Структура и назначение АКС.
Электронные навигационно-информационные компьютерные системы являются центральной основной частью современных автоматизированных комплексов судовождения (АКС). Автоматизированный комплекс судовождения представляет собой интегрированную систему, выполняющую различные функции судовождения и контроля его безопасности и содержащую средства информационной поддержки решений судоводителя. Современные АКС называются интегрированными мостиками (IBS - Integrated bridge systems).
НИКС позволяют создавать различные конфигурации АКС. Под конфигурацией комплекса понимается входящая в него совокупность устройств, образующих комплекс определенной мощности. Мощность системы - это характеристика объема решаемых ей задач. Под базовой конфигурацией понимают минимальный комплект системы, достаточный для ее нормального функционирования.
Базовая конфигурация АКС включает НИКС, ГК, лаг, приемник GPS. Стандартную конфигурация АКС на базе ECDIS образует ECDIS, сопряженная с ГК, лагом, РЛС, САРП, приемниками GPS, Loran-C, средствами связи. Мощные автоматизированные комплексы судовождения включают ECDIS, навигационные датчики (ГК, лаг, РЛС, САРП, транспондер АИС, эхолот, приемник NAVTEX и др.), системы контроля технических средств, устройства и системы управления движением судна по курсу и скорости, средства связи. В этих системах ECDIS берет на себя часть функций по управлению судном и становится навигационной информационно-управляющей системой.
Выполняемые НИКС функции зависят от конфигурации АКС, в которой она работает, и от особенностей задач, решаемых судном.
Так как современные средства и системы судовождения являются компьютеризованными, то АКС - это своего рода компьютерная сеть, включающая различные системы, используемые при судовождении. Конфигурация технического и программного обеспечения АКС может быть различной. Она обычно приспосабливается к особенностям задач, решаемых конкретным типом судов, и зависит от финансовых возможностей судовладельца.
АКС с разветвленной конфигурацией позволяет планировать маршрут судна, вести исполнительную прокладку с отображением положения и пути судна на электронной карте, контролировать безопасность плавания, получать необходимые для судовождения сведения из хранимых в памяти АКС баз данных и от внешних источников информации через каналы связи, помогать оценивать состояние мореходности судна, оперативную обстановку в районе плавания, с мостика управлять движением судна по курсу и скорости, контролировать работу приборов и систем, и выполнять другие необходимые при проводке судна операции.
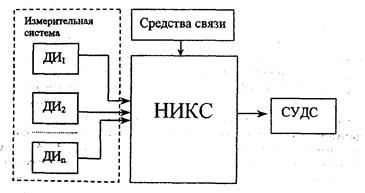
Рис. 2.1. Блок-схема АКС.
В современном автоматизированном комплексе судовождения могут быть выделены следующие системы (рис. 2.1):
• Система получения оперативной информации о процессе судовождения (измерительная система), включающая различные датчики информации (ДИ);
• Системы связи для получения оперативной информации об обстановке в районе плавания, на пути следования и производства радиопереговоров;
• Навигационно-информационная компьютерная система, включающая пульт управления с системами регистрации данных, предупредительной и аварийной сигнализации;
• Система управления движением судна (СУДС).
Измерительная система включает в себя датчики информации: ГК, лаг, радиолокатор, САРП, эхолот, приемоиндикаторы СНС и РНС, позволяющие получить путем измерений информацию о положении и элементах движения своего и встречных судов; приемник NAVTEX; транспондер Автоматической идентификационной системы (AIS). Напомним, что транспондером называется приемо-передающее средство, которое автоматически передает ответный сигнал на определенный внешний запрос с береговой станции или с другого судна, и излучает запрашивающий сигнал по команде оператора. Ответный сигнал может включать идентификационный код судна, данные об элементах его движения и другие сведения. УКВ транспондеры устанавливают на судах для передачи информации о судне, его курсе и скорости по запросу береговой станции и других судов, оборудованных этими средствами. Они повышают безопасность расхождения судов и позволяют усовершенствовать береговой контроль за движением судов.
Системы связи дают возможность получить сведения для поддержания карт и навигационных пособий на уровне современности, принять оперативную информацию об изменении обстановки на пути следования и опасных для судовождения явлениях. Они также используются для передачи сообщений и радиопереговоров.
Навигационно-информационная компьютерная система является центральной системой, управляющей работой АКС. Она обеспечивает выполнение функций навигации, предупреждения столкновений судов, сигнализации об опасных ситуациях, контроля технических средств, управления движением судна, снабжения судоводителя необходимой информацией для обеспечения безопасного судовождения и др.
Система управления движением судна реализует функции управления судном, обеспечивая изменение его кинематических параметров требуемым образом. Она включает в себя систему управления курсом и траекторией судна, автоматизированную дистанционную систему управления главной движительной установкой и дистанционные системы управления активными средствами управления.
Автоматизированный комплекс судовождения, в котором НИКС выполняет функции центра контроля и управления движением судна, создает возможности управления судном одним человеком. В составе мирового флота уже имеется класс автоматизированных транспортных судов, на которых разрешено управление, судном одному человеку в открытом море и в прибрежных водах (следует; отметить, что никто в настоящее время не считает, что только один. судоводитель на мостике способен обеспечить безопасное плавание в стесненных водах). На этих судах ходовой мостик является единственным постом управления, на котором непрерывную вахту несет в море судоводитель. Машинное, отделение полностью автоматизировано и обеспечивает возможность безвахтенного обслуживания судовых силовых установок и механизмов.
Классификационные общества по-разному назвали этот класс судов, например: Регистр Ллойда (Англия) - "NAV1", Германский Ллойд -"NAV-OC", Норвежский Веритас - "W1-OC", Американское Бюро судоходства - "ОМВО". Чаще всего эти суда называют OMBO-ships (One Man Bridge Operated ships). Основными классификационными обществами, а также Международной ассоциацией классификационных обществ (МАКО) разработаны минимальные требования к оборудованию ходовых мостиков судов такого класса и установлены специальные знаки в символе класса судна.
Дата добавления: 2017-06-02; просмотров: 1428;