Тема 5. Автоматизоване проектування траси
Вимоги до траси автомобільної дороги
Трасування автомобільних доріг здійснюється з урахуванням, в першу чергу, вимог зручності та безпеки транспортного руху. Щоб дорога найкращим чином задовольняла цим вимогам, необхідно забезпечити можливість руху одиночних автомобілів з розрахунковими швидкостями, а транспортних потоків зі швидкостями, нормованими залежно від категорії проектованої дороги і щільності цього потоку.
Поєднання елементів плану та поздовжнього профілю повинні правильно орієнтувати водіїв в подальшому напрямку траси за межами фактичної видимості. При проектуванні траси для транспортного руху слід уникати: кривих малого радіуса; різких поворотів за переломами поздовжнього профілю; перетинанні доріг в одному рівні в умовах незабезпеченої видимості; ділянок переплетень і злиття транспортних потоків місцевого та транзитного руху з різними швидкостями; довгих прямих, особливо перехідних в криві малого радіуса.
Одним з найбільш радикальних засобів забезпечення найкращих умов зручного і безпечного руху є ландшафтне проектування. Методи ландшафтного проектування отримали значний розвиток в роботах Бабкова В. Ф..
Ландшафтне проектування передбачає вирішення ряду взаємопов'язаних завдань:
Забезпечення зорової плавності траси. Забезпечення просторової плавності автомобільних доріг зводиться до реалізації при проектуванні наступних принципів поєднання елементів плану та поздовжнього профілю: довжини прямих і кривих повинні бути співрозмірні; кількість переломів у плані і профілі має бути по можливості однаковою; слід прагнути поєднувати вершини вертикальних і горизонтальних кривих, допускаючи зміщення їх вершин відносно одна одної не більше, ніж на ¼ довжини меншої з них; необхідно уникати поєднань елементів траси, що створюють провали видимості. Всебічну оцінку зорової плавності траси шляхом побудови перспективних зображень ділянок проектованої дороги з різних точок зору.
Реалізація принципів " оптичного трасування ", коли різними прийомами ( посадка дерев і чагарників і т.д. ) забезпечується чітке уявлення про подальший напрямок дороги за межами фактичної видимості.
Забезпечення плавного і гармонійного вписування автомобільної дороги в навколишній ландшафт і дотримання вимог охорони навколишнього середовища.
Поліпшення існуючого природного ландшафту шляхом включення впроект різних заходів (посадка дерев і чагарників на придорожній смузі; планувальні та осушувальні роботи, створення штучних водойм з доданням земляному полотну на ділянках перетинань видатків функцій гідротехнічних гребель; розкриття або маскування окремих елементів ландшафту і т.д.).
У сучасних умовах при трасуванні доріг також особлива увага приділяється питанням охорони навколишнього середовища. Вирішення цієї проблеми досягається за допомогою:
Прокладання доріг в обхід цінних сільськогосподарських угідь; заповідників; лісових масивів; водоохоронних зон; природних, історичних та культурних пам'яток; місць проживання цінних тварин та інших територій, де будівництво та експлуатація дороги можуть мати особливо несприятливі наслідки для навколишнього середовища.
Віднесення автомобільної дороги з інтенсивним транспортним рухом від населених пунктів на відстань, що забезпечить захист населення від шкідливих викидів автомобілів і транспортного шуму.
Призначення параметрів і поєднання геометричних елементів дороги, що забезпечують рівномірний режим руху транспортного потоку, при якому знижується рівень шкідливого впливу автомобільного транспорту на довкілля.
При трасуванні доріг необхідно враховувати значне число вимог і умов, викладених вище. Однак найчастіше проектні рішення, які максимально відповідають якомусь критерію або критеріям, не відповідають іншим. Звідси випливає, що трасування доріг є багатокритеріальної завданням і кінцевою метою її вирішення є знаходження варіанту траси, що забезпечує розумний компроміс у задоволенні всіх перерахованих вище вимог і умов.
Принципи проектування траси в плані
Методи трасування автомобільних доріг засновані на принципах "гнучкої лінійки " і " полігонального трасування ".
При трасуванні доріг в САПР за принципом "гнучкої лінійки" здійснюється безпосереднє укладання траси автомобільної дороги та розрахунок базису ( полігонального ходу для виносу траси в натуру). При цьому тип заокруглень може бути як завгодно складним в сенсі комбінації геометричних елементів трасування. Проте методи трасування, засновані на цьому принципі, застосовуються до цих пір рідко, як з огляду непідготовленості інженерних кадрів, так і через методологічну незавершеність і.
Традиційний принцип трасування доріг, який прийнято називати принципом "полігонального трасування", до цих пір є домінуючим в практиці проектування в переважній більшості проектних організацій. Методи, які засновані на цьому принципі, відносяться до евристичних.
Методи «однозначно визначеної осі»
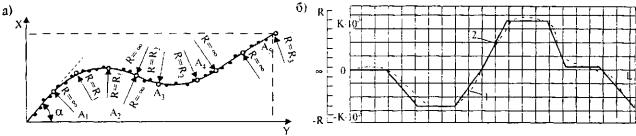
Суть цих методів полягає в тому, що призначається полігональний ( тангенційний ) хід і в кожен злам цього ходу послідовно вписуються заокруглення. І якщо розрахунок заокруглень містить певний математичний алгоритм, то спосіб призначення самого тангенційного ходу грунтується лише на інтуїції і професійному досвіді інженера- проектувальника.
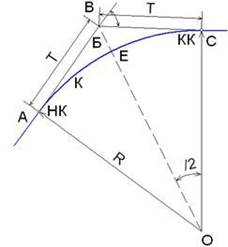
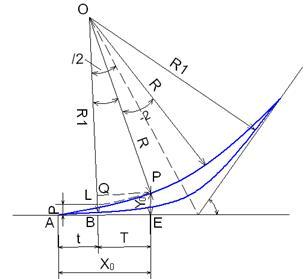
Основні елементи заокруглень в плані з радіусами кривих, які вимагають сполучення з прямими ділянками траси за допомогою допоміжних перехідних кривих
Методи «згладжування ескізної лінії траси»
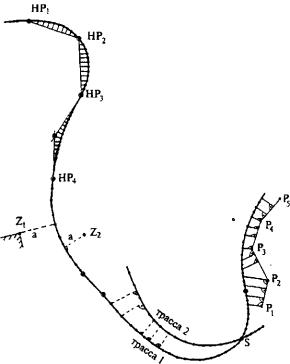
Метод «згладжування ескізної лінії траси», розроблений в кінці 60-х років в США і розвинений у Німеччині, полягає в задаванні координат послідовності точок, що знімаються з ескізного варіанту траси, з подальшою аналітичної апроксимацією за допомогою алгебраїчних поліномів високих ступенів. На відміну від методів «однозначно визначеної осі» в методі «згладжування ескізної лінії траси» задають надмірна кількість точок ескізної лінії і в загальному випадку через всі задані точки не може бути проведена задовільна траса. Ці точки ескізної лінії тому розглядають як «наближені», поблизу яких повинна пройти траса.
Сплайн- трасування
Найбільш відповідними функціями є сплайни як універсальний математичний апарат для опису, зберігання, перетворення, аналізу та подання геометричних форм елементів, в першу чергу трас проектованих автомобільних доріг.
Постановка завдання трасування на основі сплайнів повинна припускати наступне: вершини інтерполяції ескізної траси, а в разі реконструкції- існуючої траси, призначаються наближено (з допуском) і точне їх місце розташування обчислюється за певними закономірностями, пов'язаними з мінімізацією функціоналу згладжуючих сплайнів.
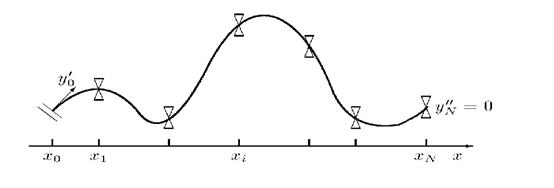
Інтерполяційні сплайни. Як відомо, термін "сплайн" походить від назви креслярського інструменту - тонкої металевої або дерев'яної лінійки, яка згинається так, щоб проходити через задані точки ( xi, yi = f ( xi )).
Тоді сплайн в положенні рівноваги приймає форму, яка мінімізує його потенційну енергію. І в теорії балок встановлено, що ця енергія пропорційна інтегралу по довжині дуги від квадрата кривизни сплайна :
При умовах S (xi) = yi.:
У проектній практиці застосовують, як правило, сплайни 1-го і 3- го ступеня.
Сплайни 1-го ступеня (лінійні) служать, по-перше, хорошою і доступною ілюстрацією до розуміння процесів побудови сплайнових алгоритмів, по-друге, достатні для опису геометричних елементів доріг, що представляються у вигляді ламаних ліній (магістральні та тангеційні ходи, поздовжні і поперечні профілі землі і т.д.).
Сплайни 1-го ступеня. Сплайни 1-го ступеня (ламані) досить прості для розуміння і, в той же, час, відображають основні властивості сплайн-функцій. З математичної точки зору, сплайн 1-го ступеня – це кусочно-безперервна функція, на кожному відрізку описувана рівнянням виду :
y = ai + bix,
де i – номер розглянутого інтервалу між вузлами інтерполяції xi і xi +1.
Сплайни 3-го ступеня. Сплайни 3-го ступеня (кубічні) – це кусочно-безперервна (безперервність 1-й і 2-й похідних) функція, що складається з відрізків кубічних парабол.
В даний час існує безліч алгоритмів побудови та розрахунку на ЕОМ кубічних сплайнів, що обумовлено широким їх використанням у вирішенні технічних завдань, пов'язаних з інтерполяцією кривих і поверхонь.
Згладжуюючіі сплайни. В якості математичного апарату для розв'язання задачі трасування доріг застосовують згладжуюючі сплайни, які мінімізують функціонал виду:
при обмеженнях, наприклад,
У записі функціоналу q = 1, 2; S(xi) – сплайн; i – ваговий коефіцієнт вузла інтерполяції; f0(xi) – функція початкового наближення.
Обмеження можуть бути найрізноманітнішими і у випадку трасування доріг це: обмеження за допустимим радіусом, напрямком траси в плані і ухилом в поздовжньому профілі і т. п. При цьому для сплайнів третього ступеня повинні бути додані так звані "крайові умови" в точках x0 = a, xn = b, які забезпечують єдиність побудови сплайна. Наприклад, це можуть бути умови заданого початкового і кінцевого напрямків проектованої ділянки траси S (xa), S (xb).
Криві Безьє. У1970 р. П'єр Безьє (французький математик) підібрав складові параметричного кубічного многочлена таким чином, що їх фізичний зміст став дуже наочним і вельми відповідним для вирішення багатьох прикладних завдань, в тому числі і для цілей проектування доріг за принципом "тангенціального трасування".
Формула Безьє для кубічного многочлена(n = 3) має наступний вигляд.
нехай ri =  , i = 0, 1, 2, 3, тоді для 0 ≤ t ≤ 1:
, i = 0, 1, 2, 3, тоді для 0 ≤ t ≤ 1:

або в матричній формі:
Матриця M називається базисної матрицею кубічної кривої Безьє. Крива, представлена у формі Безьє, проходить через точки r0 і r3, має дотичну в точці r0, спрямовану від r0 до r1, і дотичну в точці r3, спрямовану від r2 до r3. Прямі Р0Р1, р1р2 і Р2Р3 утворюють фігуру, звану характеристичної (визначальною) ламаної, яка й зумовлює обриси кривої Безьє.
Щоб побудувати криву, задають точки A і F, через які має проходити крива, потім на бажаних дотичних до цієї кривої в точках A і F задають точки B і E. Змінюючи довжини відрізків AB і EF варіюють накресленням кривої, надаючи їй бажану форму. 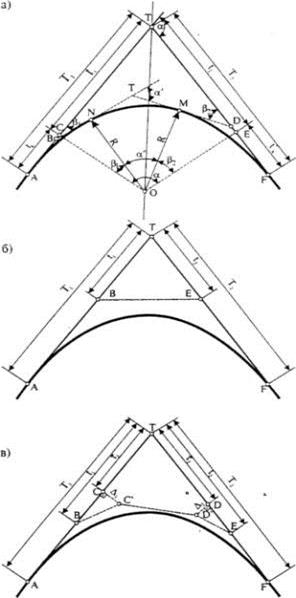
Трасування сплайнами ще не отримало широкого практичного застосування, однак пілотні проекти доріг зі сплайн- трасами вже реалізовані в Німеччині, Англії, Росії та показали, що такі дороги мають високі споживчі якості.
Просторове трасування автомобільних доріг
Якщо форма плоскої кривої визначається функцією її кривизни, то форма просторової кривої однозначно визначається сукупністю двох функцій: кривизни та кручення. Кривизна (К) і радіус кривизни ( R = 1 / К) просторової кривої мають той же геометричний зміст, що і для плоскої кривої, але обчислюється, природно, за складнішою залежності:

де x, x – перша, друга похідні x по l і т. д.:
На порушення зорової плавності також впливає і відхилення лінії від пласкої форми, яке в перспективі створює вигляд просадки проїзної частини.
В загальному розумінні кручення – це міра відхилення просторової кривої від дотичної площини.
Якщо уявити собі, що деяка площина переміщується в просторі (рис.), причому її фіксована точка (автомобіль) з одиничною швидкістю (рівномірно, без прискорення) рухається по кривій (трасі), фіксована пряма в кожен момент часу дотикається до кривої в цій точці, а сама площина весь час лишається дотичною площиною кривої. Тоді таке переміщення буде результатом поступального руху і двох обертальних – обертання навколо бінормалі та її обертання навколо дотичної. Кутова швидкість першого обертання дорівнює кривизні кривої, а другого – абсолютному крученню кривої в точці дотику.
Отже, чим менше кручення, тим більш плавною і безпечною з точки зору умов руху є просторова крива траси автомобільної дороги.
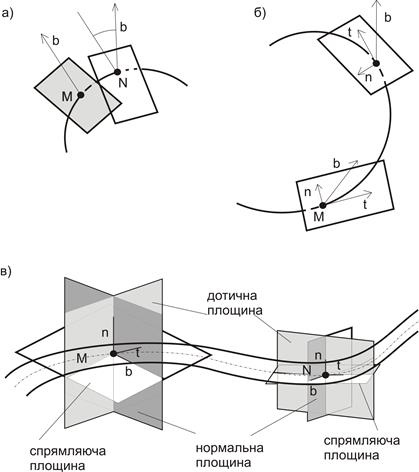
Рис. Кручення просторової кривої
а - геометрична інтерпретація кручення, б - схема для визначення кручення, в - супровідні тригранники просторової кривої
Якщо відомо аналітичне представлення лінії траси основні геометричні характеристики визначають за наступними формулами:
- якщо крива описується параметричними рівняннями, то кривизна виражається

де  - похідні по будь-якому параметру;
- похідні по будь-якому параметру;
- якщо за параметр прийнята координати х, то
- для визначення величини кручення відповідно:
або
Якщо при роздільному трасуванні необхідно контролювати графіки кривизни траси в плані і поздовжньому профілі, то при просторовому трасуванні контроль повинен здійснюватися за графіками просторової кривизни та кручення.
Дата добавления: 2017-11-04; просмотров: 890;