РАЗОМКНУТЫЕ И ЗАМКНУТЫЕ САУ.
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ.
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Под управлением технологическим процессом понимается совокупность операций, необходимых для осуществления таких целей, как пуск и остановка технологического процесса, поддержание какого-либо параметра процесса на заданном уровне, изменение параметра по заданной программе и т.п.
Установку, машину, агрегат, в котором протекает исследуемый технологический процесс, называют объектом управления.Управление может быть ручным или автоматическим. В первом случае операции управления осуществляет человек, а во втором – управляющее устройство. Сочетание объекта управления и управляющего устройства образует систему автоматического управления (САУ).
Рис.11.1. К понятию системы автоматического управления
На работу системы автоматического управления влияют различные воздействия. Будем называть их входными воздействиями, входными величинами или просто входами (xвх) (рис.11.1).
Параметры процесса, которые в той или иной степени характеризуют его качество и изменяются под действием входных величин, будем называть выходными величинами или просто выходами(xвых). Входные воздействия, которые нарушают заданный закон изменения выходных величин, будем называть возмущающими воздействиями или просто возмущениями. Возмущения можно подразделить на два вида: нагрузку (Н) и помехи (П). Изменение нагрузки обычно обусловлено технологическим процессом, а помехи вызываются изменениями внешних условий (например, температуры окружающей среды) или свойств отдельных элементов системы.
Воздействие управляющего устройства на объект управления называется управляющим воздействием (У).Оно также относится к входным воздействиям.
ОБРАТНЫЕ СВЯЗИ.
При построении системы автоматического управления широко применяют обратные связи.
Обратную связь называют внешней, если она соединяет выход системы с ее входом, и внутренней или местной, если она соединяет выход одного или группы элементов системы с их входом.
Если подача выходной величины элемента системы на его вход усиливает действие входной величины на выходную, то такая обратная связь называется положительной.
Обратная связь называется отрицательной, если подача выходной величины элемента системы на его вход ослабляет действие входной величины на выходную.
По характеру передачи воздействий обратные связи делятся на жесткие и гибкие. Жесткая связь действует как в установившемся, так и в переходном режиме, гибкая действует только в переходном режиме, а в установившемся режиме ее действие прекращается.
РАЗОМКНУТЫЕ И ЗАМКНУТЫЕ САУ.
Системы автоматического управления делятся на разомкнутые и замкнутые.
Разомкнутыми называются такие системы автоматического управления, в которых отсутствует внешняя обратная связь и, следовательно, отсутствует контроль результата управления.
В разомкнутой САУ с жесткой программой(рис.11.2,а) на управляющее устройство подается жесткое задание З. Управляющее устройство оказывает воздействие У на объект управления в соответствии с этим заданием. Под действием некоторого возмущенияxвх (например, изменение нагрузки) могут возникнуть отклонения выходной величиныxвых объекта от задания. Однако эти отклонения в разомкнутой САУ с жесткой программой не контролируются и не влияют на работу управляющего устройства.

Рис.11.2. Разомкнутые системы автоматического управления (САУ)
К таким системам относятся, например, системы автоматического пуска и остановки насосов, вентиляторов, компрессоров и т.п.
Замкнутыминазывают системы автоматического управления, в которых имеется обратная связь, обеспечивающая контроль выходной величины (рис.11.3,а).
При этом управляющее устройство формирует управляющее воздействие У в зависимости от отклонения входной величины xвых от задания З.
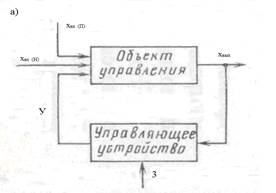
Рис.11.3.Замкнутая по отклонению (а) САУ
Дата добавления: 2016-05-11; просмотров: 19283;