Разворот на горке
Разворот на горке применяется для быстрого разворота после набора высоты на горке. Он представляет собой последовательное соединение двух фигур: горки и разворота на заданный угол в конце горки. Поэтому техника выполнения первой половины фигуры, режим полета, распределение и переключение внимания такие же, как и при выполнении горки.
Вывод из горки целесообразно начинать по достижении скорости 120 - 130 км/ч с одновременным вводом вертолета в разворот. Ввод в разворот с меньших скоростей не рекомендуется по той причине, что в процессе его выполнения скорость полета продолжает уменьшаться и может выйти за пределы минимально допустимой. Разворот на горке выполняется при постоянном значении общего шага несущего винта.
Для ввода вертолета в разворот на горке ручку управления плавно отклонить от себя и в сторону разворота. Одновременно в ту же сторону координировано отклонить педаль. Темп действия рычагами управления должен быть таким, чтобы угол тангажа уменьшился до нуля за время 6 - 7 с (с угловой скоростью до 3°/с), а крен за это время достиг 30°. Как только фонарь кабины займет положение, соответствующее развороту в горизонтальной плоскости, зафиксировать его, перевести взгляд в кабину, проверить величины крена и скорости, отсутствие скольжения и при необходимости исправить отклонения.
Как и на форсированном развороте, при выполнении левого разворота на горке вертолет имеет тенденцию к увеличению крена, при выполнении правого разворота — к уменьшению крена. Стремление вертолета изменить крен парировать на левом вираже отклонением ручки управления в сторону, противоположную развороту, на правом вираже — в сторону разворота, добиваясь координации разворота соответствующим отклонением педали.
Внимание при вводе в разворот обращать на координацию (одновременность уменьшения угла тангажа, создания крена и углового вращения), определение момента отклонения рычагов управления для фиксирования заданного крена и угла тангажа. В процессе разворота по положению остекления кабины вертолета относительно горизонта постоянно контролировать крен, тангаж и угловую скорость вращения. При необходимости дополнительного контроля взгляд периодически переносить на приборы. В процессе разворота проверять, свободно ли воздушное пространство в направлении разворота.
За 15 - 20° до заданного курса (намеченного ориентира) координированным отклонением ручки управления и педали вывести вертолет из разворота в горизонтальный полет на скорости не менее 70 км/ч.
При выводе из разворота оценивать положение горизонта относительно остекления кабины, одновременность уменьшения крена, углового вращения, координацию, скорость, высоту, курс (ориентир).
После разворота проверить режим работы силовой установки и систем вертолета, осмотреть воздушное пространство и установить скорость и высоту, необходимые для выполнения следующей фигуры.
Разворот на горке выполняется практически координировано с малыми значениями поперечной перегрузки (углов скольжения) и представляет собой восходящую неустановившуюся спираль в конце горки с разворотом до 180° и выходом в горизонтальный полет в конце разворота. В процессе разворота вертолет достаточно устойчив и хорошо управляем.
При выполнении разворота на горке с уменьшением скорости на левом развороте менее 80 км/ч появляется неустойчивость в показаниях указателя скорости, особенно при развороте со скольжением.
При выполнении маневрирования снятие нагрузки с органов управления кнопкой ТРИММЕР рекомендуется только на прямолинейных участках.
Планирование на режиме самовращения несущего винта
Режимом самовращения называется такой режим полета, при котором несущий винт приводится во вращение аэродинамическими силами, возникающими в результате взаимодействия лопастей с набегающим потоком воздуха без подвода мощности двигателей. На этом режиме вращение несущего пинта осуществляется воздушным потоком, возникающим при снижении вертолета под действием силы тяжести.
Для выяснения физической сущности режима самовращения рассмотрим работу элемента лопасти несущего винта и действующие на него силы при вертикальном снижении (рис. 22).
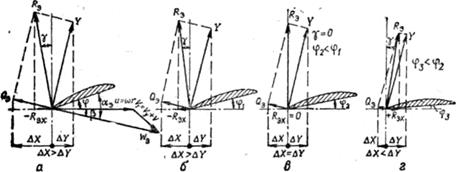
Рисунок 22. Схема сил, действующих на элемент лопасти на режиме самовращения: а - общая; б - на замедленном режиме; в - на установившемся режиме; г - на ускоренном режиме.
Под воздействием потока воздуха возникает полная аэродинамическая сила Rэ,. Ее составляющая Y, направленная перпендикулярно к направлению суммарного потока воздуха Wэ является подъемной силой, а составляющая Qэ направленная по суммарному потоку,— силой лобового сопротивления (рис. 22, а).
Силы, возникающие на элементе лопасти, зависят от величины и направления суммарной скорости Wэ его встречи с воздушным потоком, т. с. от угла атаки элемента аэ, равного сумме установочного угла элемента лопасти φ, и угла притекания потока воздуха β. На рис.22, б, в, г показаны три возможных направления полной аэродинамической силы Rэ в зависимости от величины угла атаки.
Когда сила Rэ наклонена назад (рис. 22, б), сила ∆Х как проекция составляющей Qэ, на плоскость вращения будет больше силы ∆Y — проекции составляющей Y на эту же плоскость. В результате в плоскости вращения будет действовать неуравновешенная сила, замедляющая вращение элемента. Эта тормозящая сила возникает вследствие большого установочного угла элемента лопасти (общего шага несущего винта).
Когда сила Rэ параллельна оси вращения (рис. 22, в), ее составляющие Y и Qэ дают равные проекции на плоскость вращения, т. е. ∆Х=∆Y. В плоскости вращения силы оказываются уравновешенными, элемент лопасти вращается по инерции с постоянной частотой вращения. Это режим установившегося самовращения.
В третьем случае (рис. 22, г) сила Rэ несколько наклонена вперед по вращению. В результате сила ∆Y больше силы ∆Х, и в плоскости вращения будет действовать неуравновешенная сила, ускоряющая движение элемента. Эта ускоряющая сила может возникнуть, при условии, если общий шаг несущего винта меньше, чем при установившемся самовращении.
Крутка лопасти и наличие разных скоростей обтекания по размаху являются причиной того, что концевые сечения лопасти работают, как правило, в условиях замедленного самовращения, а средние и корневые — в условиях ускоренного самовращения.
При планировании на режиме самовращения по наклонной траектории работа лопастей несущего винта в условиях косого обтекания сильно усложнена. Вследствие того что в азимуте 270° прирост угла атаки ∆аэ больше чем в азимуте 90°, изменяется и наклон полной аэродинамической силы Rэ в азимуте 90° она отклоняется назад, в азимуте 270° — вперед. Маховые движения лопастей несущего винта способствуют еще большему отклонению силы Rэ в азимуте 90° назад и в азимуте 270° вперед. Таким образом, наступающая лопасть создает тормозящий момент, достигающий наибольшего значения в азимуте 90°-, где вертикальная скорость взмаха вверх максимальна. Отступающая лопасть создает крутящий момент, наибольшая величина которого достигается в азимуте 270°, где скорость взмаха вниз максимальна. Лопасти поочередно в азимуте 180—360° раскручивают винт (являются ведущими), а в азимуте 0—180° тормозят вращение, в целом же винт работает в условиях установившегося самовращения. Частота вращения несущего винта nнв регулируется шагом φнв; чем меньше φнв, тем больше nнв. На различных высотах вследствие изменения массовой плотности воздуха значения общего шага, при которых обеспечивается установившийся режим самовращения, будут разными. С увеличением высоты (уменьшением массовой плотности воздуха ρ) потребное значение общего шага увеличивается примерно на 1° на каждые 1000 м.
Из схемы сил, действующих на вертолет при снижении на режиме самовращения несущего винта (рис. 23), видно, что условием постоянства угла планирования является равенство подъемной силы Y и составляющей силы тяжести вертолета G1, направленной перпендикулярно к траектории движения.
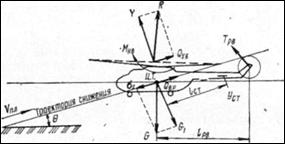
Рисунок 23. Схема сил, Схема сил, действующих на вертолет при снижении на режиме самовращения несущего винта
Скорость планирования будет постоянной при условии, если сумма составляющей полной аэродинамической силы винта Qхв, направленной параллельно набегающему потоку, и вредного сопротивления вертолета Qвр будет уравновешена составляющей силы тяжести G2, которая направлена по траектории движения..
Реактивного момента на режиме самовращения несущего винта нет. Однако в результате трения в трансмиссии и имеющейся механической связи с рулевым винтом несущий винт при своем вращении увлекает за собой корпус вертолета, и вертолет разворачивается в направлении вращения несущего винта (вправо). Этот момент принято называть моментом несущего винта Мнв. Для предотвращения разворота необходим противодействующий момент от тяги рулевого винта. Так как направление разворота по отношению к моторному полету изменилось на противоположное, то и направление силы тяги рулевого винта и момента Трвlрв также должно быть изменено на противоположное.
Таким образом, условием сохранения заданного направления полета будет равенство моментов несущего и рулевого винтов.
Полет на режиме самовращения несущего винта можно выполнить как с полностью введенной вправо, так и с полностью убранной влево коррекцией газа двигателей.
При самовращении в зоне полет выполняется с полностью убранной влево коррекцией.
На режиме самовращения автомат частоты вращения выключается из работы, поэтому частоту вращения несущего винта необходимо сохранять изменением положения рычага ШАГ-ГАЗ. В том случае, если снижение выполнялось с убранной влево коррекцией, необходимо перед выводом из снижения вначале ввести коррекцию, а затем увеличить общий шаг. Рекомендуемая частота вращения несущего винта 92— 96%, минимально допустимая — 89%, минимально допустимая в момент приземления — 70%.
Снижение на режиме самовращения несущего винта с работающими двигателями выполнять на приборных скоростях:
· на высоте 2000 м и более— 100—120 км/ч;
· на высоте менее 2000 м—120—190 км/ч (на Ми-8Т — 90—200 км/ч).
Вертикальная скорость снижения зависит от выбранной скорости планирования и равна 10—12 м/с. Наименьшая вертикальная скорость соответствует скорости планирования ПО— 120 км/ч и равна 10 м/с.
Наивыгоднейшая скорость планирования по прибору, соответствующая максимальной дальности планирования на высотах менее 2000 м, 180 км/ч.
Перед выполнением снижения на режиме самовращения несущего винта в зоне нужно развернуть вертолет против ветра, установить режим горизонтального полетала скорости 120 км/ч. Снять нагрузки с органов управления и убедиться в нормальной работе двигателей и трансмиссии. После этого уменьшить общий шаг несущего винта до минимального значения и убедиться, что частота его вращения составляет 95±2%. Стремление вертолета развернуться вправо и опустить нос парировать отклонениями левой педали и ручки управления влево. Рукоятку коррекции повернуть влево до упора. После перехода на режим самовращения изменением положения рычага ШАГ-ГАЗ сохранять частоту вращения несущего винта в допустимых пределах,
Развороты на режиме самовращения несущего винта выполняются с креном не более 20°. При этом нужно иметь в виду, что эффективность органов управления в этом случае меньше, чем в моторном полете (на правом развороте отклонена левая педаль), а увеличение крена более 15° приводит к значительному росту вертикальной скорости снижения. Кроме того, при вводе в разворот незначительно увеличивается частота вращения несущего винта. Объясняется это следующим. При прямолинейном планировании подъемная сила уравновешивает часть силы тяжести вертолета, а при вводе в разворот она еще и искривляет траекторию движения. Поэтому вертикальная составляющая подъемной силы оказывается меньше части силы тяжести вертолета, которую она уравновешивала до ввода в разворот. В результате этого увеличиваются угол планирования, вертикальная скорость снижения и частота вращения несущего винта, что приводит к увеличению тяги (подъемной силы) винта. Вертикальная составляющая подъемной силы будет теперь равна части силы тяжести вертолета, дальнейшее увеличение вертикальной скорости и частоты вращения прекратится.
Частота вращения несущего винта при выполнении разворотов обычно не выходит за допустимые пределы и после вывода из разворота восстанавливается. Поэтому уменьшать частоту вращения несущего винта увеличением общего шага не рекомендуется.
Для вывода из режима самовращения плавно ввести коррекцию газа вправо, затем отклонить рычаг ШАГ-ГАЗ вверх, не допуская уменьшения частоты вращения несущего винта менее 92%, и установить заданный режим работы двигателей. Увеличение темпа отклонения рычага ШАГ-ГАЗ может привести к уменьшению частоты вращения несущего винта ниже минимально допустимой.
Вывод из режима самовращения должен быть закончен на высоте не менее 300 м.
Дата добавления: 2015-02-10; просмотров: 1615;