Простейший блок управления (прямая положительная связь).
Чтобы любая СФЕ могла действовать, она должна содержать определённые элементы для осуществления своих действий согласно закону сохранения и причинно-следственных ограничений. Для выполнения целевых действий система должна содержать элементы исполнения, а для того, чтобы взаимодействие элементов исполнения было целевым, система должна содержать элементы (блок) управления.
Элементы исполнения (эффекторы) выполняют само определённое (целевое) действие системы, чтобы получался заданный результат действия. Сам собой результат действия не получится. Для его получения необходимо действие определённых объектов. Такими элементами на примере плоскостей с пробным шаром являются сами плоскости.
Элементы управления (блок управления) необходимы для того, чтобы получался именно заданный, а не какой-либо иной результат действия. Так как целью является реакция в ответ на специфическое внешнее воздействие, то сначала нужно почувствовать его, выделить его из множества других неспецифических внешних воздействий, принять решение о каких-либо специфических действиях и начать действовать.
Следовательно, чтобы прореагировать на определённое внешнее воздействие и получить необходимый результат действия необходимо выполнить следующую цепочку управляющих действий :
рецепция → селекция → принятие решения → реализация решения (стимуляция)
Элементы исполнения (например, плоскости) этого делать не могут, потому что выполняют само действие, например, захвата, но не действия управления.
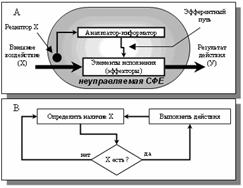
Рис. 4. Неуправляемая простая СФЕ (А) и алгоритм работы её блока управления (В).
Блок управления состоит из (рис. 4):
рецептора Х (выделяет специфичный сигнал и определяет наличие внешнего воздействия)
афферентных путей (передают информацию с рецептора в анализатор)
анализатора-информатора (на основе информации с рецептора «Х» вырабатывает решения об активации исполнительных элементов)
эфферентных путей (стимулятора) (реализация решения, передают управляющие воздействия на эффекторы)
Рецептор и афферентные пути является прямой положительной связью (ППС). Прямой потому, что внутри СФЕ сигнал управления (информации о наличии внешнего воздействия) идёт в том же направлении, что и само внешнее воздействие. Положительной потому, что если есть сигнал, есть реакция, нет сигнала, нет реакции.
Есть неуправляемые (рис. 4) и управляемые СФЕ (рис. 5). Блок управления неуправляемых СФЕ решает действовать или нет только в зависимости от наличия внешнего воздействия. Блок управления управляемых СФЕ также решает действовать или нет в зависимости от наличия внешнего сигнала, но при наличии дополнительного условия – разрешения на это действие, которое подаётся на его вход уставки.
У неуправляемой СФЕ есть один вход для внешнего воздействия и один выход для результата действия. Логика работы такой СФЕ чрезвычайно простая – если есть определённое внешнее воздействие, то она действует, если нет внешнего воздействия, то нет результата действия. Для неуправляемых СФЕ регулятором действия является само внешнее воздействие. У неё есть собственное управление, осуществляемое внутренним блоком управления. Но у такой СФЕ невозможно внешнее управление. Она сама решает, действовать ей, или нет. Поэтому она называется неуправляемой. Неуправляемая СФЕ независима от внешних решений. Если она «решила», то выполнит свое действие.
В отличие от неуправляемых у управляемых СФЕ есть два входа (один для входа внешнего воздействия и один – для ввода уставки в анализатор) и один выход для результата действия (рис. 5). Логика работы управляемой СФЕ несколько отличается от логики работы неуправляемой СФЕ. Такая СФЕ будет давать результат действия не только в зависимости от наличия внешнего воздействия, но и от наличия разрешения на входе уставки.
Если есть определённое внешнее воздействие и есть разрешение на входе уставки, то действие начнёт выполняться. Если есть внешнее воздействие и нет разрешения на входе уставки, то не должно быть действия. Для управляемых СФЕ регулятором действия является разрешение на входе уставки. Потому такие СФЕ называются управляемыми.
Элементы блока управления построены из других обычных элементов, подходящих по своим характеристикам. Он может быть построен как из самих исполнительных элементов, соединённых определённым образом и по совместительству выполняющих функции исполнения и управления, так и из других не принадлежащих к данной группе исполнительных элементов и выделенных в отдельную цепь управления. В последнем случае они могут быть точно такими же, как и исполнительные элементы, но также могут быть сделаны и из других элементов. 
Рис. 5. Управляемая СФЕ (А) и алгоритм работы блока её управления (В).
Блок управления является простейшим если он содержит только ППС (рецептор «Х» и афферентные пути), анализатор-информатор и стимулятор.
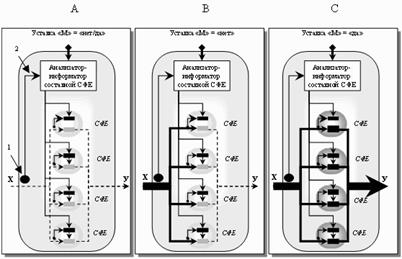
Рис. 6. Составная СФЕ в режиме ожидания (А), запрете функции (В) и её реализации (С).
Составная СФЕ содержит 4 простых СФЕ. Если нет никакого внешнего воздействия, все простые СФЕ неактивны, нет никакого результата действия (А). Если есть внешнее воздействие «Х», но уставка вносит «нет» (запрет на действие), все СФЕ также неактивны и также нет результата действия (В). Если есть внешнее воздействие и уставка вносит «да» (разрешение на действие), то все СФЕ активны и есть результат действия (С). «Мощность» данной составной СФЕ в 4 раза больше «мощности» простой СФЕ. Активация СФЕ производится через вводы уставки их блоков управления. У каждой простой СФЕ есть собственная ППС и общая для них всех ППС.
1 – рецептор «X»; 2 – прямая положительная связь.
Из неуправляемых и управляемых СФЕ можно строить другие СФЕ (составные, рис. 6), более мощные, чем одиночная СФЕ.
Блок-схема составной СФЕ очень похожа на блок-схему простой СФЕ. Отличие составной СФЕ от простой только количественное. Простая СФЕ содержит только одну СФЕ – саму себя, а составная содержит несколько СФЕ, потому есть возможность усиления результата действия.
У составной СФЕ такой же блок управления, как и отдельной СФЕ, т.е., простейший, с прямой управляющей связью (ППС). Составные СФЕ также работают по принципу «всё или ничего». Отличие составных СФЕ от простых СФЕ только в силе или амплитуде реакции, которая пропорциональна числу простых СФЕ.
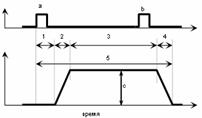
Рис. 7. Полный цикл и микроциклы функции простой идеальной составной СФЕ.
a – внешнее воздействие на которое СФЕ начинает реагировать; b – внешнее воздействие, на которое СФЕ не реагирует, потому что находится в рефрактерном состоянии (не может активировать исполнительные элементы, потому что они уже активированы); с – амплитуда результата действия СФЕ на графике функции СФЕ.
1 – восприятие и селекция внешнего воздействия рецептором “X” после начала внешнего воздействия и принятие решения; 2 – активация элементов исполнения; 3 – выполнение действия элементов исполнения; 4 – прекращение функции; 5 – полный цикл функции СФЕ.
Цикл работы идеальной простой и составной СФЕ складывается из микроциклов (рис. 7):
восприятие и селекция внешнего воздействия рецептором «X» и принятие решения
воздействие на исполнительные элементы (СФЕ)
срабатывание исполнительных элементов (СФЕ)
прекращение функции.
После начала внешнего воздействия срабатывает рецептор «X» (1-й микроцикл). Затем уходит какое-то время на принятие решения, потому что это решение само является результатом действия определённых СФЕ, входящих в состав блока управления (2-й микроцикл). Затем активируются (включаются) все СФЕ (3-й микроцикл). Время срабатывания СФЕ зависит от скорости утилизации энергии, затраченной на действие СФЕ.
У любой СФЕ цикл её деятельности складывается из этих микроциклов. Поэтому, её время цикла (5 на рис. 7) работы всегда одинаковое и равно сумме этих микроциклов. Если СФЕ начала свои действия, она не остановится, пока не завершит свой полный цикл.
В реальных составных СФЕ к этим микроциклам могут добавляться дополнительные микроциклы, обусловленные несовершенством реальных объектов.
Отсюда видно, что даже простейшие системы, каковыми являются СФЕ, срабатывают не сразу, а им требуется какое-то время, пока появится их результат действия. Этим объясняется инерционность систем, которую можно измерить, используя параметр постоянной времени.
Постоянная времени – это время между началом внешнего воздействия и готовностью к новому внешнему воздействию после выработки результата действия.
Таким образом, простая СФЕ является объектом, который может реагировать на определённое внешнее воздействие, а результат её действия всегда максимальный, потому что блок управления не контролирует его, т.е., она работает по закону «всё или ничего». Тип её реакции обусловлен типом СФЕ. Есть два вида простой СФЕ – неуправляемая и управляемая.
Составная СФЕ является таким же объектом, как и простая СФЕ, но результат её действия усиленный.
В принципе составная СФЕ могла бы дать градуированный результат действия, потому что у неё есть несколько СФЕ, которые она могла бы включать в разной последовательности. Но такая система не может сделать этого, потому что не «видит» свой результат действия и не может его сравнить с тем, что должно быть.
Дата добавления: 2015-01-02; просмотров: 930;