Электрические двигатели
В приводах строительных машин применяют электродвигатели переменного и постоянного тока.
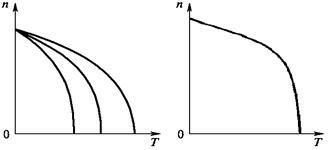
Асинхронные электродвигатели переменного тока, короткозамкнутые и с фазным ротором (называют также двигателями с контактными кольцами). Они обычно питаются от электросети напряжением 220 и 380 В с нормальной частотой 50 Гц. Эти двигатели конструктивно просты, дешевы, надежны и удобны в эксплуатации. Их недостатком является высокая чувствительность к колебаниям напряжения в питающей сети. Типовая механическая характеристика 3 асинхронного электродвигателя показана на рис.13, где через Т и n, как и прежде, обозначены соответственно вращающий момент и частота вращения вала двигателя. Считается, что двигатель работает на естественной механической
 Рис.13. Естественная (3) и пусковые (реостатные) (1 и 2) характеристики асинхронного электродвигателя
Рис.13. Естественная (3) и пусковые (реостатные) (1 и 2) характеристики асинхронного электродвигателя
|
характеристике, если он включен в сеть с напряжением и частотой, соответствующими указанным в его паспорте, а также если в его электрическую схему не включены дополнительные сопротивления. В противном случае получаем искусственную механическую характеристику. Рабочим является участок механической характеристики между точками с координатами (Т= 0; п = n0) и (Т= Тк; п = nк).
Момент Т = Тн и частота вращения п = пн на этом участке являются номинальными, соответствующими наибольшему ресурсу двигателя. Перегрузочная способность асинхронных двигателей общего назначения
определяется отношением максимального момента Тк к номинальному Тн на естественной характеристике: kпер=Тк/Тн составляет 1,7...2,0 (для короткозамкнутых двигателей до 2,4), а для двигателей кранового типа - 2,3... 3,0. Частота вращения вала двигателя n на рабочем участке механической характеристики изменяется незначительно, в связи с чем естественную механическую характеристику асинхронного двигателя можно считать жесткой.
Момент Тп при n=0 называют пусковым. Его отношение к номинальному моменту Тн для короткозамкнутых двигателей общего назначения составляет 1,0... 1,9, а для двигателей кранового типа 2,3...3,0. Для двигателей с фазным ротором это отношение составляет 0,5... 1,5, тогда как пусковой ток превышает номинальный в 5 —7 раз. Для уменьшения пускового тока этих двигателей в цепь обмотки ротора с помощью реостата включают дополнительные сопротивления. Каждому сопротивлению в цепи ротора соответствует своя искусственная механическая характеристика, называемая также реостатной.
Так, например, при включении в цепь ротора двух пусковых сопротивлений, которым соответствуют искусственные характеристики 1 и 2, момент при пуске будет изменяться от Т1 до Т2, которые называют моментами отсечки. После включения двигателя он будет работать на характеристике 1. При этом момент будет уменьшаться от ТА (не обязательно совпадающего с Т2) до Т1), а частота вращения вала увеличиваться от нуля до nВ При достижении последнего сопротивление, соответствующее характеристике 1, автоматически отключается, вследствие чего момент увеличивается до значения Т = Т2 с переходом на реостатную характеристику 2. При этом двигатель разгоняется до частоты nС с одновременным уменьшением момента до Т = Т1, а после отключения второго сопротивления переходит на естественную характеристику 3 в точке С' с координатами (Т2; nC). Пуск заканчивается по достижении точки на естественной характеристике с моментом, равным моменту внешних сопротивлений ТD. Маршрут пуска показан на рис.13 стрелками. Обязательным условием пуска является условие Т1 > ТD. В противном случае уже на первом этапе (участок АВ) частота п = nB не будет достигнута, а, следовательно, первое сопротивление не будет отключено, и дальнейшая работа возможна только на искусственной характеристике 2. При необходимости указанное условие обеспечивается снижением момента ТD, в частности, путем отключения трансмиссии или исполнительного механизма от двигателя.
Искусственные характеристики, обладающие меньшими жесткостями по сравнению с естественной, используются в качестве рабочих характеристик, когда необходимо плавно изменять скорости рабочих движений. Короткозамкнутые двигатели запускаются и работают только на естественной характеристике.
Электродвигатели постоянного тока обеспечивают большую плавность пуска и торможения
 а б
Рис.14. Механические характеристики приводов постоянного тока
а б
Рис.14. Механические характеристики приводов постоянного тока
|
механизмов по сравнению с двигателями переменного тока. На рис.14,а представлены механические характеристики приводов, работающих по системе трехобмоточный генератор — двигатель. Они применяются, в частности, на экскаваторах средней мощности. Форма характеристики может быть изменена соответствующим подбором ампер-витков трех обмоток генератора: независимой, шунтовой и сериесной. На рис. 14,б показана механическая характеристика привода постоянного тока по системе генератор ‑ двигатель с электромашинными усилителями, применяемого на экскаваторах большой мощности. Такие характеристики имеют участки малой и повышенной жесткости, что позволяет применять их как в приводах рабочих органов или исполнительных механизмов, требующих плавности изменения скоростей рабочих движений, так и при стабильной скорости, независящей от изменения внешней нагрузки.
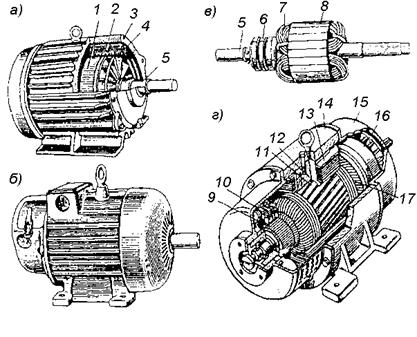
| Рис.15. Электродвигатели переменного тока асинхронный с короткозамкнутым ротором (а) и с фазным ротором (б, в), постоянного тока (г): 1 ‑ ротор: 2 ‑ обмотка статора; 3, 14 ‑ корпус; 4 ‑ пакет из электротехнической стали; 5 ‑ вал; 6 - контактные кольца; 7 ‑ обмотка фазного ротора; 8 ‑ пакет фазного ротора; 9 ‑ коллектор; 10 - щетки; 11 ‑ якорь; 12 - главный полюс; 13 - катушка обмотки возбуждения; 15 ‑ подшипниковый щит; 16 ‑ вентилятор; 17 ‑ обмотка якоря |
Дата добавления: 2018-06-28; просмотров: 512;