Позиция контроллера управления Х-3
На позиции Х2 произошла остановка СД на 17 позиции ГРК за счет стоп-реле; так же как это было на 15 позиции. Чтобы скорость троллейбуса еще возросла необходимо педаль контроллера управления нажать до упора. Это будет позиция Х-3, что соответствует 18 позиции ГРК. После того как вал ГРК дойдет до 18.позиции, троллейбус достигнет максимальной скорости. На этой позиции СД не может повернуть вал ГРК дальше не только из-за стоп-реле, но и потому что есть механический упор.
В цепи управления СД обесточен из-за стоп-реле, а все три лампочки гнализации позиций горят. В силовой цепи токопрохождение будет следующим:
+Т==> РР=> АВ=> ЛК1=> РТ=> В1=> ЛКЗ=> ТЭД=> РУ1=> РМТ=> А1=> В2=j> Р=> РкШ=> Рк12 => Pnll => РН2 => ЛК2 => -Т2 (рис.30).
Режим выбега
При сбрасывании ходовой педали в нулевое положение выключаются все кулачковые элементы контроллера хода КВ. Сначала исчезает напряжение с катушки ЛКЗ и катушки РВ, а катушки контакторов ЛК1 и ЛК2 некоторое время остаются включенными, при помощи контактов РВ. Ток на эти катушки проходит по цепи:
+АБ =» П2 => ВУ1=> ЛК1=> РВ => ТК(О)=» Т =» РТ=> РН=> ЛК1=> -АБ (рис.ЗО).
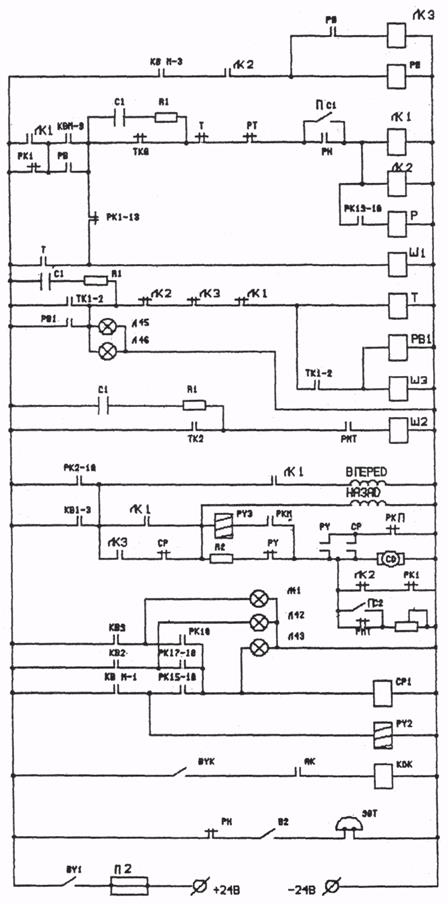
Рис.30. Принципиальная электрическая схема цепи управления
Выдержка на отключение реле времени 0,7 сек. При размыкании силовых контактов ЛКЗ в цепь ТЭД вводятся сопротивления РТ2 и РТ1 и ток в цепи ТЭД уменьшается. Через 0.7 сек. линейные контакторы ЛК1, ЛК2 разрывают силовую цепь. Такое отключение уменьшает подгорание контактов линейных контакторов и исключает бросок гока. После отключения ЛК1, ЛК2 блок-контакт ЛК1 размыкает цепь питания обмотки возбуждения серводвигателя "вперед", а другие блок-контакты ЛК1 замыкают цепь питания обмотки "назад":
+АБ => П2 => ВУ1=ф РК 2-18=» ЛК1=ф РВ=>'"ОВ "назад" (рис.30).
Якорь СД получает питание по цепи:
(+АБ)=> П2=> ВУ1=ф РК2-18=> ЛК1=> Р2=» РУ=> СД =* -АБ
(рис.30).
Групповой реостатный контроллер возвращается на первую позицию, причем скорость вращения больше вследствие того, что сопротивление Р1 = 10 ом отключено. При проходе реостатного контроллера к первой позиции, размыкается РК2-18 и серводвигатель теряет питание. Поэтому до 1-ой позиции контроллер доходит по инерции. Последующее включение ЛК1, ЛК2 возможно только после возвращения ГРК на первую позицию.
Дата добавления: 2017-09-19; просмотров: 514;