью того или иного математического аппарата.
От правильности учета в модели характерных черт рассматриваемого процесса зависят успех исследования и ценность полученных результатов моделирования.
В модели должны быть учтены все наиболее существенные факторы, влияющие на процесс, и вместе с тем она не должна быть загромождена множеством мелких, второстепенных факторов, учет которых только усложнит математический анализ и сделает исследование либо чрезмерно громоздким, либо вообще нереализуемым.
Метод математического моделирования применяют при изучении свойств процессов, для которых имеется достаточно точное математическое описание. В зависимости от степени полноты математического описания можно выделить два предельных случая: а) известны полная система уравнений, описывающая все основные стороны моделируемого процесса, и все числовые значения параметров этих уравнений; б) полное математическое описание процесса отсутствует. Этот второй случай типичен для решения кибернетических задач, в которых приходится иметь дело с управлением процессами при наличии неполной информации об объекте и действующих на него возмущениях. При отсутствии достаточной информации об исследуемых явлениях их изучение начинается с построения простейших моделей, но без нарушения основной (качественной) специфики исследуемого процесса.
Аналитическое моделирование – это моделирование при котором функционирование элементов системы записано в виде функциональных соотношений или логических условий.
Эта модель исследуется следующими методами:
1) аналитически, когда стремятся получить явные зависимости искомых характеристик.
2) численно, когда нельзя решить уравнения аналитически, и получают числовые результаты решения при конкретных начальных данных.
3) качественно, когда нет решения в явном виде, но можно найти некоторые свойства решения (например устойчивость).
Имитационное моделирование – это моделирование при котором воспроизводится процесс функционирования системы во времени, с сохранением логической структуры и с последовательности протекания во времени, что дает возможность оценить характеристики системы.
Дата добавления: 2015-03-03; просмотров: 1168;