БЕСКОНТАКТНЫЕ КОММУТАЦИОННЫЕ УСТРОЙСТВА ЭЛЕКТРОАВТОМАТИКИ
4.1. ОБЩИЕ СВЕДЕНИЯ
В отличие от контактных коммутационных АУ размыкание цепи осуществляется без разрыва электрической цепи. По сравнению с контактными они имеют следующие преимущества: нет дуги при размыкании; нет подвижных элементов; высокая надёжность и срок службы; высокое быстродействие. В то же время им присущи и недостатки:
а) нет полного разрыва цепи и гальванической развязки, что характеризуется соотношением разомкнутого и замкнутого состояния элемента, что храктеризуется отношением обратного  и прямого
и прямого  и сопротивлений:
и сопротивлений:
- контакные  ;
;
- бесконтактные  ;
;
б) не допускают больших перегрузок по току, причем они кратковременны (милисекунды), что характеризуется отношением максимально допустимого  и номинального
и номинального  токов :
токов :
- контактные  ; бесконтактные
; бесконтактные  ;
;
в) весьма чувствительны к сверхтокам и перенапряжениям;
г) стоимость в последнее время стала ниже контактных.
В зависимости от типа используемых первичных элементов различают две группы АУ на магнитных элементах; на полупроводниковых приборах: транзисторные и тиристорные.
4.2. МАГНИТНЫЕ УСИЛИТЕЛИ
4.2.1. Принцип действия
Усиление тока в цепи нагрузки достигается за счет эффекта уменьшения индуктивного сопротивления. Магнитный усилитель (МУ) состоит (рис. 4.1) из

|
замкнутого магнитопровода, на котором располагаются две катушки - рабочая (  ) и управления (
) и управления (  ) . В цепь рабочей обмотки включено сопротивление нагрузки, и к ней прикладывается переменное напряжение. Сила тока в цепи нагрузки при условии, что активное сопротивление рабочей обмотки значительно меньше индуктивного
) . В цепь рабочей обмотки включено сопротивление нагрузки, и к ней прикладывается переменное напряжение. Сила тока в цепи нагрузки при условии, что активное сопротивление рабочей обмотки значительно меньше индуктивного  , будет
, будет
 , где
, где  ,
,
где  - индуктивность рабочей обмотки;
- индуктивность рабочей обмотки;  ,
,  - соответственно площадь сече ния и длина магнитопровода;
- соответственно площадь сече ния и длина магнитопровода;  - динамическая магнитная проницаемость,
- динамическая магнитная проницаемость,
 ,
,  - магнитная индукция и напряжённость электрического поля;
- магнитная индукция и напряжённость электрического поля;  - круговая частота. Очевидно, что силу тока в цепи катушки можно менять изменением индуктивности. Для уменьшения уменьшают величину за счёт создания постоянной напряжённости электромагнитного поля по цепи обмотки управления. Обратимся к рис. 4.2, на котором представлены характеристики магнитной системы. При
- круговая частота. Очевидно, что силу тока в цепи катушки можно менять изменением индуктивности. Для уменьшения уменьшают величину за счёт создания постоянной напряжённости электромагнитного поля по цепи обмотки управления. Обратимся к рис. 4.2, на котором представлены характеристики магнитной системы. При  ,
, 
 напряжённость электрического поля, создаваемая рабочей обмоткой , порождает магнитную индукцию , Следует отметить, что напряжённость
напряжённость электрического поля, создаваемая рабочей обмоткой , порождает магнитную индукцию , Следует отметить, что напряжённость  не зависит от свойств среды, а магнитная индукция определяется как напряжённостью, так и свойствами среды, характеризующимися относительной магнитной проницаемостью (
не зависит от свойств среды, а магнитная индукция определяется как напряжённостью, так и свойствами среды, характеризующимися относительной магнитной проницаемостью (  ), т.е. энергия идёт на перемагничивание. При подаче , (рис. 4.2,а) в магнитной системе создаётся постоянная составляющая напряженности
), т.е. энергия идёт на перемагничивание. При подаче , (рис. 4.2,а) в магнитной системе создаётся постоянная составляющая напряженности  , которая смещает рабочую точку для
, которая смещает рабочую точку для  , в результате изменяется (уменьшается) амплитуда . Критическое значение
, в результате изменяется (уменьшается) амплитуда . Критическое значение  соответствует участку насыщения кривой намагничивания.
соответствует участку насыщения кривой намагничивания.

|
Таким образом при подаче уменьшается  .
.
График характеристики  представлен на рис. 4.2,б. В результате при подаче , уменьшается , что влечёт, в свою очередь, увеличение тока нагрузки
представлен на рис. 4.2,б. В результате при подаче , уменьшается , что влечёт, в свою очередь, увеличение тока нагрузки  (рис. 4.2,в). Рассмотренные явления для схемы МУ рис. 4.2 несколько искажаются, так как переменный магнитный поток, создаваемый рабочей обмоткой при прохождении по ней тока, наводит ЭДС в обмотке управления. Этих недостатков лишена схема МУ, приведенная на рис. 4.3.
(рис. 4.2,в). Рассмотренные явления для схемы МУ рис. 4.2 несколько искажаются, так как переменный магнитный поток, создаваемый рабочей обмоткой при прохождении по ней тока, наводит ЭДС в обмотке управления. Этих недостатков лишена схема МУ, приведенная на рис. 4.3.
МУ состоит из двух магн топроводов, на каждом из которых располагается рабочая обмотка, причём они включены встречно. Обмотки управления (их может быть несколько -  ,
,  ) охватывают оба магнитопровода. Так как обмотки
) охватывают оба магнитопровода. Так как обмотки  ,
,  включены встречно, то создаваемые в них магнитные потоки
включены встречно, то создаваемые в них магнитные потоки  ,
,  изменяются в в
изменяются в в
противофазе (рис. 4.3,б), т.е. один поток намагничива ет обмотки управления, а вто-
рой - размагничивает.
Результирующая переменная составляющая в итоге будет равна нулю, т.е.
 .
.
В зависимости от рода тока различают:
а) дроссельные МУ (ДМУ), у которых по рабочим обмоткам всегда течёт переменный ток;
б) МУ с самоподмагничиванием (МУС), у которых в рабочих обмотках присутствует постоянная составляющая тока.
На рис. 4.4,а, 4.4,б приведены схемы ДМУ с переменным и постоянным током в цепи нагрузки. Схемы МУС с однополупериодным и двухполупериодным выпрямлением тока нагрузки приведены соответственно на рис. 4.4,в, 4.4,г. Величина тока управления регулируется переменным резистором.

|
4.2.2. Введение обратной связи в МУ
|
Для повышения коэффициента усиления МУ в них вводят обратную связь. В ДМУ для этого используют дополнительную обмотку, аналогичную обмотке управления, по которой пропускают часть тока нагрузки. Рассмотрим эффект введения положительной обратной связи в ДМУ (рис. 4.5,а, 4.5,б).
Напряжённость, создаваемая рабочей обмоткой  и обмоткой обратной связи
и обмоткой обратной связи  , определяется
, определяется
 ;
;  ,
,
где  ;
;  - коэффициент передачи выпрямителя.
- коэффициент передачи выпрямителя.
Коэффициент передачи по цепи обратной связи определяется
 =
=  ,
,
а в интерпретации графика рис. 4.5 он будет
 .
.
Введение сигнала обратной связи приводит к деформации характеристики  . Рассмотрим следующие ситуации.
. Рассмотрим следующие ситуации.
Случай 1:  .
.
Правая полуплоскость.
Рассмотрим картину для тока управления и  :
:
а)  ,
,  - рабочий ток характеризуется точкой
- рабочий ток характеризуется точкой  ;
;
б)  ,
,  - рабочий ток характеризуется точкой
- рабочий ток характеризуется точкой  .
.
Однако амплитуда рабочей точки соответствует току управления  . Следовательно, при том же токе при наличии обратной связи с коэффициентом передачи рабочий ток будет соответствовать точке
. Следовательно, при том же токе при наличии обратной связи с коэффициентом передачи рабочий ток будет соответствовать точке  , где
, где  .
.
Для тока управления  и
и  :
:
а)  ;
;  имеем ток
имеем ток  (точка
(точка  );
);
б) ;  имеем ток
имеем ток  (точка
(точка  ).
).
Рассматривая весь диапазон изменения  , получим кривую
, получим кривую  при введении обратной связи (пунктирная линия); исходная -
при введении обратной связи (пунктирная линия); исходная -  (сплошная линия). Результирующая кривая при введении обратной связи имеет большую крутизну по сравнению с исходной.
(сплошная линия). Результирующая кривая при введении обратной связи имеет большую крутизну по сравнению с исходной.
Левая полуплоскость.
Обратная связь из положительной превращается в отрицательную, что приводит к уменьшению крутизны характеристики  . Рассуждая аналогично для токов
. Рассуждая аналогично для токов  ,
,  и
и  построим точки характеристики.
построим точки характеристики.
Для тока имеем:
а)  ; имеем ток
; имеем ток  (точка 3);
(точка 3);
б) ;  имеем ток
имеем ток  (точка
(точка  ).
).
Значение тока меньше тока и получено при том же токе управления т.е. рабочая точка переносится в точку  .
.
Для тока процедура построения аналогична.
В результате в правой полуплоскости коэффициент усиления возрастает,
а в левой - убывает. Такой режим, когда , используется в усилителях.
Случай 2:  . В коммутационных схемах МУ работают в ключевом режиме. Поэтому здесь характеристика
. В коммутационных схемах МУ работают в ключевом режиме. Поэтому здесь характеристика  должна быть релейной, что можно получить при
должна быть релейной, что можно получить при  (рис. 4.5,г).
(рис. 4.5,г).
Управляющий ток имеет отрицательный знак. Имея это ввиду далее оперируем с его модулем. Выделим два характерных луча обратной связи, соответствующих токам управления  и
и  и являющихся граничными касательными к исходной характеристике
и являющихся граничными касательными к исходной характеристике  .
.
Для тока управления и  :
:
а) ; имеем ток  (точка 1);
(точка 1);
б) ;  имеем ток
имеем ток  . Возможные значения тока нагрузки получены при токе . Точка
. Возможные значения тока нагрузки получены при токе . Точка  является неустойчивой и по достижении этого значения ток сразу же скачком возрастает до значения
является неустойчивой и по достижении этого значения ток сразу же скачком возрастает до значения  и далее скачком до значения
и далее скачком до значения  .
.
Для тока управления и  :
:
а) ; имеем ток  (точка 2);
(точка 2);
б)  ;
;  имеем ток
имеем ток  .
.
Состояние  является неустойчивым, т.е. уменьшение тока происходит скачкообразно со значения до значения
является неустойчивым, т.е. уменьшение тока происходит скачкообразно со значения до значения  .
.
Аналогично характеристика строится и для других значений тока управления. При дальнейшем увеличении крутизна характеристики уменьшается.
В результате при введении обратной связи с коэффициентом передачи больше единицы характеристика  принимает вид петли гистерезиса в зоне нулевых и малых токов управления, а в левой полуплоскости ее крутизна резко уменьшается. . В зоне
принимает вид петли гистерезиса в зоне нулевых и малых токов управления, а в левой полуплоскости ее крутизна резко уменьшается. . В зоне  система неустойчива. При токах управления
система неустойчива. При токах управления  и
и  МУ работает в ключевом режиме. В этом диапазоне должен лежать ток управления МУ работающих в коммутационных режимах. Следует иметь ввиду, что при коммутации цепей переменного тока схема не реверсивная. Одновременно с режимом коммутации происходит усиление сигнала по мощности.
МУ работает в ключевом режиме. В этом диапазоне должен лежать ток управления МУ работающих в коммутационных режимах. Следует иметь ввиду, что при коммутации цепей переменного тока схема не реверсивная. Одновременно с режимом коммутации происходит усиление сигнала по мощности.
4.2.3. Магнитные материалы
Материал магнитопровода должен иметь определённые характеристики. В зависимости от величины коэрцитивной силы различают магнитотвердые (  А/см) и магнитомягкие (
А/см) и магнитомягкие (  А/см) материалы.
А/см) материалы.
Для создания элементов и устройств электроавтоматики применяют главным образом магнитомягкие материалы, которые можно разделить на 3 группы:
1) электротехнические стали;
2) сплавы на основе железа с другими ферромагнитными металлами (никель, кобальт, алюминий);
3) ферриты (неметаллические ферромагнетики).
Электротехнические стали (Э31, Э41, ...) представляют собой низкоуглеродистые стали с повышенным содержанием кремния. Они наиболее дешевы и имеют большие индукции насыщения (1,8 - 2,3 Тл), что позволяет создавать на их основе компактные и дешёвые электромагнитные элементы. Вместе с тем, у них чувствительность к изменению внешнего поля, создаваемого обмотками, невелика.
Железоникелевые сплавы (пермаллои) дороже стали в 15 - 20 раз. Они имеют меньшие значения индукции насыщения, но позволяют получать высокочувствительные элементы за счет малой коэрцитивной силы и высокой начальной магнитной проницаемости. Маркируются 50НП, 65НП (50, 65 -%  ). Общий их недостаток - низкая механическая прочность и чрезвычайная чувствительность к деформациям.
). Общий их недостаток - низкая механическая прочность и чрезвычайная чувствительность к деформациям.
Железокобальтовые сплавы (пермендюры), содержащие от 30 до 50% кобальта (35 КХ и 50 КФА), имеют наиболее высокие значения индукции насыщения (до 2,4 Тл), что позволяет создавать магнитные усилители и другие устройства наименьших габаритных размеров и массы.
Железоалюминиевые сплавы (Ю16, ...), имея среднюю величину индукции насыщения и малую коэрцитивную силу, обладают повышенной (в 10 - 20 раз большей, чем пермаллои) износоустойчивостью. Их широко применяют для изготовления магнитных головок в устройствах магнитной записи, где в процессе работы головка непрерывно трётся о поверхность ленты.
Ферриты (1,3 ВТ; 0,16 ВТ и др.) представляют собой неметаллические магнитные материалы (твёрдые растворы), изготавливаемые из смеси окислов железа с окислами магния, меди, марганца, никеля и других металлов. Общая формула ферритов имеет вид  , где
, где  - тот или иной металл. Они имеют характеристику с ярко выраженной петлёй гистерезиса. Удельное электрическое сопротивление ферритов в миллионы раз больше, чем металлических ферромагнитов, что практически устраняет вихревые токи. Это позволяет перемагничивать ферриты с частотой порядка сотен килогерц.
- тот или иной металл. Они имеют характеристику с ярко выраженной петлёй гистерезиса. Удельное электрическое сопротивление ферритов в миллионы раз больше, чем металлических ферромагнитов, что практически устраняет вихревые токи. Это позволяет перемагничивать ферриты с частотой порядка сотен килогерц.
4.3. ПОЛУПРОВОДНИКОВЫЕ КОММУТАЦИОННЫЕ УСТРОЙСТВА
4.3.1. Транзисторные устройства

|
В рассматриваемых АУ транзисторы работают в режиме транзисторного насыщения ключа (рис. 4.6).
Транзистор работает в ключевом режиме. При  он дополнительно запирается напряжением смещения
он дополнительно запирается напряжением смещения  . Его обратное сопротивление велико и значительно превышает сопротивление
. Его обратное сопротивление велико и значительно превышает сопротивление  . Выходное напряжение ключа, если схема работает для формирования ступенчатого напряжения, определяется
. Выходное напряжение ключа, если схема работает для формирования ступенчатого напряжения, определяется
 ,
,
но так как  , то
, то  . При подаче управляющего тока в цепь базы транзистор полностью открывается. В случае, если нагрузка включена в цепь коллектора (вместо
. При подаче управляющего тока в цепь базы транзистор полностью открывается. В случае, если нагрузка включена в цепь коллектора (вместо  , то при закрытом транзисторе ток нагрузки
, то при закрытом транзисторе ток нагрузки  , а при открытом определяется вольт-амперной характеристикой транзистора и величиной сопротивления нагрузки.
, а при открытом определяется вольт-амперной характеристикой транзистора и величиной сопротивления нагрузки.
4.3.2. Тиристорные устройства
Тиристоры в настоящее время получили широкое распространение, так как позволяют коммутировать большие мощности. Работают всегда согласно своим физическим свойствам в ключевых режимах. Обратимся к вольт-амперным характеристикам диода и тиристора (рис. 4.7).
Тиристор в отличие от диода при прочих равных условиях открывается при подаче импульса тока на управляющий электрод. Закрывается при изменении полярности анодного напряжения или уменьшении его ниже значения, соответствующего напряжения спрямления  .
.

|
Тиристоры применяются в различных схемах, но наиболее широко - в силовых цепях электропривода по схеме широтно-импульсных преобразователей и управляемого выпрямителя различных исполнений. Эти вопросы рассматриваются в курсе «Автоматизированный электропривод».
В настоящее время промышленность выпускает тиристорные пускатели серии ТУР и ПТ, ТПУ. Их можно классифицировать следующим образом:
1. По роду тока нагрузки:
а) для цепей  :
:
- с однополупериодным выпрямлением;
- с двухполупериодным выпрямлением;
б) для цепей  var:
var:
-однофазные;
-трёхфазные.
2. По функциональным возможностям:
а) включено - выключено;
б) включено - выключено - реверс.
3. По наличию защиты:
а) от перегрузок по  ;
;
б) от длительных перегрузок при незначительном превышении номинального тока;
в) от изменения напряжения  ;
;  .
.
Силовая часть пускателя серии ТУР для одной фазы (другие идентичны) приведена на рис. 4.9, а характеристики пускателей ТУР, ПТ даны в табл. 4.1, 4.2. Типоряд тиристрных пускателей по коммутируемой мощности достаточно широк и переркрывает основой диапазон потребителей машиностроительных производств.
Таблица 4.1
| Параметры | Тип | |
| ТУР-3-1 | ТУР-Зр-1 | |
 В В
| 220, З80 | 220, 380 |
| Сигнал управления |  ,полярность отрицательная, одно и двух п/п выпрямление ,полярность отрицательная, одно и двух п/п выпрямление
| |
| Мощность сигнала управления, Вт | 0,05 | 0,05 |
| Мощность выхода, Вт | 250-3500 | 200-7500 |
| Масса, кг | ||
| Габаритныe размеры, мм | 360х190х190 | 370х370х220 |
Таблица 4.2
| Параметр | ПТ-16-38 | ПТ-16-380-Р | ПТ-40-380 | ПТ-40-3800 | ПТУ-63-380 |
 , В , В
| |||||
| Число фаз | |||||
 , А , А
| |||||
 , В , В
| |||||
 , А , А
| 0,3 | 0,3 | 0,3 | 0,3 | 0,3 |
| Масса, кг |

Основные элементы схемы одной фазы (другие аналогичны) работают следующим образом. В положительный полупериод открываются тиристоры VS1, (VS3, VS5) , в отрицательный - VS2 ( VS4, VS6). Группа трансформаторов тока ТТ1( ТТЗ, ТТ5) служит для организации управления тиристорами, а трансформаторов тока ТТ2( ТТ4, ТТ6) для организации защиты от перегрузок. В аварийных режимах защита организована по управляющему электроду - прекращается подача управляющих импульсов.
4.4. ФАЗОВЫЕ ДИСКРИМИНАТОРЫ
Фазовые дискриминаторы (ФД) основаны на принципе коммутации одного сигнала другим. Выходной сигнал ФД пропорционален разности фаз двух сигналов (гармонических или прямоугольных), поданных на его входы. Применяются в основном в качестве элементов сравнения сигналов задания и отработки (поступающих с датчиков обратной связи) в фазовых системах управления. По принципу действия и элементной базе различают ФД четырех типов: электромеханические; электронные на основе управляемых выпрямителей; электронные на основе потенциального триггера и усилителей постоянного тока; электронные с запоминающей ёмкостью и с выходом в цифровом коде.
4.4.1. Электромеханические ФД
|
В простейшем случае ФД состоит (рис. 4.9) из высокочувствительного поляризованного реле, на которое подаётся опорное напряжение  , а контакты его коммутируют цепь нагрузки с сопротивлением
, а контакты его коммутируют цепь нагрузки с сопротивлением  , на которое через контакты реле подаётся преобразуемое (рабочее) напряжение
, на которое через контакты реле подаётся преобразуемое (рабочее) напряжение  . Схема работает по принципу управляемого выпрямителя. Опорный сигнал коммутирует рабочий. Он подключает рабочее напряжение к сопротивлению нагрузки на полупериод опорного сигнала. При этом из синусоиды рабочего сигнала (рис.4.10) «вырезаются» участки длиной в полупериод опорного сигнала.
. Схема работает по принципу управляемого выпрямителя. Опорный сигнал коммутирует рабочий. Он подключает рабочее напряжение к сопротивлению нагрузки на полупериод опорного сигнала. При этом из синусоиды рабочего сигнала (рис.4.10) «вырезаются» участки длиной в полупериод опорного сигнала.

|
Если фазовый сдвиг  (рис. 4.10,а), то имеет место обычное полупериодное выпрямление. Если
(рис. 4.10,а), то имеет место обычное полупериодное выпрямление. Если  =180° (рис. 4.10,б), то на выходе формируется инверсный сигнал. Выходной сигнал является функцией разности фаз опорного и рабочего сигналов (рис. 4.10,в).
=180° (рис. 4.10,б), то на выходе формируется инверсный сигнал. Выходной сигнал является функцией разности фаз опорного и рабочего сигналов (рис. 4.10,в).
Среднее значение тока на сопротивлении нагрузки определяется
 .
.
Вместо поляризованных реле используют вибропреобразователи, например, типа ВПГ-62. Частота питания преобразователя и преобразуемого сигнала, поступаемого с датчиков обратной связи следящих систем, как правило 400, 500, 1000 Гц. В настоящее время электромеханические ФД применяются редко ввиду малого срока службы (200 - 400 ч) коммутирующего элемента и возникающих помех. Большее распространение получили ФД других типов.
4.4.2. Диодные ФД
Наибольшее распространение в преобразовательных аналоговых схемах получили балансные ФД.
Рассмотрим базовую схему однополупериодного ФД (рис. 4.11,а).

|
В преобразовании участвуют напряжения вторичных обмоток трансформаторов:  (рабочее);
(рабочее);  (опорное). Каждая из половинок этой схемы (относительно горизонтальной оси симметрии) представляет собой обычный однополупериодный управляемый выпрямитель. На каждый из этих выпрямителей, работающих в линейном режиме, подается векторная сумма переменных напряжений
(опорное). Каждая из половинок этой схемы (относительно горизонтальной оси симметрии) представляет собой обычный однополупериодный управляемый выпрямитель. На каждый из этих выпрямителей, работающих в линейном режиме, подается векторная сумма переменных напряжений  и
и  . В результате этого на резисторы
. В результате этого на резисторы  и
и  через выпрямители подаются напряжения
через выпрямители подаются напряжения  и
и  , представленные векторами АВ и АС (рис. 4.11,б). При этом
, представленные векторами АВ и АС (рис. 4.11,б). При этом
 ;
;  ;
;
 ;
;  .
.
Так как диоды пропускают ток в одном направлении, то на резисторах , , будут импульсы напряжений , в виде половинок 1 и 2 синусоид разных полярностей, смещённые по фазе относительно друг друга на величину угла  (рис. 4.12).
(рис. 4.12).

Постоянная составляющая ФД и спектральный состав выходного напряжения  определяются путем разложения его в ряд Фурье. Постоянная составляющая будет
определяются путем разложения его в ряд Фурье. Постоянная составляющая будет
Как видно, постоянная составляющая пропорциональна разности амплитуд и не зависит от углов  и
и  .
.
Если  , то
, то
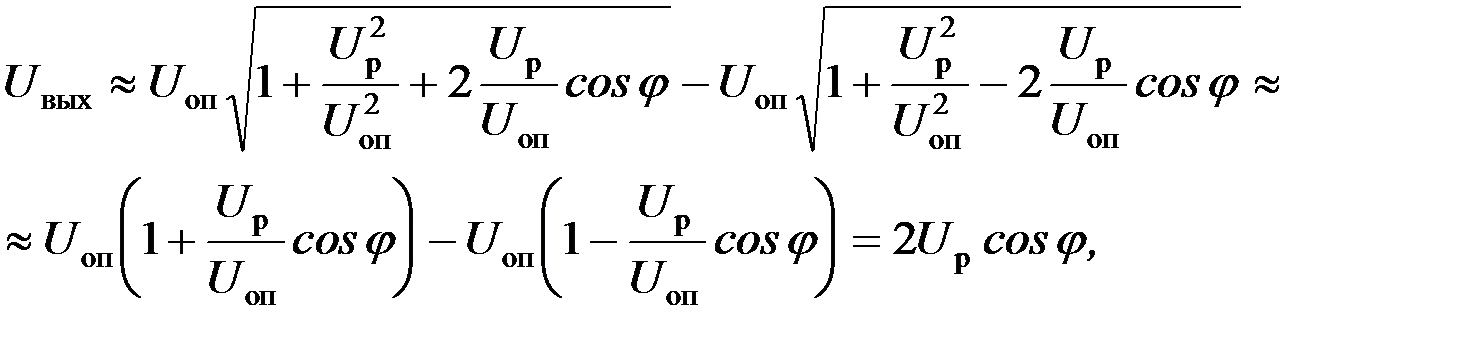
так как полагаем  .
.
За полупериод постоянная составляющая будет
 .
.
Для того, чтобы получить синусоидальную зависимость один из сигналов, как правило опорный, предварительно сдвигают на 90 градусов. Тогда окончательно имеем
 .
.
В зоне малых значений углов будет
 где
где  .
.
Меньшие пульсации и больший (в 2 раза) уровень выходного сигнала имеет двухполупериодный балансный (рис. 4.13,а) и кольцевой ФД (рис. 4.13,б). Первый представляет собой сочетание включённых на общую нагрузку двух однополупериодных ФД, работающих поочередно в каждый полупериод.
Рассмотрим работу кольцевого ФД . В преобразовании участвуют также напряжения вторичных обмоток трансформаторов:  - рабочее
- рабочее  ;
;
 - опорное
- опорное  . Опорное напряжение выполняет коммутирующие функции. Путь тока нагрузки рассматриваем от опорного напряжения трансформатора . Полярность напряжений на обмотках трансформаторов соответствует первому рассматриваемому ниже случаю для первого полупериода.
. Опорное напряжение выполняет коммутирующие функции. Путь тока нагрузки рассматриваем от опорного напряжения трансформатора . Полярность напряжений на обмотках трансформаторов соответствует первому рассматриваемому ниже случаю для первого полупериода.
Ток в цепи нагрузки течёт по цепи:
при  :
:
в 1-й п/период (точки): a - f - g - i - k -  - b,
- b,  ;
;
во 2-й п/период (точки): c - d - e - h - k - - b, ;
при  : в 1-й п/период (точки): b - - k - h - e - f - a,
: в 1-й п/период (точки): b - - k - h - e - f - a,  ;
;
во 2-й п/период (точки): b - - k - i - g - d - c, .

Для лучшего использования схемы необходимо выполнять условие
 .
.
4.4.3. ФД на основе статического триггера
Эта группа основана на использовании аналоговых и дискретных элементов. Рассмотрим построение и работу типовой схемы дискриминатора. ФД (рис. 4.14,а) состоит из усилителей-ограничителей (УО), формирователей импульсов (ФИ), инвертора аналогового сигнала И1, RS-триггера и усилителя постояннго тока (УПТ). В точках B и В' формируются положительные импульсы в моменты изменения полярности напряжений ,  на +. При =180° (рис. 4.14,б) скважность выходных импульсов триггера составляет 0,5. Токи
на +. При =180° (рис. 4.14,б) скважность выходных импульсов триггера составляет 0,5. Токи  ,
,  в сопротивлениях
в сопротивлениях  и
и  равны, имеют одинаковую длительность и =0. При
равны, имеют одинаковую длительность и =0. При  0 скважность импульсов на выходе Т1 меняется, причем при
0 скважность импульсов на выходе Т1 меняется, причем при  180°
180°  <0,5 (рис. 4.14,в), при
<0,5 (рис. 4.14,в), при  180° > 0,5. Это приводит к уменьшению тока в одном плече балансного УПТ и увеличению в другом.
180° > 0,5. Это приводит к уменьшению тока в одном плече балансного УПТ и увеличению в другом.
В результате изменяются знак и амплитуда выходного напряжения. Выходная характеристика имеет вид (рис. 4.15). Линейная зона ФД составляет 180°. Для приведения характеристики к виду  на У02 подают инверсный сигнал
на У02 подают инверсный сигнал  .
.
4.4.4. ФД с запоминающей ёмкостью
В этой группе ФД можно выделить две разновидности - на основе импульсного ключа и с двойным преобразованием фазы.
Упрощенная схема ФД на основе импульсного ключа с запоминающей ёмкостью приведена на рис. 4.16. Сущность ее работы состоит в следующем.Ёмкость С заряжается путем периодического подключения с интервалом, равным периоду рабочего сигнала Тр на время  через ключ с низким входным сопротивлением
через ключ с низким входным сопротивлением  . Разряд конденсатора производится в течение остальной части периода при отключённом ключе через большое сопротивление нагрузки . Постоянная времени цепи заряда конденсатора выбирается из условия его полного заряда, т.е.
. Разряд конденсатора производится в течение остальной части периода при отключённом ключе через большое сопротивление нагрузки . Постоянная времени цепи заряда конденсатора выбирается из условия его полного заряда, т.е.  .
.
Зарядившись до полного напряжения , которое было в момент импульса  , ёмкость С почти сохраняет свой заряд до появления следующего импульса, так как постоянная цепи разряда
, ёмкость С почти сохраняет свой заряд до появления следующего импульса, так как постоянная цепи разряда  .
.
Если в момент очередного подключения импульсом , на заряд  , то ёмкость подзаряжается до нового значения
, то ёмкость подзаряжается до нового значения  , а если
, а если  , то она разрядится до значения .
, то она разрядится до значения .

|
Характеристика ФД на статическом триггере и УПТ (рис. 4.15) симметрична
|
относительно значения фазового сдвига  . Для приведения ее симметрии относительно нуля градусов предварительно смещают один из сигналов на 180 градусов. Принципиальным ограничением ФД это группы является определение фазового сдвига только с отрицательным знаком, то есть когда рабочий сигнал только отстает от опорного. Это является существенным ограничением их применения в системах управления и в особенности в следящих и самонастраивающихся.
. Для приведения ее симметрии относительно нуля градусов предварительно смещают один из сигналов на 180 градусов. Принципиальным ограничением ФД это группы является определение фазового сдвига только с отрицательным знаком, то есть когда рабочий сигнал только отстает от опорного. Это является существенным ограничением их применения в системах управления и в особенности в следящих и самонастраивающихся.
В ФД с коммутирующим ключом и запоминающей емкостью выходной сигнал не имеет идеальной формы ступенек, так как в течение времени  происходит разряд конденсатора С по экспоненте на резисторе нагрузки. Параметры и С, кроме того, выбираются из условия обеспечения требуемой относительной амплитуды пульсаций
происходит разряд конденсатора С по экспоненте на резисторе нагрузки. Параметры и С, кроме того, выбираются из условия обеспечения требуемой относительной амплитуды пульсаций
 , т.к.
, т.к.  .
.

|
Наряду с этой группой ФД используются ФД, основанные на принципе двойного преобразования фазового сдвига в уровень постоянного напряжения и сохранения его в течение периода до окончания следующего измерения. Преобразование выполняется в два этапа: 1- преобразование фазового сдвига во временной интервал; 2 - преобразование временного интервала в уровень напряжения (рис.4.17). ФД работает следующим образом.
Усилители ограничители (УО1, УО2) преобразуют синусоидальные сигналы в ступенчатые. Формирователи импульсов (ФИ1, ФИ2) формируют разнополярные импульсы в моменты изменения полярности опорного  и рабочего
и рабочего  напряжений при переходе их через нулевые значения в соответствии со знаком производной.
напряжений при переходе их через нулевые значения в соответствии со знаком производной.

|
Диод V1 пропускает на S-вход RS триггера только положительные импульс: тем самым устанавливая его в единичное состояние в начале каждого периода опорного сигнала. С установкой триггера T1 в единичное состояние сбрасываются ключи K1, K2. При этом ключ K2 подключает к источнику линейно-нарастающего напряжения (на схеме не показан) один из конденсаторов С1 или С2 (например С1). Другой в это время подключен ключём K4 на считывание. Ключ К1 разрешает прохождение импульса в канале  на R-вход триггера. Импульс в канале рабочего напряжения устанавливает триггер в нулевое состояние. Ключ K2 отключает конденсатор от источника напряжения заряда. В результате выполнено двойное преобразование: 1) фазовый сдвиг преобразован во временной интервал; 2) временной интервал преобразован в уровень напряжения на конденсаторе -
на R-вход триггера. Импульс в канале рабочего напряжения устанавливает триггер в нулевое состояние. Ключ K2 отключает конденсатор от источника напряжения заряда. В результате выполнено двойное преобразование: 1) фазовый сдвиг преобразован во временной интервал; 2) временной интервал преобразован в уровень напряжения на конденсаторе -  . Конденсаторы С1, С2 подключаются поочередно на заряд ключом K2 и считывание ключом K4 в момент окончания текущего преобразования сдвига фаз согласно диаграммам рис. 4.17,б, рис. 4.17,в. Ёмкость С1 работает в периоды 1, 3, 5, ..., а емкость С2 в периоды 2, 4, 6, ... . Перед подключением каждого конденсатора на заряд с него производится сброс напряжения ключом КЗ в начале очередного периода. Селектором знака фазового сдвига является полярность импульса в канале рабочего напряжения. Если фазовый сдвиг отрицательный (рис. 4.17,б), то полярность этого импульса положительна, если фазовый сдвиг положительный (рис. 4.17,в), то она отрицательна. Постоянные времени цепи разряда и заряда конденсатора выбираются аналогично предыдущей схеме. В схеме используются две ёмкости, ёмкость С2 не показана. Выходная характеристика линейна в пределах
. Конденсаторы С1, С2 подключаются поочередно на заряд ключом K2 и считывание ключом K4 в момент окончания текущего преобразования сдвига фаз согласно диаграммам рис. 4.17,б, рис. 4.17,в. Ёмкость С1 работает в периоды 1, 3, 5, ..., а емкость С2 в периоды 2, 4, 6, ... . Перед подключением каждого конденсатора на заряд с него производится сброс напряжения ключом КЗ в начале очередного периода. Селектором знака фазового сдвига является полярность импульса в канале рабочего напряжения. Если фазовый сдвиг отрицательный (рис. 4.17,б), то полярность этого импульса положительна, если фазовый сдвиг положительный (рис. 4.17,в), то она отрицательна. Постоянные времени цепи разряда и заряда конденсатора выбираются аналогично предыдущей схеме. В схеме используются две ёмкости, ёмкость С2 не показана. Выходная характеристика линейна в пределах  180 град (рис. 4.17,г). Линейная зона без труда может быть увеличена до значений 2П и более.
180 град (рис. 4.17,г). Линейная зона без труда может быть увеличена до значений 2П и более.
На этом принципе преобразования фазового сдвига во временной интервал строятся и цифровые ФД. При этом временной интервал, пропорциональный фазовому сдвигу, заполняется импульсами определенной частоты, которые суммируются счетчиком. По окончании измерения код счетчика и будет кодом величины фазового сдвига, а запомненный признак полярности импульса в канале рабочего напряжения - признаком знака фазового сдвига.
Дата добавления: 2018-09-24; просмотров: 871;