Поколения промышленных роботов.
Промышленный робот — автономное устройство, состоящее из механического манипулятора и перепрограммируемой системы управления, которое применяется для перемещения объектов в пространстве в различных производственных процессах.
Роботы первого поколения часто называют программными. Эти роботы предназначены для выполнения запрограммированной последовательности операций по четкой программе, составленной с учетом требований того или иного технологического процесса. Особенно эффективно применение роботов первого поколения при неизменных и строго определенных условиях эксплуатации. Поэтому они широко внедряются в производство при выполнении простейших операций сборки, установки, снятия, транспортирования и упаковки изделий. Однако благодаря простоте изменения программы, заложенной в память системы управления робота, возможно переобучение его путем перепрограммирования на выполнение другого класса операций.
Роботы второго поколения называют адаптивными. Системы управления этими роботами имеют более широкий по сравнению с программным набор датчиков информации о состоянии внешней среды и характеризуются большей сложностью. Алгоритм управления роботами второго поколения значительно сложнее, чем роботами с жесткой программой, и часто имеет ситуационный характер, что требует реализации его с помощью микроЭВМ или микропроцессора. Благодаря широко развитому программному обеспечению, наличию совершенных устройств системы очувствления роботы второго поколения способны приспосабливать свое поведение к изменяющейся обстановке.
Роботы третьего поколения называют интеллектуальными или разумными. Функциональные возможности этих роботов значительно расширены, от имитации физических действий человека до автоматизации элементов его интеллектуальной деятельности. По сравнению с адаптивными роботами они характеризуются значительно более сложной системой управления, включающей элементы искусственного интеллекта. Благодаря этому интеллектуальные роботы способны воспринимать разговорный язык и вести диалог с человеком, распознавать и анализировать различные ситуации, строить модель внешней среды, обучаться навыкам, программировать движения, усваивать понятия, планировать поведение в разнообразных условиях эксплуатации. В настоящее время выпускается большое число робототехнических устройств, различающихся по компоновочным схемам и конструктивному исполнению.
3. Практическая задача: Рассчитать основные характеристики апериодического (инерционного) звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена.
Передаточная функция:
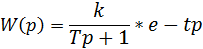
,где k - коэффициент усиления звена;T — постоянная времени, характеризующая инерционность звена. Чем больше постоянная времени звена, тем дольше длится переходный процесс.t–время запаздывания
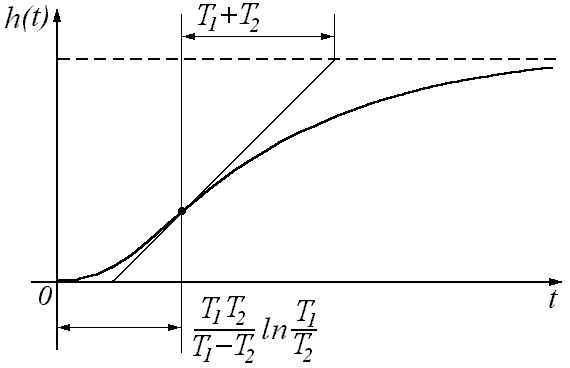
Переходная характеристика:
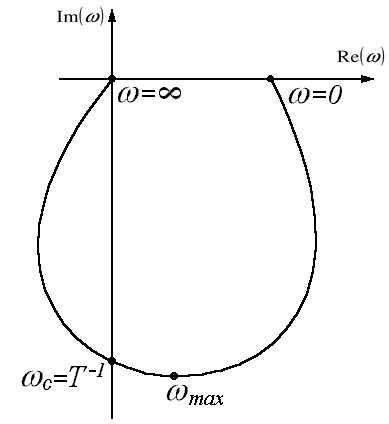
КЧХ:

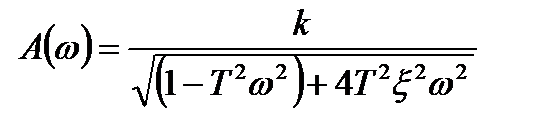
АЧХ:
 6 идеального дифференцирующего звена; дифференцирующего звена
6 идеального дифференцирующего звена; дифференцирующего звена
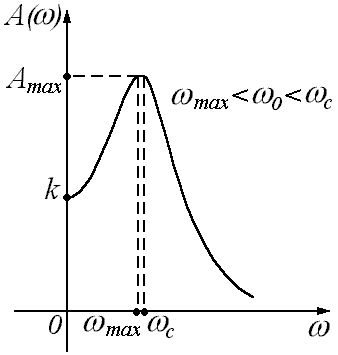
АЧХ при частоте 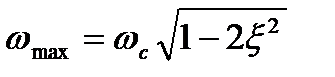 имеет максимум (резонансный пик), равный
имеет максимум (резонансный пик), равный
 .
.
Отсюда видно, что, чем меньше коэффициент x, тем больше резонансный пик.
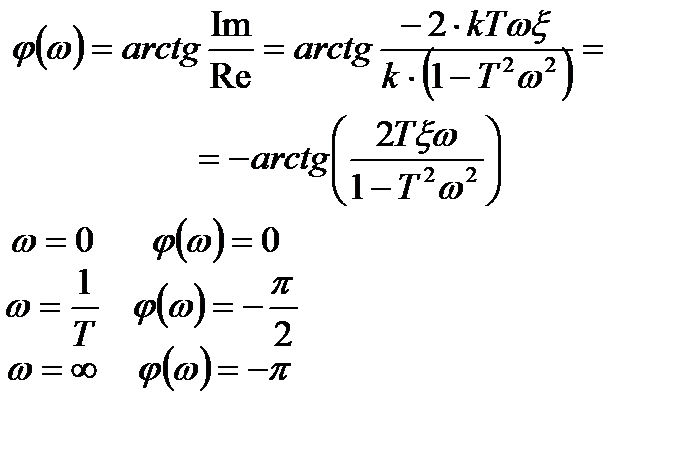
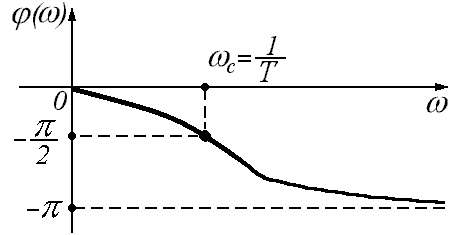
ФЧХ:
Пример использования апериодического звена второго порядка:
RC-цепь с двумя емкостями.
Двигатель постоянного тока с независимым возбуждением.
Дата добавления: 2016-05-11; просмотров: 474;