Интегральное регулирование
При интегральном регулировании осуществляется пропорциональная зависимость между скоростью изменения регулирующего воздействия и ошибкой, т.е. du/dt = k2x(t) .
Иными словами, регулирующее воздействие получается пропорциональным интегралу от ошибки по времени
 , или в операторной форме
, или в операторной форме
u(p)=Wрег(p)x(p)=(k2/p)x(p). (13)
Передаточная функция цепи регулирования может иметь и более сложный вид, однако существенным здесь является то, что цепь регулирования представляет собой или имеет в своем составе интегрирующее звено.
Передаточная функция разомкнутой CAP имеет следующий вид :

В установившемся состоянии (р=0) передаточная функция W(p) стремится к ∞. В результате, первая составляющая ошибки (11) при g =const обращается в нуль, вторая составляющая, определяемая наличием возмущающих воздействий, может не обращаться в нуль, так как в установившемся состоянии числитель этой составляющей может также стремиться к ∞. Поэтому должен быть найден предел следующего выражения при f=f0=const:
который может быть как равным нулю, так и отличным от нуля.
Таким образом, при интегральном регулировании получается система, астатическая по отношению к задающему воздействию (астатизм первого порядка). Она может быть при этом как статической, так и астатической по отношению к возмущающим воздействиям (в астатической системе W(0) →∞).
Передаточная функция разомкнутой системы для интегрального регулирования может быть представлена в виде
где Kv[c-1] - коэффициент усиления разомкнутой системы. В физическом смысле Kv представляет собой отношение установившейся скорости изменения регулируемой величины к постоянной по величине ошибке х = x0 = const в разомкнутой системе: Kv = (dy/dt)уст/x0, если цепь регулирования совместно с ОР представить в виде некоторого усилителя с входной величиной х и выходной величиной у. Коэффициент Kv часто называют добротностью по скорости системы регулирования.
Регулирование может осуществляться и по двойному интегралу от ошибки времени  , или в операторной форме
, или в операторной форме
u(p)=Wрег(p)x(p)=(k3/p2)x(p).
Передаточная функция разомкнутой системы при таком регулировании равна
где Кε[с-2] - коэффициент усиления разомкнутой системы, представляющий собой отношение установившегося ускорения изменения регулируемой величины к постоянной по величине ошибке х = x0 = const в разомкнутой системе: Кε = (d2y/dt2)уст/x0,
Для установившегося значения имеем W(0) →∞ при p→0.
Система также будет обладать астатизмом относительно задающего воздействия. Однако это будет уже астатизм второго порядка.
Ошибка, определяемая задающим воздействием в (11), будет равна нулю не только при g = const, но и при изменении задающего воздействия с постоянной скоростью dg/dt = const.
Аналогичным образом можно получить астатизм третьего и выше порядков, вводя регулирование по третьему и высшим интегралам, т.е. осуществляя регулирование по закону
U(p)=Wрег(p)x(p)=(k3/pr)x(p),
где r - порядок астатизма.
Пропорциональное регулирование можно рассматривать как частный случай астатизма при r = 0.
Повышение порядка астатизма приводит к увеличению установившейся точности системы регулирования, но одновременно делает систему более замедленной в действии, т.е. снижает ее быстродействие, а также снижает запас устойчивости.
Для иллюстрации появления замедленности действия системы с интегральным регулированием рассмотрим рисунок 2.
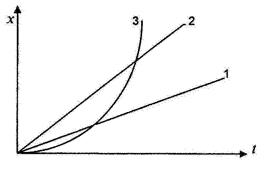

Рисунок 2
Предположим, что ошибка CAP начинает возрастать по линейному закону х = at (график 1 на рисунке 2). В системе пропорционального регулирования по такому же закону начнет создаваться управляющее воздействие u=k1x=k1at (график 2 на рисунке 2).
В системе интегрального регулирования управляющее воздействие определится по формуле  (график 3 на рисунке 2). В этом случае при t = 0 не только управляющее воздействие равно нулю, но равна нулю и его первая производная, что обуславливает медленный рост u(t) в первые моменты времени.
(график 3 на рисунке 2). В этом случае при t = 0 не только управляющее воздействие равно нулю, но равна нулю и его первая производная, что обуславливает медленный рост u(t) в первые моменты времени.
В системе пропорционального регулирования рост u(t) в первые моменты времени происходит более интенсивно, так как наличие ошибки сразу дает появление управляющего воздействия, в то время как в системе интегрального регулирования должно пройти некоторое время пока не «накопится»  . Если перейти к регулированию по двойному интегралу, то снижение быстродействия станет еще более заметным.
. Если перейти к регулированию по двойному интегралу, то снижение быстродействия станет еще более заметным.
Дата добавления: 2014-12-09; просмотров: 2026;