Принцип действия и устройство манометра системы ГСП типа МС-П
В состав ГСП входят системы контроля и регулирования технологических процессов, которые имеют следующие ветви:
а) пневматическую;
б) электрическую (аналоговую и дискретную);
в) гидравлическую и др.
Новое качество в развитии пневматической ветви достигнуто за счёт применения перименного (модульного) принципа построения блоков и устройств и универсальной системой элементов промышленной пневмоавтоматики (УСЭППА). Каждый из этих элементов выполняет лишь простейшую функцию и не содержит внутренних коммуникаций. На элементах УСЭППА созданы как отдельные приборы, так и комплексы сложных устройств контроля и регулирования технологических процессов, а также управления этими процессами. Приборы пневматической ветви ГСП обладают высокой точностью. Они имеют классы точности 0,6 и 1. Датчики ГСП построены по точному принципу с использованием унифицированного пневмосилового преобразователя, который позволяет путём сочленения с различными чувствительными элементами измерять практически любые технологические параметры и преобразовывать их в стандартный пневматический сигнал 0,2 - 1,0 кгс/см2. Принцип действия датчиков системы ГСП основан на пневматической силовой компенсации. На рисунке 3.1 показана принципиальная схема унифицированного пневматического преобразователя. Измеряемый параметр воздействует на чувствительный элемент измерительного блока 8 и преобразуется в пропорциональное усилие Р, которое через рычажную систему 1 пневмосилового преобразователя уравновешивается Ро.с - сильфона обратной связи 7.
При измерении измеряемого параметра и, следовательно, усилия Р происходит незначительное (микронное) перемещение рычажной системы и связанной с ней заслонки 4 относительно сопла 5. Индикатор рассогласования типа сопло-заслонка преобразует это перемещение в управляющий сигнал давления сжатого воздуха, поступающего на вход пневматического усилителя 6. Выходной сигнал усиливается и поступает в линию дистанционной передачи и одновременно в сильфон обратной связи 7 пневматического преобразователя, где преобразуется в пропорциональное усилие Ро.с, которое через рычажную систему 1 уравновешивает измеряемое усилие Рот измерительного блока. Таким образом, мерой измеряемого усилия Р является текущее значение величины выходного сигнала датчика, необходимое для создания уравновешивающего усилия обратной связи Ро.с. настройка датчика на заданный диапазон измерения производится изменением передаточного отношения рычажной системы 1, достигаемым при перемещении опорной призмы 2 вдоль рычагов этой системы. Установка начального значения выходного сигнала датчика (0,2 кгс/см2) производится при помощи пружины корректора нуля 3. Питание преобразователя производится очищенным воздухом давления 1,4 кгс/см2. Предельное расстояние передачи пневматического сигнала по трубке 6 внутренним диаметром 6 мм составляет 300 м.
Датчики с унифицированным пневмосиловым преобразователем могут работать с любыми пневматическими вторичными приборами, регулирующими блоками и другими устройствами пневматики.
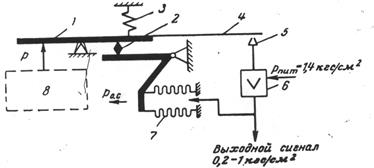 1 - рычажная система; 2- опорная призма; 3-пружина корректора нуля; 4-заслонка; 5- сопло; 6- пневматический усилитель; 7-сильфон обратной связи; 8-измерительный блок
Рисунок 14.1 - Принцип действия пневмосилового преобразователя ГСП
1 - рычажная система; 2- опорная призма; 3-пружина корректора нуля; 4-заслонка; 5- сопло; 6- пневматический усилитель; 7-сильфон обратной связи; 8-измерительный блок
Рисунок 14.1 - Принцип действия пневмосилового преобразователя ГСП
|
Дата добавления: 2015-01-13; просмотров: 3246;