Теоретическое введение. Привод – энергосиловое устройство, приводящее в движение машину или механизм
Привод – энергосиловое устройство, приводящее в движение машину или механизм. Он состоит из источника энергии, передаточного механизма и аппаратуры управления. Источником энергии может служить электрический, гидравлический, пневматический или тепловой двигатель. В этом случае привод называется электрическим, гидравлическим и т.д. Бывают и ручные приводы, например: швейная машина, велосипед.
В машиностроении, как правило, применяются электроприводы, которые подразделяются по виду передаточного механизма: зубчатые, червячные, ременные и цепные. В состав привода могут быть включены как открытые, так и закрытые механические передачи. Общая схема перечисленных приводов представляется в виде:

Основными входными и выходными параметрами механического привода являются: мощность N, кВт; частота вращения n, мин-1; крутящий момент Т, Нм. Потери мощности от электродвигателя к исполнительному механизму характеризует коэффициент полезного действия (КПД) привода, который определяется как произведение КПД составляющих элементов и передач: 
Для понижающих приводов частота вращения уменьшается на величину передаточного отношения привода:  . Значение крутящего момента возрастает от вала электродвигателя к приводному валу исполнительного механизма:
. Значение крутящего момента возрастает от вала электродвигателя к приводному валу исполнительного механизма:
 .
.
Установка привода на общем фундаменте и монтаж составных его частей – серьезная техническая задача. Для соединения валов отдельных узлов привода используют муфты, которые по классификации бывают: неуправляемые (глухие, упругие, компенсирующие жесткие); управляемые (кулачковые, фрикционные); автоматические (центробежные, предохранительные, свободного хода). Подбор муфты проводят по основной характеристике: [Т] ≥ Тj, где [Т] – допускаемый крутящий момент передаваемый муфтой; Тj – крутящий момент на соединяемых валах. Муфты стандартизованы и после определения основной характеристики их уточняют по диаметру соединяемых валов и предельно допустимой частоте вращения.
 |

Рис. 1.1. Несоосности валов
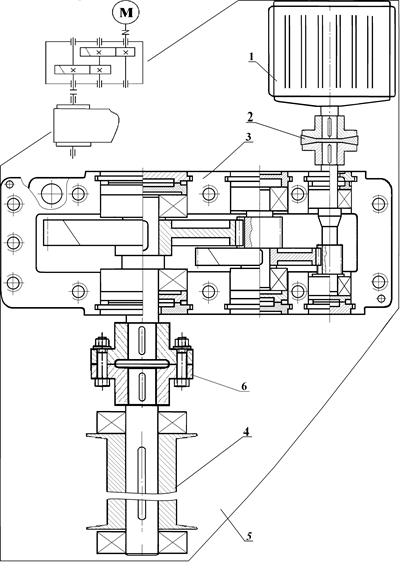
Рис. 1.2. Привод ленточного транспортера:
1 – электродвигатель; 2 – муфта упругая; 3 – редуктор;
4 – барабан; 5 – рама; 6 – муфта фланцевая
При монтаже привода на раму возможны три вида отклонений от правильного взаимного расположения соединяемых валов (рис. 1.1, а):  – продольное (осевое) смещение;
– продольное (осевое) смещение;  – радиальное;
– радиальное;  – угловое. На практике встречается комбинация всех трех отклонений (рис. 1.1, б). Компенсация вредного влияния несоосности валов достигается, например, за счет деформации отдельных деталей (муфты упругие) или за счет подвижности жестких деталей (компенсирующие жесткие детали).
– угловое. На практике встречается комбинация всех трех отклонений (рис. 1.1, б). Компенсация вредного влияния несоосности валов достигается, например, за счет деформации отдельных деталей (муфты упругие) или за счет подвижности жестких деталей (компенсирующие жесткие детали).
Дата добавления: 2015-02-19; просмотров: 1172;