Декодерами в измерительных системах являются преобразователи код—код.
Приведение измерительной информации к виду, удобному для дальнейшей переработки, рассмотрим на примере преобразования кода Грея, непригодного для вычислительных операций, в двоичный код.
Преобразователь состоит из генератора тактовых импульсов ГИ (см. рис. 181) и триггера Тг, который управляется
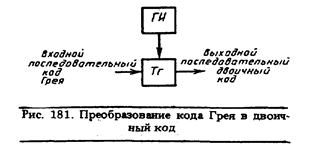
импульсами кода Грея. Для преобразования используется совпадение знаков старшего разряда у кода Грея и у обычного двоичного кода. Последовательность работы преобразователя поясняется на примере преобразования числа 8 в коде Грея 1100 в число 8 в двоичном коде 1000:
| Тактовые импульсы Импульсы кода Грея, управляющие нормально закрытым триггером Состояние триггера Импульсы двоичного кода на выходе схемы | 
|
Первый импульс кода Грея старшего разряда открывает закрытый триггер, и первый тактовый импульс проходит на выход, образуя импульс старшего разряда двоичного кода. Второй импульс кода Грея закрывает триггер, который остается в дальнейшем закрытым, т.к. в остальных двух младших разрядах числа 8 по коду Грея импульсов нет. Поэтому все остальные тактовые импульсы через .закрытый триггер не проходят, и на выходе получается двоичный последовательный код числа 8.
Приведение измерительной, информации к виду, удобному для восприятия человеком в цифровой форме, рассмотрим на примере преобразования семиразрядного кода Хэмминга (см. пример 80) в десятичный код.
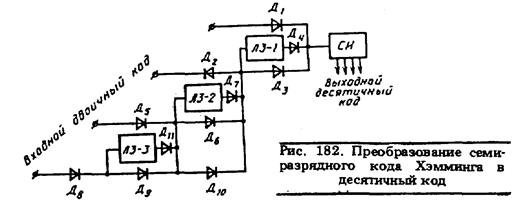
Схема, поясняющая принцип действия преобразователя, приведена на рис. 182. Работа устройства основана на преобразовании импульсов, поступающих по каналам, соответствующим информационным разрядам кода Хэмминга, в пачки импульсов. Число импульсов в пачке равно числу двоичных единиц в разряде. Пачки импульсов поступают в счетчик импульсов СИ, в котором импульсы подсчитываются и результат выдается в десятичной системе счисления.
Рассмотрим преобразование кодовой комбинации 0110011 в семиразрядном коде Хэмминга, построенном в примере 80; в десятичный код.
Импульс, соответствующий 1 в младшем информационном разряде, через диод Д1 поступает в счетчик импульсов СИ. Импульс, соответствующий 1 в следующем разряде, превращается в пачку из двух импульсов. Первый изних через диоды Д2 и Д3 проходит в счетчик непосредственно, а второй, образующийся на выходе линии задержки ЛЗ-1, следует за ним через диод Д4 с запаздыванием по времени на Dt. В следующем информационном разряде стоит 0, поэтому через диод Д5 импульс в схему не поступает. Затем следует проверочный разряд, не подключенный к преобразователю. В старшем информационном разряде стоит 1. Соответствующий импульс превращается в пачку из 8 импульсов следующим образом. Через диоды Д8, Д9, Д10 и Д3 он проходит в счетчик непосредственно. Заним через диод Д4 следует импульс, задержанный на Dt. Сформировавшийся на выходе линии задержки ЛЗ-2 импульс запаздывает на 2Dt .Он опять-таки превращается в два импульса, первый из которых через диоды Д7 и Д3 поступает в счетчик непосредственно, а второй, образующийся на выходе линии задержки ЛЗ-1, следует за ним через диод Д4 с запаздыванием по времени на Dt. По отношению к самому первому импульсу он запаздывает, следовательно, уже на 3Dt. Импульс, сформировавшийся на выходе линии задержки ЛЗ-3, запаздывает по отношению к первому на 4 Dt. Он превращается в 4 импульса, первыйиз которых поступает в счетчик непосредственно через диоды Д11,Д6 и Дз, второй — с выхода линии задержки ЛЗ-1 через диод Д4 третий — с выхода линии задержки ЛЗ-2 через диоды Д7 и Д3 и четвертый, с формировавшийся из предыдущего после задержки на время Dt в линии задержки ЛЗ-1, — через диод Д4 . Таким образом, показание счетчика в десятичной системе счисления будет равно 11, что соответствует кодовой таблице, приведенной в примере 80.
Если измерительная информация должна быть представлена в аналоговой форме, то возникает задача восстановления непрерывного сигнала (см. рис. 162, а) по ряду его дискретных значений (рис. 162, б). Если дискретизация была выполнена в соответствии с теоремой В.А. Котельникова, то наиболее просто эта задача решается с помощью низкочастотного фильтра. Функция 
является откликом идеальногонизкочастотного фильтра на единичный импульс. Для восстановления сигнала Х(t) (см. рис. 163) необходимо подавать на вход фильтра с верхней граничной частотой wB последовательность коротких импульсов с амплитудами, равным мгновенным значениям сигнала в соответствующие моменты времени. Тогда на нагрузке будут суммироваться члены ряда В.А. Котельникова (см. рис. 163), обеспечивая тем самым восстановление сигнала. Качество восстановления естественно, будет зависеть от соблюдения множества условий, таких как правильный выбор шага квантования по времени Dt, точность воспроизведения в импульсном режиме мгновенных значений сигнала, близость амплитудно-частотной характеристики фильтра к прямоугольной, а фазочастотной — к линейной и мн. др.
Если условия теоремы В.А. Котельникова не выполняются (например, квантование по времени выполнено с неравномерным шагом), то в качестве воспроизводящих используются другие функции. С одной стороны они должны обеспечивать необходимую точность воспроизведения сигнала при минимальном числе членов разложения, а с другой — допускать возможность простой технической реализации. Последнему требованию удовлетворяют прежде всего степенные полиномы.
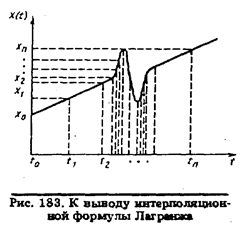 Задача - восстановления сигнала с помощью полинома n-й степени ставится следующим образом. Пусть известны значения сигнала C0, X1, Х2 , . .. Хn в моменты времени t0 ,t1 ,t2 , ... , tn (см. рис. 183). Требуется найти такой непрерывный сигнал Х(t), который в моменты времени tj принимал бы значения XJ .
Задача - восстановления сигнала с помощью полинома n-й степени ставится следующим образом. Пусть известны значения сигнала C0, X1, Х2 , . .. Хn в моменты времени t0 ,t1 ,t2 , ... , tn (см. рис. 183). Требуется найти такой непрерывный сигнал Х(t), который в моменты времени tj принимал бы значения XJ .
Найдем прежде всего непрерывную функцию, принимающую значение 1 в момент времени t0, и равную нулю во все остальные моменты времени ti. Легко проверить, что такой функцией будет дробь
в которой при t = t0 числитель и знаменатель оказываются совершенно идентичными, а в любой другой момент времени ti, один из сомножителей в числителе обращается в ноль. Домножив эту функцию на Х0, получим непрерывный сигнал

принимающий значение Х0 в момент времени t0 , и равный нулю во все остальные моменты времени ti .
Поступая по аналогии, можно сформировать сигналы
принимающиезначения Xj в моменты времени tj, и равные нулю во все остальные дискретные моменты времени ti ≠ tj . Искомый сигнал Х(t) будет равен сумме этих сигналов
так как в каждый из моментов времени tj принимает значение Xj.
Формула
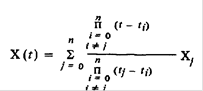
называется интерполяционной формулой Лагранжа и представляет собой полином n-й степени. На практике обычно интерполируют сигнал между двумя соседними дискретными значениями. В этом случае п = 1, и интерполяционный полиномимеет вид
или, после преобразований,

где а =  ; b=
; b=  . Это уравнение прямой,
. Это уравнение прямой,
проходящей через точки с координатами (t0,Xо) и (t1,Xi). Такая интерполяция называется линейной. Пример восстановления сигнала методом линейной интерполяции показан на рис. 184.
При степени полинома п = 0 интерполяция фактически превращается в экстраполяцию, так как в этом случае


Пример восстановления сигнала таким способом в каждый дискретный момент времени tj .показан на рис. 185. В измерительной технике этот способ восстановления реализуется с помощью разнообразных преобразователей код—аналог.
Дата добавления: 2015-02-05; просмотров: 1236;