Определение инерционных характеристик судна
Инерционные испытания судна являются обязательной частью программы сдаточных испытаний. Они состоят из определения инерционных характеристик судна и его механической установки при свободном выбеге и активном торможении, на 2-3 режимах хода, при одном состоянии нагрузки судна на испытаниях, чистом корпусе и отсутствии ветра и волнения. Естественно, что составленная по результатам таких испытаний информация не может быть достаточно полной. Как указывалось ранее наинерционные свойства морских судов большое влияние оказывают состояние нагрузки, обрастание корпуса ракушками и водорослями, наличие ветра и волнения. Кроме сведений о тормозных характеристиках, судоводитель должен иметь информацию о характеристиках разгона и изменения режима движения, о поведении судна при одновременном реверсе двигателя и перекладке руля на правый и левый
борт, о скорости с остановленным двигателем, при которой судно
перестает слушаться руля. Все эти сведения могут быть получены
судовым составом экспериментальным путем в процессе эксплуатации судна.
 Во всех случаях инерционных испытаний отсчет времени должен начинаться с момента отдачи команды машинным телеграфом на изменение режима движения. При свободном выбеге или свободном торможении, когда судно совершает движение по инерции с остановленным двигателем, испытания должны заканчиваться при той скорости, при которой перекладками руля невозможно удержать судно на исходном прямолинейном курсе, т.е. до того момента, когда оно начинает терять управляемость (кроме случая инерционного испытания на циркуляции).
Во всех случаях инерционных испытаний отсчет времени должен начинаться с момента отдачи команды машинным телеграфом на изменение режима движения. При свободном выбеге или свободном торможении, когда судно совершает движение по инерции с остановленным двигателем, испытания должны заканчиваться при той скорости, при которой перекладками руля невозможно удержать судно на исходном прямолинейном курсе, т.е. до того момента, когда оно начинает терять управляемость (кроме случая инерционного испытания на циркуляции).
При активном торможении винтом, работающим на задний ход, испытания заканчиваются в момент остановки судна. При инерционных испытаниях разгона или изменения режима движения замеры прекращают после выхода судна на установившийся режим движения с постоянной скоростью.
При всех инерционных испытаниях должен производиться замер изменения частоты вращения винта в зависимости от времени по показаниям тахометра. При этом следует зафиксировать время остановки вращения винта и время начала работы его на задний ход. Это необходимо не только потому, что режим работы винта оказывает существенное влияние на инерционные характеристики, но также и потому, что реверс двигателя является сложным процессом, имеющим в некоторой степени субъективный характер. Регистрация условий проведения испытаний (осадка, район, ветер, волнение, течение, глубина моря и т.д.) в соответствии с указанным ранее является обязательной и при проведении инерционных испытаний.
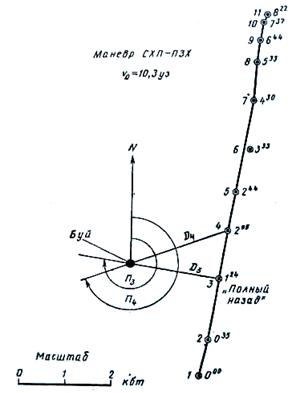
Курс судна должен быть выбран так, чтобы в конце маневра можно было легко заметить момент остановки судна. Исходя из этого, маневр целесообразно начинать примерно на траверзе буя, на расстоянии от него, несколько превышающем мертвую зону РЛС (1,5-2,0 кбт), с тем, чтобы на экране иметь устойчивый эхо-сигнал ориентира. В заданную точку начала замеров судно должно выходить прямым курсом на установившейся скорости. Организация и методика проведения испытаний не отличаются от описанных ранее.
По результатам испытаний строится в выбранном масштабе траектория движения судна относительно буя (рис.40), на которой у соответствующих точек положения судна проставляется время замера пеленга и дистанции. Замеры дистанции и пеленга можно начать до отдачи команды на изменение режима (точки 1 и 2 ни рис. 39). Это позволит на участках1-2 и 2-3проверить работу испытательной партии и определить начальную скорость. Сняв с построенной траектории длины участков, проходимых судном, и последовательно суммируя их, строят график S=f(t), приняв за исходную точку момент отдачи команды на изменение режима движения (точка 3 ни рис. 40).
Эту же задачу можно решить чисто аналитическим путем, без построения траектории движения судна. Если сделать допущение, что на каждом из участков замера дистанции и пеленга судно движется прямолинейно, то путь, проходимый судном между двумя смежными замерами, определится по выражению

| (84) |
|
Рис. 40 Траектория инерционного движения танкера «София»
Приняв что на достаточно малых участках  кривая
кривая  прямолинейна, можно получить:
прямолинейна, можно получить:

| (85) |
Инерционные характеристики судов и составов при натурных испытаниях могут быть определены также методами подвижного и неподвижного базисов. Пеленгование объектов при этом не отличается от пеленгования при циркуляционных испытаниях.
Момент остановки судна определяется по изменению теодолитных углов в сторону уменьшения.
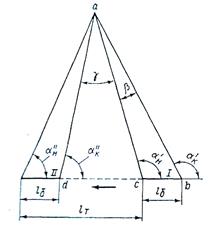
При методе подвижного базиса путь судна находится таким образом.
Пусть судно из положения I (рис. 41) перешло в положение II. Отсчеты теодолитных углов соответственно были в положении I  и
и  . С учетом продвижения судна теодолитные углы изменились и стали равны в положении II
. С учетом продвижения судна теодолитные углы изменились и стали равны в положении II  и
и  . Из треугольников abcи acd путь, проходимый судном,
. Из треугольников abcи acd путь, проходимый судном,
| (86) |
|
Рис. 41. Определение пути торможения судна методом подвижного базиса
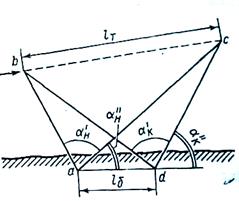
При методе неподвижного базиса для определения пути, проходимого судном, по известным длине базиса и отсчету теодолитных углов в начале и и в конце опыта и используем графическое построение, изображенное на рис. 41
|
Рис. 42. Определение пути торможения судна методом неподвижного базиса
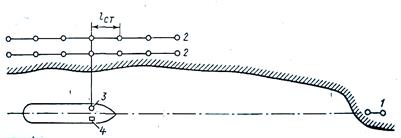
Кроме этого, инерционные характеристики судов и составов могут определяться с использованием специальных полигонов и датчиков пути (скорости). Полигон для проведения испытаний разбивается на берегу водохранилища или реки. Для выбора курса судна устанавливаются направляющие створы 1 (рис. 43), кроме того, на полигоне перпендикулярно курсу движения судна на определенном расстоянии друг от друга устанавливаются створные знаки 2.
На судне располагается наблюдатель 4 с секундомером, выбирая перед собой какой-либо ориентир 3, расположенный перпендикулярно ДП судна. В момент, когда ориентир, выбранный наблюдателем на судне, поравняется со створными знаками, установленными на берегу, наблюдатель запускает секундомер и подает команду о начале реверса главных двигателей.
Наблюдатель фиксирует время прохождения судном каждой пары створных знаков. Отметка времени должна производиться по двухстрелочному секундомеру. Рабочая стрелка секундомера останавливается в момент прохождения створных знаков, а вторая - отсчитывает время от начала опыта.
После остановки судна относительно берега секундомер выключают. Так как судно в большинстве случаев останавливается на участке, расположенном между двумя соседними парами створных знаков, наблюдатель определяет визуально последний отрезок пути. Путь, проходимый судном, определяется по количеству пройденных створных знаков.
Датчик пути (скорости) используется для определения инерционных характеристик судов относительно воды.
|
Рис. 43. Схема полигона для определения инерционных характеристик судов
Определение маневренных элементов судна с использованием СРНС.Точность определения места судна по современным спутниковым радионавигационным системам (СРНС) в дифференциальном режиме позволяет использовать имеющиеся на судах приемоиндикаторы (ПИ) СРНС при проведении стандартных маневров для определения маневренных элементов судна. Оптимальным вариантом является использование официальных электронных карт, сопряженных с ПИ СРНС, так как в этом случае на электронной карте отображается траектория движения судна (полоса движения) в масштабе карты с распечаткой контура корпуса судна в основные моменты выполняемого маневра. Для фиксирования положения судна на электронной карте и получение траектории движения судна используются стандартные функциональные команды (типа «Event», «MOB» и т. д.). Распечатка электронной карты заменяет миллиметровый планшет, на котором обычно строятся кривые движения судна при выполнении маневра.
Дата добавления: 2019-07-26; просмотров: 630;