Лекция 2. Тема: «Элементная база релейной защиты.»
Тема: «Элементная база релейной защиты.»
Элементные базы. В практике современного реле строения используются три типа элементных баз:
электромеханическая, которая может использоваться для осуществления всех функциональных частей и органов РЗ в виде электромеханических реле:
полупроводниковая, которая может использоваться для осуществления всех функциональных частей и органов РЗ в виде полупроводниковых элементов, аналоговых и цифровых микросхем;
микропроцессорная, которая может использоваться для осуществления измерительной и логической частей РЗ на базе микроЭВМ или многопроцессорных систем, основным элементом которых являются микропроцессоры.
Основные элементы РЗ. Устройство РЗ состоит из реле, соединенных между собой по определенной схеме.
Реле, условно показанное на рис. 1. а, представляет собой автоматически действующий аппарат, реагирующий на изменение подводимой к его входу электрической величины X (тока, напряжения или их функций). При определенном значении входной величины X, называемой параметром срабатывания Хср, реле приходит в действие - срабатывает. При этом на его выходе скачком появляется выходной сигнал (обычно в виде напряжения или тока), воздействующий на подключенную к выходным зажимам реле цепь управления каким-либо устройством, например другим реле или приводом силового выключателя.
В технике РЗ длительное время применяются реле с коммутирующими контактами - электромеханические, имеющие подвижные части. В последние годы широкое распространение получают более совершенные реле - бесконтактные, статические без подвижных частей, выполняемые на полупроводниковых элементах. У первых; при срабатывании подвижная система приходит в действие, контакты К замыкаются (рис. 1, б) и подают на управляемую ими цепь напряжение  от специального источника питания (ИП). Под действием этого напряжения в управляемой цепи возникает ток
от специального источника питания (ИП). Под действием этого напряжения в управляемой цепи возникает ток  . У вторых (бесконтактных) реле при срабатывании на выходе реле возникает сигнал в виде напряжения
. У вторых (бесконтактных) реле при срабатывании на выходе реле возникает сигнал в виде напряжения  , вызывающий появление тока в управляющей цепи (рис. 1, в). На рис. 1, г приведена характерная для обоих видов реле зависимость выходного сигнала Y от входного X:
, вызывающий появление тока в управляющей цепи (рис. 1, в). На рис. 1, г приведена характерная для обоих видов реле зависимость выходного сигнала Y от входного X:  , которая называется проходной характеристикой. Входной сигнал, при котором реле срабатывает, обозначен Хср.
, которая называется проходной характеристикой. Входной сигнал, при котором реле срабатывает, обозначен Хср.
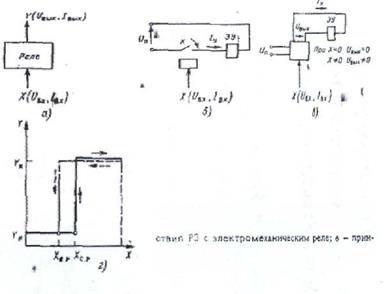 |
Рис. 1. К пояснение принципа действия РЗ: а – структурная схема реле; б - принцип действия РЗ с электромеханическим реле; в) принцип действия РЗ со статическим реле; г.д - проходная характеристика реле
Если после срабатывания реле X начнет уменьшаться (пунктирная линия на рис. 1, г), то до некоторого значения Хв.р Y остается неизменным. Но как только X станет равным Хво, выходной сигнал скачком снижается до начального уровня Yн, и реле возвращается в исходное состояние. Значение Хв называется величиной возврата реле.
Скачкообразное изменение выходного сигнала в реле называют
дискретным, а проходную характеристику - релейной.
Дата добавления: 2014-12-18; просмотров: 6650;