Изодромный регулятор гидравлического типа.
 ИЗОДРОМ (от изо... и греч. dromos - бег) - механич., гидравлич., пневматич. или электрич. устройство, обеспечивающее гибкую обратную связь (с коэфф. обратной связи, меняющимся во времени) в автоматич. регуляторах. И. действует лишь в течение переходного процесса. Представляет собой, напр., механизм, состоящий из катаракта, пружины и системы рычагов, или дифференцирующую цепь, включённую в цепь обратной связи.
ИЗОДРОМ (от изо... и греч. dromos - бег) - механич., гидравлич., пневматич. или электрич. устройство, обеспечивающее гибкую обратную связь (с коэфф. обратной связи, меняющимся во времени) в автоматич. регуляторах. И. действует лишь в течение переходного процесса. Представляет собой, напр., механизм, состоящий из катаракта, пружины и системы рычагов, или дифференцирующую цепь, включённую в цепь обратной связи.
ИЗОДРОМНЫЙ РЕГУЛЯТОР автоматич. регулятор с гибкой обратной связью (см. Изодром). К И. р. относят, напр., механич. регулятор частоты вращения (см. рис.), гидравлич. регулятор уровня жидкости, пневматич. регулятор темп-ры, электрич. регулятор напряжения генератора перем. тока. Наличие в регуляторе гибкой обратной связи позволяет существенно повысить качество регулирования (по сравнению с регуляторами без иэодрома).
Схема изодромного регулятора частоты вращения: 1 - муфта центробежного регулятора; 2 - пружина изодрома; 3 - цилиндр с вязкой жидкостью; 4 - поршень; 5 - рычаг; 6 - золотник; 7 - двигатель; 8 - сервомотор; 9 - заслонка; 10 - поршень сервомотора.
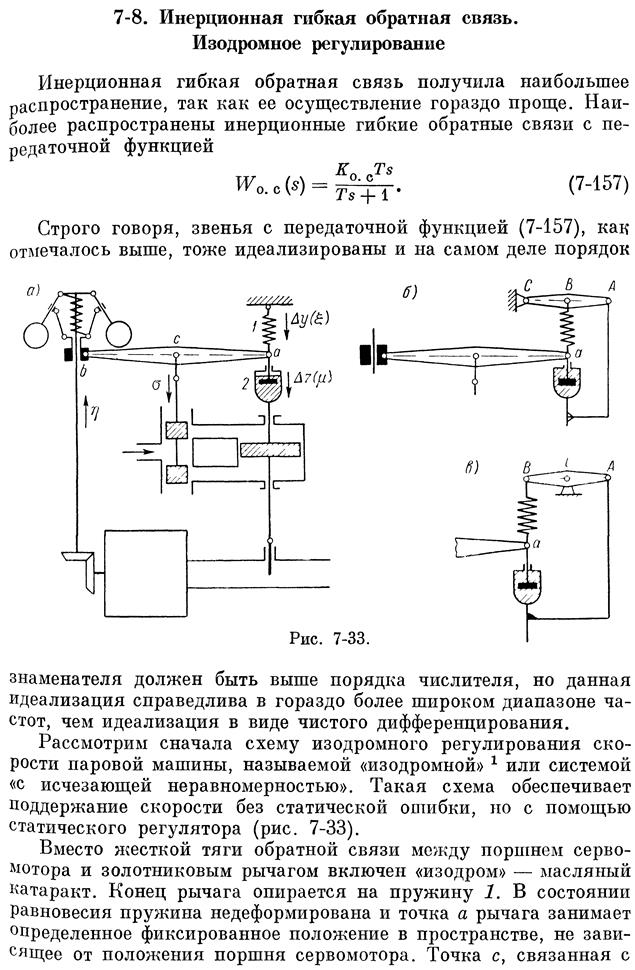
Далее идет «умная» информация, но это единственное описание изодромного регулирование гидравлического типа (по ТАУ)

Изодромные ПИ-регуляторы применяют при быстро и резко меняющихся нагрузках и при регулировании объектов как с самовыравниванием, так и без него, с малым коэффициентом емкости, а также при наличии передаточного запаздывания.
 , где kр – коэффициент усиления регулятора.
, где kр – коэффициент усиления регулятора.
 Tиз – время изодрома.
Tиз – время изодрома.
 - зависимая формула, Tи – время интегрирования
- зависимая формула, Tи – время интегрирования
Изодромные ПИД-регуляторы с предварением называют также пропорционально-интегрально-дифференциальными регуляторами. В них предварение осуществляется путем введения в закон регулирования составляющей, зависящей от скорости изменения входной величины.
Дополнительное воздействие по скорости отклонения регулируемой величины оказывает положительное влияние на процесс регулирования в объектах со значительным запаздыванием. Благодаря применению дополнительного воздействия по производной время переходного процесса и амплитуда колебаний регулируемой величины в переходном режиме существенно уменьшаются за счет эффекта предварения.
ПИД-регулятор можно представить как параллельное соединение 3 звеньев, безынерционного, интегрирующего и идеального дифференцирующего.
ПИД-регуляторы применяют для регулирования объектов, в которых наблюдаются частые и глубокие возмущающие воздействия.
Пропорциональные регуляторы с предварением, или ПД-регуляторы, позволяют улучшить переходный процесс при статическом регулировании. Они осуществляют регулирование не только в зависимости от величины нарушения равновесия в объекте регулирования, но и от скорости протекания возмущающего воздействия, т. е. регулирование идет по величине возмущения и первой производной от него.
Дата добавления: 2015-02-19; просмотров: 6044;