Вопрос 3. Методика выбора средств компенсации реактивной мощности.
Определяется суммарная мощность компенсирующих устройств  :
:  .
.
Реактивная мощность, передаваемая со стороны высокого напряжения через цеховые трансформаторы:  .
.
 , при условии –
, при условии –  .
.
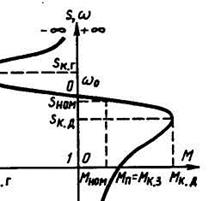
Механическая характеристика асинхронного двигателя в двигательном режиме. Ее характерные точки и электрические параметры, влияющие на координаты этих точек.
Характерные точки механической характеристики следующие: s = 0, = 0, М = 0 - точка идеального холостого хода;
s = 1, = 0, М = МКЗ = МП - точка короткого замыкания;
s = sKД, M = МКД; - критические точки в двигательном режиме;
s → ± ∞; 0 → ± ∞, М → 0 - асимптота механической характеристики, которой является ось скорости.
0 < s < 1, 0 < < - двигательный режим
На рис. 5.4 приведена механическая характеристика АД. Отметим, что она соответствует определенному чередованию фаз питающего напряжения сети , на зажимах статора АД. При изменении порядка чередования двух фаз АД будет иметь аналогичную механическую характеристику, расположенную симметрично относительно начала координат.
sК = sНОМ(М ± √ М2 - 1
M = 2MК / (s/sК + sК/s)
MК = 3UФ2 / (2 0 xК)
Полученные формулы позволяют назвать возможные способы регулирования координат АД, которое всегда связано с получением искусственных характеристик двигателя. Регулирование (ограничение) токов в роторе и статоре в переходных режимах может быть обеспечено изменением подводимого к статору АД напряжения, а также с помощью добавочных резисторов в цепях статора и ротора. Изменение уровня и частоты подводимого к двигателю напряжения; включение в цепи статора и ротора добавочных активных и реактивных резисторов; изменение числа пар полюсов магнитного поля АД. Применяются и другие способы регулирования координат, реализуемые с помощью специальных схем включения АД, - каскадные схемы, схемы электрического вала.
Дата добавления: 2015-03-19; просмотров: 1046;