Лекция 2. Встроенные управляющие компьютеры. SCADA системы и управление в реальном времени. Работа персонала в составе АСУ
Универсальная природа основных особенностей цифровых автоматизированных и автоматических систем управления. Квантование по времени.
Встроенные в системы компьютеры, управляющие процессами функционирования систем, решают задачи, отличные от задач «классической обработки» информации. Основное отличие состоит в том, что управляющий компьютер должен работать со скоростью, соответствующей скорости процесса, динамика которого может быть весьма быстрой.
Другая особенность компьютерных технологий управления процессами заключается в том, что часто ход исполнения ПО нельзя определить заранее из -за необходимости реагировать на внешние события. Внешние сигналы могут прерывать исполнение ПО и тем самым изменять последовательность исполнения программ ПО.
Третья особенность связана с необходимостью обеспечения безопасности управления системой. Поэтому функции аварийной защиты обязательно поддерживаются ПО таких компьютеров.
Цифровыми системами мы будем называть дискретные системы с Управляющей ЦВМ, в которых происходит квантование как по уровню, так и по времени. В тоже самое время в импульсных системах автоматического управления квантование осуществляется только по времени.
Встроенные компьютеры (контроллеры) в АСУТП, системах управления промышленными объектами выполняют функции звена, перерабатывающего информацию с датчиков и вырабатывающего в автоматическом режиме управляющие воздействия на исполнительные органы системы. Во встроенные компьютеры в той или иной форме вводится информация от человека – оператора (системы более высокого уровня иерархии), содержащая исходные данные, настройки или целевые программы управления. Но большую часть своих функций встроенные ЦВМ выполняют в автоматическом режиме без вмешательства оператора.
 |
Пока ЦВМ обрабатывает информацию другая порция информации в нее не вводится. И с этой точки зрения состояние ОУ в ЦВМ не наблюдаемо. Рассмотрим на рисунке эти три фазы управления от ЦВМ. За время ненаблюдаемости и неуправляемости фазовые координаты объекта управления меняются под действием возмущений и начальных условий на момент начала неуправляемости.Поэтому выдаваемое в конце третьей фазы управляющее воздействие уже не соответствует состоянию объекта управления на момент t3, а соответствует состоянию на момент t1, и не приведет объект управления в желаемое состояние. Поэтому в цифровых системах управления циклы управления повторяются, т.е. ЦВМ решает набор задач управления с определенным периодом в течение всего времени работы системы. Величина периода повторения решения зависит от динамики системы. Это - универсальная особенность работы цифровых автоматизированных и автоматических систем любого назначения. Например, она прослеживается и в системе управления самолетом от БЦВМ и в системе управления кадрами предприятия, когда сводку о наличном составе кадров необходимо готовить по крайней мере раз в день для расчета бухгалтерией зарплаты. Имеющиеся на нашей временной диаграмме окна в реальных системах не уничтожаются, а наоборот расширяются для организации многозадачной работы ПО.
Квантование по уровню в цифровых системах управления
Второй эффект квантования связан с тем, что представление данных в компьютере происходит в ограниченной разрядной сетке (16, 32, 64 разряда). Т.е. с определенной разрешающей способностью. Чем выше разрядность компьютера, тем точнее представлены данные.
Этот эффект начинается с АЦП, который имея ограниченное число разрядов преобразует аналоговый сигнал с погрешностью в цену половины младшего разряда. Далее идут интересные факты уже при машинном счете.
Имеет место свойство цифровых вычислительных машин (ЦВМ) – округление арифметических операций, так как результат, например умножения, двух 32-разрядных чисел занимает 64 разряда.
Арифметическое устройство 32-разрядной машины позволяет разместить эти 64 разряда в сумматоре, но далее его надо переписать в память или регистр, а они 32-разрядные. Поэтому, результат при пересылке в память или регистры ЦВМ округляется.
Младшие разряды отбрасываются вплоть до 32 разрядов. При этом, если старший из отбрасываемых разрядов 1, то в младший оставшийся добавляют 1; если 0, то ничего не добавляется. Т.е. возникает погрешность с математическим округлением младшего разряда на каждой операции. Каждая последующая операция уже над полученными неточными числами увеличивают эту погрешность.
 В длинной цепочке последовательных операций (формульный счет) эта погрешность постепенно растет.
В длинной цепочке последовательных операций (формульный счет) эта погрешность постепенно растет.
Эта погрешность захватывает все большее и большее число младших разрядов результата. Это может продолжаться до тех пор, пока ошибка вычисления конечного результата превышает допустимый по точности решения задачи уровень.
Выход из данной ситуации – использовать ЦВМ с большей длиной разрядной сетки либо использовать имеющийся во многих архитектурах ЦВМ операции с двойной длинной операндов и результатов.
В последнем случае эти операции выполняются на программно-аппаратном уровне, и потому очень сильно, на порядок и более, снижают быстродействие ЦВМ, но зато повышается точность представления результатов. Как говорят, точность разменивается на время. В программировании это можно сделать всегда.
Надо отметить, что эффект нехватки точности из-за разрядной сетки в цифровых системах управления (САУ) характерен для ограниченного числа вычислительных задач с длительным формульным счетом.
Для большинства задач управления этот эффект мало заметен и маскируется точностью АЦП при вводе данных с аппаратуры и частым их обновлением.
Тем не менее, использование ЦВМ с максимально доступным числом разрядов данных уменьшает все проблемы точности вычислений. Именно поэтому как только позволяет технология микроэлектроники, так формат данных удваивается.
С квантованием по уровню связаны не только вычислительные операции ПО. Квантование по уровню начинается в АЦП с ввода информации с непрерывных датчиков и других источников информации.
Наличие в цифровых системах квантования по уровню делает их принципиально нелинейными, со всеми вытекающими отсюда последствиями и возможностью установление автоколебаний. Правда, поскольку шаг квантования по уровню весьма мал, возможная амплитуда таких автоколебаний также мала. При уменьшении шага квантования q (при увеличении числа уровней квантования и числа разрядов цифрового кода вводимых данных) цифровая система приближается по своим свойствам к импульсной.
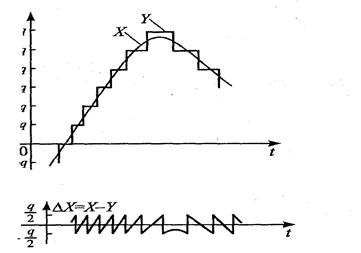
Рис.2.12. Эквивалентная схема квантования сигнала по уровню
Как показано на рис.2.12 квантованный по уровню сигнал Y можно представить как неквантованный сигнал X с наложенной на него ошибкой квантования  X.
X.
X = X-Y
Ошибка квантования является при этом случайной величиной, меняющейся в диапазоне  При малом шаге квантования, что имеет место в большинстве практически важных случаев, принимается, что ошибка квантования распределена равномерно относительно нулевого значения. В этом случае дисперсия ошибки равна q2/12 [27,50].
При малом шаге квантования, что имеет место в большинстве практически важных случаев, принимается, что ошибка квантования распределена равномерно относительно нулевого значения. В этом случае дисперсия ошибки равна q2/12 [27,50].
Таким образом, при достаточно малом шаге квантования по уровню возможно пренебрегать этим эффектом при исследовании динамики цифровой системы. В крайнем случае можно учесть наличие на входе шума с приведенными параметрами. При достаточно большом шаге квантования по уровню сведение цифровой системы к импульсной может привести к большой ошибке. В дальнейшем рассмотрении динамических вопросов мы полагаем достаточно малым шаг квантования по уровню и рассматриваем цифровую систему как импульсную.
Рассмотренные принципы цифрового управления имеют универсальный характер и справедливы как для АСУ, так и для систем автоматического управления (САУ). Но в контуре управления АСУ задействован человек, динамические характеристики даже лучших экземпляров которого, оставляют желать лучшего.
Низкая скорость работы и невысокая надежность, падающая с увеличением скорости, вот проблемы, с которыми сталкиваются разработчики АСУ. В связи с этим эффективное конструирование человеко-машинного интерфейса и уменьшение нагрузки на человека - направление работ по улучшению характеристик АСУ.
Работа персонала в составе АСУ
Обычно рассматриваются три группы задач, решаемых человеком в АСУ:
- управление объектом в процессе штатного функционирования,
- техническое обслуживание и ремонт объекта,
- управление объектом в процессе нештатной – аварийной ситуации
Основная проблема при этом – низкая надежность человека, как элемента АСУ.
Типы ошибок персонала - ошибок -промахов для всех этих задач одинаков:
- пропуск – не выполнение требуемой по алгоритму операции,
- некачественное выполнение операции, требуемой по алгоритму,
- нарушение следования операций,
- замещение операций вместо требуемой выполняется другая,
- нарушение своевременности операций,
- выполнение ложных операций, отсутствующих в алгоритме.
Это операторские ошибки, совершаемые в процессе эксплуатации АСУ. Ошибки, совершаемые человеком на стадии проектирования, разработки и изготовления нами здесь не рассматриваются.
Наиболее значимыми факторами, влияющими на частоту ошибок являются запас времени на принятие решения, факторы стресса, сложность и критичность задачи, характеристики инструкций по выполнению функций персонала, характеристики человеко-машинного интерфейса.
Объем информации, поступающей к человеку извне, оценивается в 109 бит/сек ,из которых только100 бит/сек обрабатывается сознанием. Мозг имеет ограниченные возможности по обработке информации. Если количество информации, поступающей в единицу времени возрастает, то способность к обработке теряется и внимание концентрируется только на её части.
Методология определения численных показателей надежности человека -оператора также базируется на массовом эксперименте. При этом предварительно необходимо составление перечня действий человека по упралению конкретной АСУ.
Для иллюстрации вероятностей ошибок человека-оператора приведем некоторые данные по ошибкам в нормальных условиях его деятельности:
-при восприятии устного сообщения(1-3 слова) вероятность ошибки 0,0002,
- при чтении(1-3 слова) вероятность ошибки 0,0010,
- при восприятии показаний цифрового прибора вероятность ошибки 0,0012,
- при нажатии требуемой клавиши вероятность ошибки 0,005,
- при выборе переключателя вероятность ошибки 0,0001,
При напряженной работе, при которой быстро происходит смена ситуаций вероятность ошибки 0,2-0.3.
Интерфейс пользователя – видимая часть системы управления и единственная с которой взаимодействует человек. Интерфейс пользователя должен способствовать повышению ответственности, облегчать работу, и уменьшать вероятность ущерба от человеческих ошибок.
Следует признать необходимым элементом интерфейса оператора подтверждение опасных с точки зрения целостности информации и системы действий оператора.
Встроенные компьютеры. SCADA системы и управление в реальном времени.
Встроенные в системы компьютеры редко работают в офисных условиях. Чаще всего они работают в очень тяжелых условиях по температуре (- 40º + 85º С ), механическим нагрузкам - вибрации, удары, по давлению, влажности, запыленности, радиационному фону и т.п.
Поэтому их конструктивное исполнение отличается от исполнения РС и существует целая отрасль производства промышленных компьютеров (другое широко используемое название - контроллеров).
Наличие монитора, мыши и клавиатуры для них в процессе работы в автоматическом режиме не обязательно. Однако, полностью исключать необходимость участия в работе технических промышленных систем оператора нельзя. Например, при наладке автоматической системы, разборе и устранении нештатных ситуаций необходимо обязательно участие человека и соответственно средств доступа к ПО системной ЦВМ. Часто встроенный промышленный компьютер работает в АСУТП, где имеется оператор, следящий за ходом процесса управления и имеющий возможность в него вмешаться.
В этих случаях используется двухуровневое техническое решение, когда встроенный промышленный компьютер (нижний уровень) подключается к РС (верхний уровень), по сетевым технологиям, a оператор сидит и работает за монитором и клавиатурой РС верхнего уровня, имея доступ в промышленный компьютер - в его ПО дистанционно по линии связи. По этой же линии связи в РС поступает информация из промышленного компьютера, необходимая для работы системы.
Это же двухуровневое решение может быть использовано как инструментальное средство при отладке ПО контроллера. В этом случае. недостающие промышленному контроллеру отладчик, клавиатура и монитор находятся в ПК верхнего уровня.
Во многих случаях это двухуровневое решение может быть сделано универсальным, что привело к созданию универсальных пакетов программ управления SCADA (Supervisory Control and Data Acquisition) для непосредственного программного управления технологическим оборудованием на базе контроллеров (специализированных компьютеров, называемых промышленными), которые встроены в технологическое оборудование. В состав SCADA входят совершенные средства отображения информации управления для оператора на РС верхнего уровня, а также средства, позволяющие оператору вмешиваться в управление системой также из РС верхнего уровня.
Примеры : Genius, ULTRA Logic, Trаce mode.
В качестве языка программирования в SCADA реализован язык функциональных блоковых диаграмм (Function Block Diagram или FBD), представляющий пользователю механизм объектного визуального проектирования и программирования для IBM PC совместимых компьютеров серии Микро РС (Octagon Systems и т.п.) и контроллеров .Эти популярные компьютеры и контроллеры широко представлены на рынке систем промышленной автоматизации.
Непосредственный процесс разработки алгоритмов в SCADA заключается в создании функциональной схемы зависимостей выходных переменных от входных и “сборке” с помощью “мыши” программ из готовых “кубиков” – функциональных блоков в среде специального графического редактора.
Редактор содержит такие операции как вызов из библиотеки функциональных блоков, копирование, перемещение и удаление объектов, ввод связей между объектами, ввод комментариев. Библиотеки, поставляемые в составе SCADA систем, охватывают весьма широкий спектр типовых алгоритмов автоматического управления, сбора и обработки данных и сигналов, а также библиотеки драйверов всех модулей ввода-вывода, которыми комплектуются технические средства.
Программы на языке FBD напоминают электрические и логические принципиальные схемы и формально соблюдают алгоритмы их работы.
Язык FBD стандартизован (стандарт МЭК-61131-3)
 |  |  |  | ||||
 |
В рассмотренной далеко не полной классификации компьютерных технологий по назначению слишком много классов и трудно выделить общие свойства в различном по назначению ПО.
Классификацию компьютерных технологий можно улучшить, вводя в рассмотрение понятия:
Информационные системы,
системы «реального времени»
критические системы,
распределенные системы,
системы автоматически управляемые встроенным ПО
Системы реального времени изучаются интенсивно в специальных курсах. Но с точки зрения ПО - это ПО, ориентированное на управление. Тогда как в информационных системах – работа ПО ориентированна на хранение передачу и обработку данных. Основной характеристикой информационных систем кроме характеристик по хранению, поиску и управлению транзакциями является характеристики человеко- машинного интерфейса.
Для встроенного ПО, которое практически всегда - ПО реального времени, человеко -машинный интерфейс ограничен и ограничивается использованием его при наладке системы и отладке ПО .
Отказ ряда систем, управляемых с помощью ПО, может привести просто к потере времени, неудобствам и т.п. Наряду с этим существуют системы, отказы которых приводят к большим экономическим потерям, авариям ,к гибели людей. Такие системы обычно называют критическими. Высокая функциональная надежность- требование к ПО таких систем.
Для ПО и технических средств критических систем используются специальные методы конструирования, программирования, отладки, гарантирующие безопасность, защищенность и безотказность.
Точно также разработка программ реального времени приводит к особенностям технологии и необходимо при разработке учитывать и подсчитывать время работы ПО, результат работы которого нужен не вообще, а к определенному моменту функционирования системы. Так с запозданием определенный автомобильным компьютером сигнал в систему АBS в лучшем случае бесполезен. За рассмотренными видами ПО стоят разные требования к технологии разработки, вытекающие из различных требований прикладной области.
Децентрализация технических средств предполагает реализацию функциональных подсистем сложной АС на рабочих станциях, персональных компьютерах, промышленных компьютерах непосредственно на рабочих местах.
Для объектов, распределенных на большой территории, например в различных зданиях, удаленных друг от друга филиалах, либо таких объектов как перекачивающие станции (газ, нефть), электрические сети и т.п. единственной возможной структурой оказывается распределенная структура.
Распределенное управление по разнесенным элементам структуры системы, распределенные вычисления, обеспечивающие необходимую производительность, необходимость использования больших информационных ресурсов - практические задачи , стимулирующие появление и развитие вычислительных сетей.
Техническое и программное обеспечение компьютерных технологий
Техническое обеспечение - комплекс технических средств, обеспечивающих работу автоматизированной системы, документация на эти средства и технологические процессы.
Комплекс технических средств составляют:
• компьютеры (любых платформ);
• устройства сбора, накопления, обработки и вывода информации;
• устройства передачи/приема данных и линии связи;
• оргтехника и другие вспомогательные устройства;
• эксплуатационные и расходные материалы и др.
К настоящему времени сложились две основные формы организации технического обеспечения (формы использования технических средств) — централизованная и распределенная.
Математическое и программное обеспечение - совокупность математических методов, моделей, алгоритмов и программ для реализации целей и задач автоматизированной системы, а также нормального функционирования комплекса технических средств.
К средствам математического обеспечения относятся:
• средства моделирования систем и процессов управления;
• типовые алгоритмы управления оборудованием и процессами;
• методы математической теории систем, системотехники, математической статистики, теории массового обслуживания, математического программирования и др.
В состав программного обеспечения входят общесистемные и специальные программные продукты, а также техническая документация,
К общесистемному программному обеспечению относятся комплексы программ, ориентированных на пользователей и предназначенных для решения типовых задач обработки информации и управления. Они служат для расширения функциональных возможностей компьютеров, контроля и управления процессом обработки данных.
Специальное программное обеспечение представляет собой совокупность программ, разработанных при создании конкретной автоматизированной системы. В его состав входят пакеты прикладных программ, реализующие разработанные модели разной степени адекватности, отражающие функционирование реального объекта.
Техническая документация на программные средства должна содержать описание задач, их алгоритмизацию, экономико-математическую модель задачи, контрольные примеры.
Дата добавления: 2017-11-04; просмотров: 427;