Расчет и построение частной паспортной диаграммы судна с винтом регулируемого шага при постоянной частоте вращения гребного винта
Для построения паспортной диаграммы судна с ВРШ, работающего при переменой частоте вращения винта, в общем случае потребуется значительное количество показателей (Ne, H/D, n, v), характеризующих согласование между собой режимы работы ГД и ВРШ. Для этой цели обычно используют универсальную ходовую характеристику судна — зависимость мощности ГД Ne от скорости судна v при различных частотах вращения винта п и его шагового отношения H/D выполненную для определенных условий плавания судна.
Построение такой универсальной ходовой характеристики может быть сделано на основании значительного количества испытаний для получения значений Ne, H/D, n, v в различных условиях работы судна. Трудоемкость выполнения таких испытаний весьма высока и не всегда имеются условия для их проведения.
Для транспортных морских судов в силу специфики их работы можно ограничиться рассмотрением совместного управления ГД и ВРШ при постоянной частоте вращения винта. Это намного упрощает задачу построения паспортной диаграммы судна. В таком варианте работы ГД с ВРШ при n=const назначение режима пропульсивной установки осуществляется путем изменения шагового отношения H/D, т.е. разворотом лопастей винта. Для эксплуатационных условий работы транспортного судна в этом случае можно с достаточной точностью принять зависимость изменения скорости движения судна v прямо пропорциональной величине шага винта Н или шаговому отношению H/D, т.е. v/Н= const.
Практика и данные испытаний установок с ВРШ подтверждают справедливость такого допущения в диапазоне эксплуатационных скоростей движения судна.
3.2.1. Для расчета необходимых величин для построения паспортной диаграммы судна с ВРШ исходными данными служат:
номинальная частота вращения nсн, с-1;
удельный расход топлива Ве, кг/кВт·ч;
эффективный КПД ηе..
3.2.2. Расчет паспортной диаграммы следует начинать с определения относительной поступи гребного винта λР, взяв за базовый известный режим работы судна в грузу, при этом из паспортных данных судна берем:
vГ — скорость судна в грузу, узл;
п — частота вращения ГВ на номинальном режиме работы ГД, с-1. Относительную поступь ГВ определяем по формуле:

где ω — коэффициент попутного потока определяется из выражений:
■ ω = 0,5 δ - 0,05 — для одновинтовых судов;
■ ω = 0,55 δ — 0,20 — для двухвинтовых судов,
Здесь δ — коэффициент полноты корпуса судна.
3.2.3 Затем задаемся несколькими значениями λР, при этом одно значение λР берем больше определенного λРР для расчетного режима, а два - три значения λР меньше его с учетом того, чтобы охватить весь возможный диапазон режимов работы пропульсивного комплекса. Ориентировочно можно рекомендовать диапазон изменения λР от 0,75 до 1,15 от расчетного значения λРР.
3.2.4.Далее задаемся рядом значений (не менее четырех) шагового отношения H/D меньше величины расчетного шагового отношения H/D < (H/D)Р, с учетом охвата всего поля возможных нагрузочных режимов работы ГД. Ориентировочно можно рекомендовать задаваться величинами H/D в пределах 0,7...1,0 расчетного шагового отношения (H/D)Р.
3.2.5. Для всех выбранных значений относительной поступи λР и шагового отношения винта H/D, учитывая соотношение v/H = const при n=const, рассчитываем скорость судна v в узлах по формуле:
где постоянную с1 находим из выражения для известной из паспортных данных скорости судна в грузу

Здесь индексы «р» у всех величин соответствует расчетному режиму при движении судна в грузу.
3.2.6. Выполняем расчет мощности ГД по закону винтовой характеристики при движении судна в грузу (расчетная номинальная винтовая характеристика), используя кубическую зависимость изменения мощности от скорости движения судна Ne = c2 v3, где постоянную с2 определяем из известных судовых паспортных данных Nен = с2υГ3, откуда сг = Nен / υГ3.
3.2.7. Для выполнения дальнейших расчетов, необходимых при построении паспортной диаграммы пропульсивной установки, находим по кривым действия гребного винта (по Z и θ) безразмерное коэффициенты момента k2 для всех принятых значений относительной поступи λР и шагового отношения H/D.
Производим расчет определения мощности ГД Nе для всех принятых значений λР и H/D по формуле, взятой из теории гребных винтов:
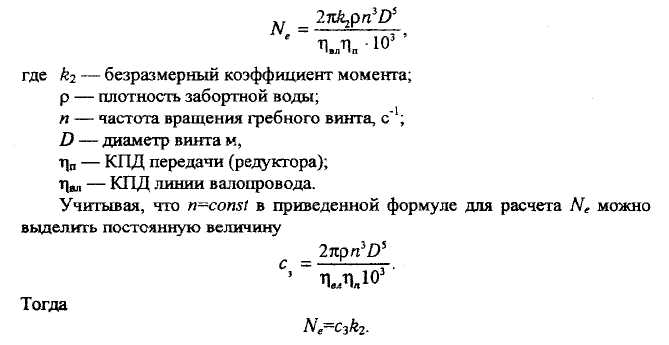
Схема вышеприведенных расчетов Ne сведена в табл. 3.1.
3.2.8.По результатам расчетов строим графики изменения эффективной мощности ГД в зависимости от скорости движения судна v и шагового отношения винта H/D при постоянных λР (винтовые характеристики) и постоянных H/D (нагрузочные характеристики).
3.2.9.Для проведения расчетов и построения ходовой характеристики судна, показывающей зависимость изменения полезной тяги винта Ре от скорости судна v и величины шагового отношения винта H/D, находим по кривым действия ГВ (по Z и θ) безразмерные коэффициенты упора k1 для всех принятых значений относительной поступи λР и шагового отношения H/D.
3.2.10.Производим расчет определения полезной тяги винта Ре для всех принятых значений λР и H/D по формуле, взятой из теории движителей,
Ре =k1ρn2D4(1-t)·10-3 кH,
где k1 — безразмерный коэффициент упора ГВ;
t— коэффициент засасывания, который можно определить по следующему выражению:
t = 0,60 (1 + 0,67 ω) ω — для одновинтовых судов,
t = 0,80 (1 + 0,25 ω) ω — для двухвинтовых.
Здесь ω — коэффициент попутного потока.
При постоянных величинах частоты вращения ГВ и коэффициента засасывания (n = const, t = const) в формуле для определения Ре можно выделить постоянную с4 = ρn2D4(1-t), тогда Ре = с4 k1.
Схема расчета Ре приведена в табл. 3.1.
Таблица 3.1. – Расчет паспортной диаграммы судна с ВРШ
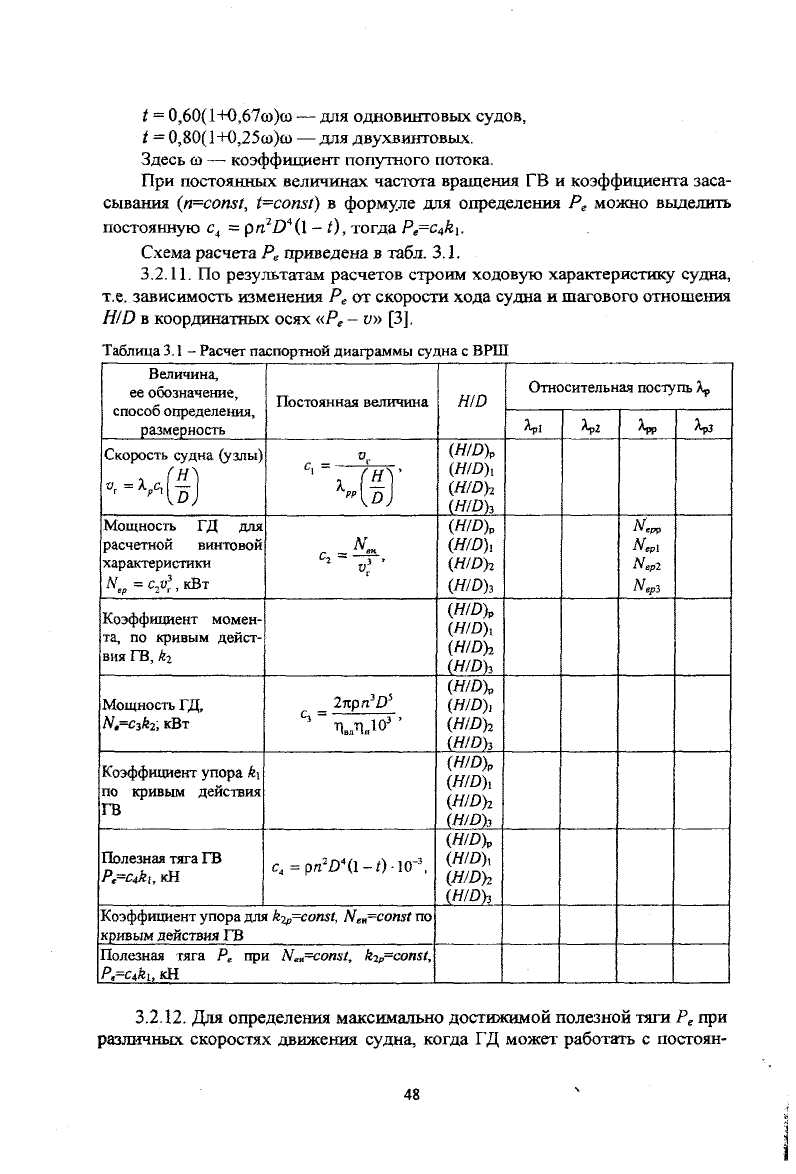
3.2.11. По результатам расчетов строим ходовую характеристику судна, т.е. зависимость изменения Ре от скорости хода судна и шагового отношения Н/D в координатных осях «Ре — υ» [3].
3.2.12. Для определения максимально достижимой полезной тяги Ре при различных скоростях движения судна, когда ГД может работать с постоянными величинами номинальной мощности (Neн=const) и частоты вращения (n=const), но с переменном шаговым отношением (H/D=var) находим по кривым действия винта значения безразмерных коэффициентов упора k1 из условия, что при постоянной мощности ГД соответствует постоянный безразмерный коэффициент момента k2, т.к. Nе = 2πk2 ρn3 D5 = const, то и k2=const (см. рис. 3.1).
3.2.13. Определяем значения полезной тяги Ре по формуле Pe=c4k1 для выше найденных величин k1 и строим зависимость изменения достижимой величины Ре в области режимов работы пропульсивной установки от расчетного (υ = υГ) до швартовного (υ = 0). При скоростях v > vГ (малые осадки, ход в балласте) предельно достижимой тягой можно считать ее равной при работе ВРШ с расчетным шаговым отношением (H/D)Р = const.
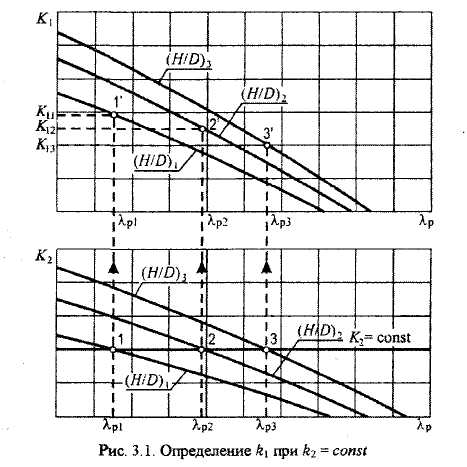
Рис. 3.1. Определение k1 при k2 = const
Дата добавления: 2015-01-24; просмотров: 3802;