Примеры подключения электронных компонентов к микроконтроллеру
Таблица 2 – Подключение электронных компонентов
| № | Поясняющий рисунок | Фрагмент Программного кода для работы с элементом | Замечания |
| Светодиод | |||

| void setup() { //Определение ножки подключения //светодиода как выхода контроллера pinMode(13, OUTPUT); } void loop() { //Включение светодиода, //подачей высокого уровня сигнала //на ножку его подключения digitalWrite(13, HIGH); } | Соблюдайте полярность светодиода Номинал резистора >100 Ом | |
| Кнопка | |||

| void setup() { //Определение ножки подключения //кнопки как входа контроллера pinMode(3, INPUT); } void loop() { //Считывание уровня сигнала //кнопки с ножки 3 в переменную x int x = digitalRead(3); } | Номинал резистора =10 кОм | |
| Потенциометр | |||

| void setup() { } void loop() { //Считывание значения напряжения //потенциометра с ножки A0 в //переменную x int x = analogRead(A0); } | ||
| Продолжение таблицы 2 | |||
| Фоторезистор | |||

| void setup() { } void loop() { //Считывание значения напряжения //фоторезистора с ножки A0 в //переменную x int x = analogRead(A0); } | Номинал резистора =10 кОм | |
| Сервопривод | |||
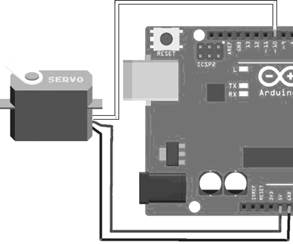
| //Подключение библиотеки #include <Servo.h> //Определение объекта сервопривода Servo Myservo; void setup() { //Определение ножки подключения //сервопривода Myservo.attach(10); } void loop() { //Задание угла положения //сервопривода Myservo.write(90); } | Провода: Коричневый – земля Красный – 5 Вольт Жёлтый - сигнал | |
| LCD монитор 1602 | |||
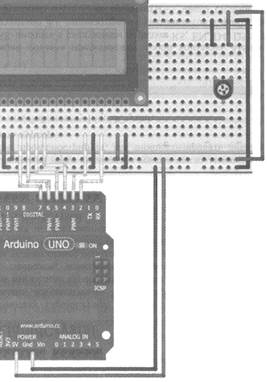
| //Подключение библиотеки #include <LiquidCrystal.h> //Определение объекта монитора LiquidCrystal lcd(2,3,4,5,6,7); void setup() { //Определение типа монитора (16х2) lcd.begin(16,2); } void loop() { //Установка курсора в 3 символ //второй строки lcd.setCursor(2,1); //Вывод текста на экран lcd.print("Text"); //Вывод значения переменной //на экран int a=5; lcd.print(a); } | Потенцио-метр необходим для регулирова-ния яркости монитора | |
| Продолжение таблицы 2 | |||
| Мотор с редуктором | |||
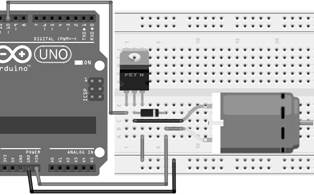
| void setup() { //Определение ножки подключения //мотора как выхода контроллера pinMode(10, OUTPUT); } void loop() { //Вращение мотора с половиной //от максимальной скорости analogWrite(10, 128); } | Соблюдайте полярность диода |
Дата добавления: 2018-09-24; просмотров: 437;