Статические и астатические системы
На рис. 11 представлены два вида систем.
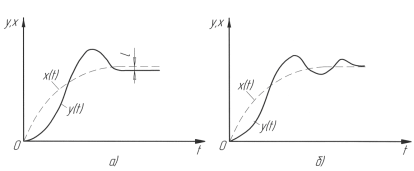
Систему называют статической по отношению к управляющему воздействию, если при воздействии, стремящемся с течением времени к некоторому значению, ошибка также стремится к постоянному значению, зависящему от значения управляющего воздействия, т.е. статическая система не может обеспечить постоянство управляемого параметра при переменной нагрузке.
Систему называют астатической по отношению к управляющему воздействию, если при воздействии, стремящемся к установившемуся значению, ошибка стремиться к нулю независимо от значения воздействия.
|
|
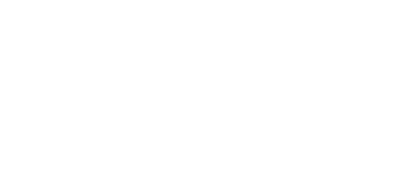
Рис. 11. Статическая (а) и астатическая (б) системы
Изменение управляемого параметра, которое вызывает у статической системы перемещение управляемого органа из одного предельного положения в другое, является важнейшей характеристикой статической системы и называется её неравномерностью. Отношение этой неравномерности к номинальному значению управляемого параметра называют степенью неравномерности (коэффициент статизма).
Если при изменении нагрузки от нуля до номинального значения в ста-тической системе значение управляемого параметра изменилось от nх.х до nном, то статизмом системы будет называться отношение величины изменения управляемого параметра (nх.х – nном) к значению параметра в режиме холостого хода.
Устойчивость САУ
При переходе системы из одного установившегося режима работы в другой она может оказаться либо устойчивой, либо неустойчивой.
Чтобы это установить, необходимо исследовать динамику процесса уп-равления, т.е. определить закон изменения управляемого параметра в виде
функции времени при воздействии на САУ возмущающих факторов или управляющих воздействий. САУ считается устойчивой, если после установления новых значений возмущающих или управляющих воздействий эта система спустя некоторое время может монотонно приближаться к новому установившемуся значению yуст.2 (рис. 12, а), или, совершив несколько колебаний нового установившегося значения управляемого параметра yуст.2, приходит к установившемуся режиму работы (рис. 12, б).





|
|



|
|
|
|
|













|





| |||
| |||
Рис. 12. Виды переходных процессов:
а, б – устойчивая САУ; в, г – неустойчивая САУ;
д – консервативная САУ
Неустойчивая система, придя в движение, не возвращается к установившемуся состоянию равновесия. При этом в неустойчивой системе после возникновения возмущающего или управляющего воздействия отклонение от состояния равновесия или все время увеличивается (рис. 12, в), или непрерывно изменяется в форме постоянных незатухающих колебаний (рис. 12, г). Частным случаем является САУ, которая совершает незатухающие колебания около нового установившегося значения управляемого параметра (рис. 12, д).
Таким образом, условие устойчивости САУ состоит в том, что абсолютное значение отклонения управляемого параметра от заданного по истечению некоторого времени должно стать меньше некоторого наперед заданного значения.
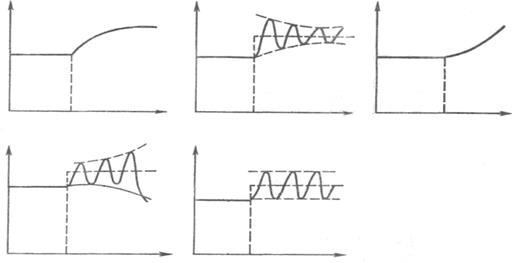
Кроме устойчивости, есть и другие условия, от которых зависит функционирование САУ. Это время переходного процесса Т1 или Т2 , отклонения управляемого параметра от заданного значения δ1 или δ2 (рис. 13).
| |


|
|

Рис. 13. Иллюстрация качества процесса управления
Качество процесса управления характеризуется степенью поддержания управляемого параметра, когда на САУ не воздействуют внешние возмущения, а также видом переходных процессов при воздействии внешних возмущений.
1.6. Система «станок – инструмент – процесс резания»
Дата добавления: 2019-04-03; просмотров: 955;