Статические характеристики ИП
 Статическая характеристика – функциональная зависимость между входной и выходной величинами в установившемся режиме. Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение.
Статическая характеристика – функциональная зависимость между входной и выходной величинами в установившемся режиме. Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение.
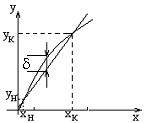
Она может быть представлена коэффициентом, уравнением, графиком или таблицей. Уравнение линейной характеристики записывается следующим образом:

Здесь В – некоторая постоянная (const),
К – коэффициент преобразования,
у0 – сигнал холостого хода,
 х0 – зона нечувствительности.
х0 – зона нечувствительности.
При В=0 график проходит через начало координат.
При В>0 характеристика смещена по оси абсцисс на величину холостого хода, при этом у0=В.
При В<0 характеристика имеет зону нечувствительности от 0 до х0.
На участке:
от 0 до хН: у= К·х,
 от хН до ∞: у=уН.
от хН до ∞: у=уН.
Если на характеристики выделить линейный участок, в пределах которого работает преобразователь, то разность между верхним и нижним значениями выходного (входного) сигнала определяют как рабочий диапазон ΔР преобразователя, а их отношения – динамический диапазон ΔД.
Рабочий диапазон (operating range) датчика определяется допустимыми верхним и нижним пределами значения входной величины или уровня выходного сигнала.
Порог чувствительности – линейное значение входного сигнала, вызывающее заметное изменение выходного сигнала.
Важными статическими параметрами также являются: чувствительность, разрешающая способность или разрешение, линейность, дрейф нуля и полный дрейф, повторяемость и воспроизводимость результата.
Чувствительность (sensitivity) датчика определяется как отношение величины выходного сигнала к единичной входной величине.
Разрешение (resolution) - это наименьшее изменение измеряемой величины, которое может быть зафиксировано и точно показано датчиком.
Линейность (linearity) не описывается аналитически, а определяется исходя из градуировочной кривой датчика. Статическая градуировочная кривая показывает зависимость выходного сигнала от входного при стационарных условиях. Близость этой кривой к прямой линии и определяет степень линейности. Максимальное отклонение от линейной зависимости выражается в процентах.
Дрейф (drift) определяется как отклонение показаний датчика, когда измеряемая величина остается постоянной в течение длительного времени. Величина дрейфа может определяться при нулевом, максимальном или некотором промежуточном значении входного сигнала. При проверке дрейфа нуля измеряемая величина поддерживается на нулевом уровне или уровне, который соответствует нулевому выходному сигналу, а проверка дрейфа на максимуме выполняется при значении измеряемой величины, соответствующем верхнему пределу рабочего диапазона датчика. Дрейф датчика вызывается нестабильностью усилителя, изменением окружающих условий (например, температуры, давления, влажности или уровня вибраций, параметров электроснабжения или самого датчика (старение, выработка ресурса, нелинейность и т. д.)
Повторяемость (repeatability) характеризуется как отклонение между нескольким последовательными измерениями при заданном значении измеряемой величины в одинаковых условиях, в частности приближение к заданному значению должно происходить всегда и либо как нарастание, либо как убывание. Измерения должны быть выполнены за такой промежуток времени, чтобы не проявлялось влияние дрейфа. Повторяемость обычно выражается в процентах от рабочего диапазона.
Воспроизводимость (reproducibility) аналогична повторяемости, но требует большего интервала между измерениями. Между проверками на воспроизводимость датчик должен использоваться по назначению и, более того, может быть подвергнут калибровке. Воспроизводимость задается в виде процентов от рабочего диапазона, отнесенных к единице времени (например, месяцу).
Погрешности.
Истинное значение измеряемой величины – значение, идеально точно отражающее свойство объекта в количественном отношении.
Действительное значение измеряемой величины – значение измеряемой величины, настолько близко к истинному значению, что для решения текущей прикладной задачи может быть использована вместо истинного значения.
Реально при оценке параметров используют датчики, оценивается погрешность.
Погрешность измерения – отклонение измеряемой величины от действительного значения.
Зная погрешность ИП в результате многократных, хаотичных измерений можно его скорректировать.
Абсолютное значение погрешности измерения характеризует отклонение измеряемой величины от действительного значения в единицах измеряемой величины.
Относительная погрешность – отношение абсолютной погрешности измерения к текущему значению измеряемой величины, выраженное в процентах.
Приведенная погрешность – отношение абсолютной погрешности к диапазону измерения.
Основная погрешность – погрешность измерения, которой обладает измерительное устройство при его применении в нормальных условиях эксплуатации.
Например, относительная и приведенная погрешность могут рассматриваться в …. Точках характеристики, а основная – во всем диапазоне измерений в нормальных условиях, то есть при условиях, написанных в паспорте.
Очень часто у приборов нормируется основная погрешность.
Дополнительная погрешность– погрешность, вызываемая изменениями внешних условий по сравнению с нормальными эксплуатационными условиями, часто выражающихся в процентах, отнесенных к единице возмущения, следствием которого явилась это погрешность.
Предел допускаемой погрешности средств измерения – наибольшее значение погрешности средств измерений, устанавливаемое нормативно-техническим документом для данных типа средств измерений, при котором оно еще признается годным к применению.
Относительная и приведенная погрешности имеют принципиальное отличие.
Например:
1й прибор – 1% относительной погрешности, 2й прибор – приведенной.
 Х1<ХК
Х1<ХК
Возьмем, например, точку (Х1; Y1). Имеем:
откуда очевидно, что δПРИВ. <δОТН в виду того, что Х1<ХК.
Нелинейность
При рассмотрении нелинейной характеристики следует различать нелинейность как требуемую функциональную зависимость от нелинейности как погрешности линеаризации.
 Статические характеристики физических реальных устройств, как правило, не бывают линейными. Но поскольку линейная характеристика измерительных преобразователей очень удобна, то применяют допущения и линеаризуют нелинейную характеристику, заменяя ее наиболее близкой линейной. В этом случае возникает погрешность линеаризации. Однако при получении более высокой точности учитывают и нелинейную часть. Чаще всего результирующей характеристикой датчика является прямая, реже – нелинейная.
Статические характеристики физических реальных устройств, как правило, не бывают линейными. Но поскольку линейная характеристика измерительных преобразователей очень удобна, то применяют допущения и линеаризуют нелинейную характеристику, заменяя ее наиболее близкой линейной. В этом случае возникает погрешность линеаризации. Однако при получении более высокой точности учитывают и нелинейную часть. Чаще всего результирующей характеристикой датчика является прямая, реже – нелинейная.
 Многие датчики обладают свойством нелинейности. Например, если датчик достигает верхнего предела рабочего диапазона, проявляется эффект насыщения, т.е. выходной сигнал ограничен, даже если входная величина возрастает. Примеры нелинейностей:
Многие датчики обладают свойством нелинейности. Например, если датчик достигает верхнего предела рабочего диапазона, проявляется эффект насыщения, т.е. выходной сигнал ограничен, даже если входная величина возрастает. Примеры нелинейностей:
o нелинейная деформация пружин;
o кулоновское трение;
o магнитное насыщение в сердечниках трансформаторов;
o характеристики расходомеров;
o зависимость сопротивления термистора от температуры (R = R0 ехр(β(1/Т-1/Т0),где Т— это температура в градусах Кельвина, a R0, Т0 и Р — это постоянные).
Особые проблемы связаны с люфтом в зубчатых передачах и других механизмах, имеющих свободный ход, а также с магнитным насыщением. Выходной сигнал датчиков, для которых характерны такие явления, - это многозначная функция входной величины, зависящая от направления ее изменения.
Дата добавления: 2016-05-05; просмотров: 2036;