Простой блок управления (отрицательная обратная связь).
Чтобы блок управления системы мог «увидеть» (почувствовать и измерить) результат действия системы, он должен иметь соответствующий рецептор «У» на выходе системы и линию связи между ним и рецептором «У» (реципрокный путь).
Логика работы такого управления заключается в том, что если результат действия больше заданного, то нужно его уменьшить, активировав меньшее число СФЕ, если меньше – то увеличить, активировав больше число СФЕ. Поэтому такая связь называется отрицательной. А так как информация движется обратно, от выхода системы в сторону её начала,она называется обратной. В итоге получается отрицательная обратная связь (ООС).
Рецептор «У» и реципрокный путь составляют ООС, а вместе с анализатором-информатором и эфферентными путями (стимулятором) составляют петлю ООС. В зависимости от потребности и на основе информации ОСС блок управления по мере необходимости включает или выключает функции управляемых СФЕ (рис. 8).
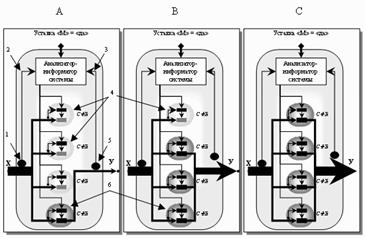
Рис. 8. Блок-схема системы с простым блоком управления. Отрицательная обратная связь.
Отличие данной системы от составной СФЕ только в наличии рецептора «У», который измеряет результат действия, и реципрокных путей, по которым информация передаётся с этого рецептора в анализатор. А – активна одна СФЕ, В – активны три СФЕ, С – активны все СФЕ. Число активных СФЕ определяется ОСС.
1 – рецептор "Х"; 2 – ППС.; 3 – ООС; 4 – неактивные СФЕ; 5 - рецептор «У» для измерения результата действия системы; 6 – активные СФЕ.
Таким образом, система, в отличие от СФЕ, содержит как ППС, так и ООС. Прямая управляющая связь активирует систему, а отрицательная обратная связь определяет число активированных СФЕ.
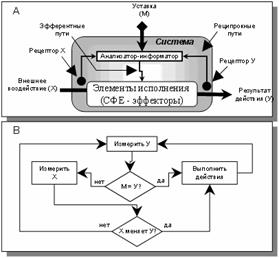
Рис. 9. Простой блок управления систем с ООС (А) и алгоритм его работы (В) .
Цель системы - результат действия «Y» должен быть равен уставке «М» (Y=M). Действия системы для достижения цели осуществляют элементы исполнения. Блок управления следит за правильностью выполнения действий.
Блок управления, содержащий ППС и петлю ООС, является простым. Петля ООС постоянно отслеживает результат действия исполнительных элементов (СФЕ). Если результат действия получается больше, чем задано, нужно его уменьшить, если результат меньше заданного – нужно его увеличить. Через уставку задаются параметры управления («база данных»), например, каким должно быть соотношение между внешним воздействием и результатом действия, или какой уровень результата действия нужно постоянно удерживать и т.д. При этом максимальной точностью будет результат действия одной СФЕ (квант действия).
Системы с ООС, как и составные СФЕ, также содержат два типа объектов:
элементы исполнения (СФЕ) (эффекторы, которые выполняют специфические действия для достижения заданной генеральной цели системы)
блок управления (ППС и петля ООС)
Но блок управления системы кроме информатора «Х» также содержит и информатор «У» (ОСС). Поэтому у него есть информация и о внешнем воздействии, и о результате действия. система с ООС может оптимально выполнить любое необходимое действие, от минимума до максимума с точностью до одного кванта действия.
Системы с ООС могут решать большинство задач намного лучше, чем простые или составные СФЕ. Наличие ООС почти не усложняет систему.
Любая СФЕ (простая и составная) может выполнить только минимум или максимум действия. Системы с ООС уже могут дать оптимум результата действия, от минимума до максимума, являются точными и стабильными. Их точность зависит только от величины кванта действия отдельной СФЕ и глубины ООС. Стабильность обусловлена тем, что система постоянно «видит» свой результат действия, может сравнивать его с должным и исправлять его, если есть расхождение.
Любой блок управления характеризуется тремя параметрами ППС и столько же параметров петли ООС. Для ППС это:
· минимальным уровнем контролируемого входного воздействия (порог чувствиетльности)
· максимальным уровнем контролируемого входного воздействия (диапазон чувствительности входного воздействия)
· временем включения управления (временем принятия решения)
Для петли ООС это:
минимальным уровнем контролируемого результата действия (порог чувствительности петли ООС - глубина ООС)
максимальным уровнем контролируемого результата действия (диапазон чувствительности результата действия)
временем включения управления (временем принятия решения)
Минимальный уровеньконтролируемого входного сигнала для ППС – это порог чувствительности сигнала рецептора «Х», начиная с которого анализатор-информатор распознаёт, что внешнее воздействие уже началось
Максимальный уровень контролируемого входного сигнала (диапазон) для ППС – это уровень сигнала о внешнем воздействии, при котором срабатывают все СФЕ.
Время включения ППС – промежуток времени между началом внешнего воздействия и началом срабатывания системы.
Минимальный уровеньконтролируемого выходного сигнала для ООС – это порог чувствительности сигнала рецептора «У», начиная с которого анализатор-информатор распознаёт, что есть расхождение между результатом действия системы и его должной величиной.
Глубина ООС – это число квантов действия одиночных СФЕ системы, сумма которых распознаётся как расхождение между актуальным результатом действия и должным. Задаётся уставкой.
Максимальный уровень контролируемого выходного сигнала (диапазон) для ООС – это уровень сигнала о результате действия системы, при котором срабатывают все СФЕ.
Время включения управления ООС – промежуток времени между началом расхождения сигнала о результате действия с целевым и началом срабатывания системы.
Все эти параметры могут быть «встроены» в ППС и в петли ООС либо изначально (уставка вводится при их «рождении»), Либо могут быть введены с уставкой позже и эти параметры можно менять путём ввода извне новой уставки.
система с простым блоком управления является объектом, который может реагировать на определённое внешнее воздействие, а результат её действия градуированный и стабильный.
У простого блока управления есть три канала управления – один внешний (уставка) и два внутренних (ППС и ООС). Он реагирует на внешнее воздействие через ППС (информатор «Х») и на собственный результат действия системы (информатор «У») через ООС, а через эфферентные пути управляет исполнительными элементами системы.
Таким образом, используя ППС и ООС и регулируя работу своих СФЕ система продуцирует свои результаты действия, качественно и количественно соответствующие заданной цели.
Основные понятия теории сложности. Сложность
Сложность — свойство современных систем управления.
Различают следующие понятия сложности:
1) Математическое
2) Информационное
3) Структурное
4) Обобщенное
5) Алгоритмическое
6) и др.
Математическое понятие относится к теории конечных автоматов. 50-е гг XX века. Основная характеристика сложности системы — число элементарных блоков, образующих систему.
Информационное понятие введено Колмогоровым и относится к теории информации. Сложность здесь связана со случайностью. Основная характеристика сложности системы — спектр частот. Вроде бы такого понятия достаточно для оценок свойств системы, но все же есть недостаток: не учитываются комбинации подсистем в системе.
В структурном понятии учитываются взаимосвязи между подсистемами в системе. Систему формируют таким образом, чтобы она обладала определенными статическими и динамическими характеристиками. Основная характеристика сложности системы — статические (установившееся состояние системы) и динамические (переходные режимы системы) свойства системы.
При реализации системы стремятся использовать наиболее простые технические средства. Таким образом, косвенно учитываются требования надежности и стоимости. Учет надежности и экономичности на этапе проектирования делает эту задачу более корректной. Кроме того, любая задача должна быть математически корректной (математическая корректность — сходимость алгоритмов управления). Неустойчивость алгоритмов обусловлена 1) неточностью исходных данных, 2) неточностью их реализации в компьютере на этапе проектирования или в ВК (вычислительном Комплексе) при работе с системой.
В обобщенном понятии основная характеристика сложности системы — шкала сложности. Основные признаки построения шкалы сложности:
— порядок дифференциального оператора
— спектр частот
— основные характеристики ВК
— надёжность
— стоимость
— алгоритмическая сложность и др.
Основные понятия теории сложности. Иерархия
Когда проблемой является определение свойств системы по характеристикам отдельных подсистем, используется иерархический подход, позволяющий решить эту проблему.
Основные признаки иерархии:
1. Сложные иерархические структуры являются многоуровневыми, на определенных уровнях которых принимаются решения;
2. Общая (глобальная) и местная (локальная) цели функционирования должны координироваться;
3. Между уровнями системы происходит обмен информацией, при этом приоритетом обладает информация, поступающая с верхнего уровня. Для нижнего уровня она является командной и подлежит выполнению, если это возможно;
4. Процесс обмена информацией снизу вверх в структуре замедляется.
Дата добавления: 2015-01-02; просмотров: 1255;