Применение LPT-порта
Обычно LPT-порт используют для подключения принтера (см. п. 8.3.1), однако этим его применение не исчерпывается.
Для связи двух компьютеров по параллельному интерфейсу применяются различные кабели в зависимости от режимов используемых портов. Самый простой и медленный — полубайтный режим, работающий на всех портах. Для этого режима в кабеле достаточно иметь 10 сигнальных и один общий провод. Распайка разъемов кабеля приведена в табл. 1.11. Связь двух PC данным кабелем поддерживается стандартным ПО типа Interlnk из MS-DOS или Norton Commander.
Высокоскоростная связь двух компьютеров может выполняться и в режиме ЕСР (режим ЕРР неудобен, поскольку требует синхронизации шинных циклов ввода-вывода двух компьютеров).
Подключение сканера к LPT-порту эффективно, только если порт обеспечивает хотя бы двунаправленный режим (Bi-Di), поскольку основной поток — ввод. Лучше использовать порт ЕСР, если этот режим поддерживается сканером (или ЕРР, что маловероятно).
Подключение внешних накопителей (Iomega Zip Drive, CD-ROM и др.), адаптеров ЛВС и других симметричных устройств ввода-вывода имеет свою специфику. В режиме SPP наряду с замедлением работы устройства заметна принципиальная асимметрия этого режима: чтение данных происходит в два раза медленнее, чем (весьма небыстрая) запись. Применение двунаправленного режима (Bi-Di или PS/2 Туре 1) устранит эту асимметрию — скорости сравняются. Только перейдя на ЕРР или ЕСР, можно получить нормальную скорость работы. В режиме ЕРР или ЕСР подключение к LPT-порту почти не уступает по скорости подключению через ISA-контроллер. Это справедливо и при подключении устройств со стандартным интерфейсом шин к LPT-портам через преобразователи интерфейсов (например, LPT - IDE, LPT - SCSI, LPT - PCMCIA). Заметим, что винчестер IDE, подключенный через адаптер к LPT-порту, для системы может быть представлен как устройство SCSI (это логичнее с программной точки зрения).
2. Последовательные интерфейсы
Последовательный интерфейс для передачи данных использует одну сигнальную линию, по которой информационные биты передаются друг за другом последовательно. Отсюда — название интерфейса и порта. Английские термины — Serial Interface и Serial Part (иногда их неправильно переводят как «серийные»). Последовательная передача позволяет сократить количество сигнальных линий и увеличить дальность связи. Характерной особенностью является применение не-ТТЛ сигналов. В ряде последовательных интерфейсов применяется гальваническая развязка внешних (обычно входных) сигналов от схемной земли устройства, что позволяет соединять устройства, находящиеся под разными потенциалами. Ниже будут рассмотрены интерфейсы RS-232C, RS-422А, RS-423A, RS-485, токовая петля, MIDI, а также СОМ-порт.
2.1. Способы последовательной передачи
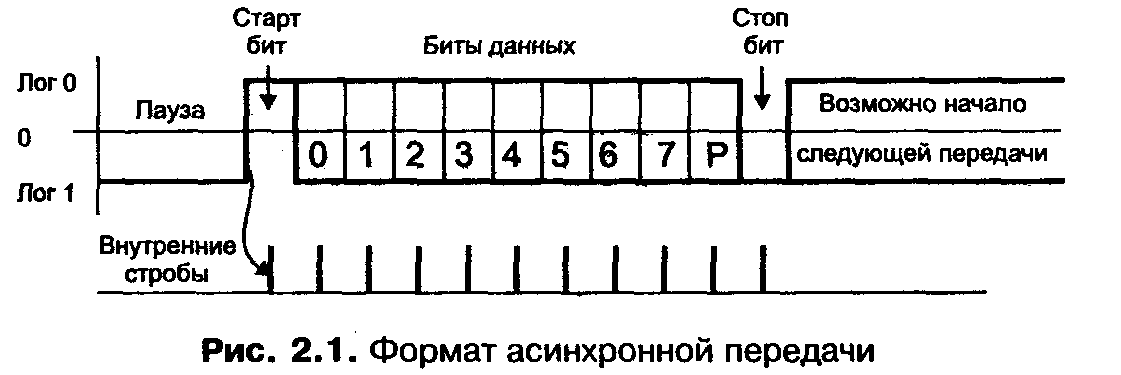
Последовательная передача данных может осуществляться в асинхронном или синхронном режимах. При асинхронной передаче каждому байту предшествует старт-бит, сигнализирующий приемнику о начале посылки, за которым следуют биты данных и, возможно, бит паритета (четности,). Завершает посылку стоп-бит, гарантирующий паузу между посылками (рис. 2.1). Старт-бит следующего байта посылается в любой момент после стоп-бита, то есть между передачами возможны паузы произвольной длительности. Старт-бит, имеющий всегда строго определенное значение (логический 0), обеспечивает простой механизм синхронизации приемника по сигналу от передатчика. Подразумевается, что приемник и передатчик работают на одной скорости обмена. Внутренний генератор синхронизации приемника использует счетчик-делитель опорной частоты, обнуляемый в момент приема начала старт-бита. Этот счетчик генерирует внутренние стробы, по которым приемник фиксирует последующие принимаемые
биты. В идеале стробы располагаются в середине битовых интервалов, что позволяет принимать данные и при незначительном рассогласовании скоростей приемника и передатчика. Очевидно, что при передаче 8 бит данных, одного контрольного и одного стоп-бита предельно допустимое рассогласование скоростей, при котором данные будут распознаны верно, не может превышать 5%. С учетом фазовых искажений и дискретности работы внутреннего счетчика синхронизации реально допустимо меньшее отклонение частот. Чем меньше коэффициент деления опорной частоты внутреннего генератора (чем выше частота передачи), тем больше погрешность привязки стробов к середине битового интервала, и требования к согласованности частот становятся более строгими. Чем выше частота передачи, тем больше влияние искажений фронтов на фазу принимаемого сигнала. Взаимодействие этих факторов приводит к повышению требований к согласованности частот приемника и передатчика с ростом частоты обмена.
Формат асинхронной посылки позволяет выявлять возможные ошибки передачи:
» Если принят перепад, сигнализирующий о начале посылки, а по стробу старт-бита зафиксирован уровень логической единицы, старт-бит считается ложным и приемник снова переходит в состояние ожидания. Об этой ошибке приемник может и не сообщать.
« Если во время, отведенное под стоп-бит, обнаружен уровень логического нуля, фиксируется ошибка стоп-бита.
'« Если применяется контроль четности, то после посылки бит данных передается контрольный бит. Этот бит дополняет количество единичных бит данных до четного или нечетного в зависимости от принятого соглашения. Прием байта с неверным значением контрольного бита приводит к фиксации ошибки.
Контроль формата позволяет обнаруживать обрыв линии:
при этом принимаются логический нуль, который сначала трактуется как старт-бит, и нулевые биты данных, потом срабатывает контроль стоп-бита.
Для асинхронного режима принят ряд стандартных скоростей обмена: 50, 75, 110, 150,300,600,1200,2400,4800,9600, 19 200, 38 400, 57 600 и 115 200 бит/с. Иногда вместо единицы измерения «бит/с» используют «бод» (baud), но при рассмотрении двоичных передаваемых сигналов это некорректно. В бодах принято измерять частоту изменения состояния линии, а при недвоичном способе кодирования (широко применяемом в современных модемах) в канале связи скорости передачи бит (бит/с) и изменения сигнала (бод) могут отличаться в несколько раз (подробнее см. в приложении А).
Количество бит данных может составлять 5, 6, 7 или 8 (5- и 6-битные форматы распространены незначительно). Количество стоп-бит может быть 1, 1,5 или 2 («полтора бита» означает только длительность стопового интервала).
Асинхронный обмен в PC реализуется с помощью СОМ-порта с использованием протокола RS-232C.
Синхронный режим передачи предполагает постоянную активность канала связи. Посылка начинается с синхробайта, за которым сразу же следует поток информационных бит. Если у передатчика нет данных для передачи, он заполняет паузу непрерывной посылкой байтов синхронизации. Очевидно, что при передаче больших массивов данных накладные расходы на синхронизацию в данном режиме будут ниже, чем в асинхронном. Однако в синхронном режиме необходима внешняя синхронизация приемника с передатчиком, поскольку даже малое отклонение частот приведет к искажению принимаемых данных. Внешняя синхронизация возможна либо с помощью отдельной линии для передачи сигнала синхронизации, либо с использованием самосинхронизирующего кодирования данных, при котором на стороне приемника из принятого сигнала могут быть выделены импульсы синхронизации. В любом случае синхронный режим требует дорогих линий связи или оконечного оборудования. Для PC существуют специальные платы — адаптеры SDLC (дорогие), поддерживающие синхронный режим обмена. Они используются в основном для связи с большими машинами (mainframes) IBM и мало распространены. Из синхронных адаптеров в настоящее время применяются адаптеры интерфейса V.35.
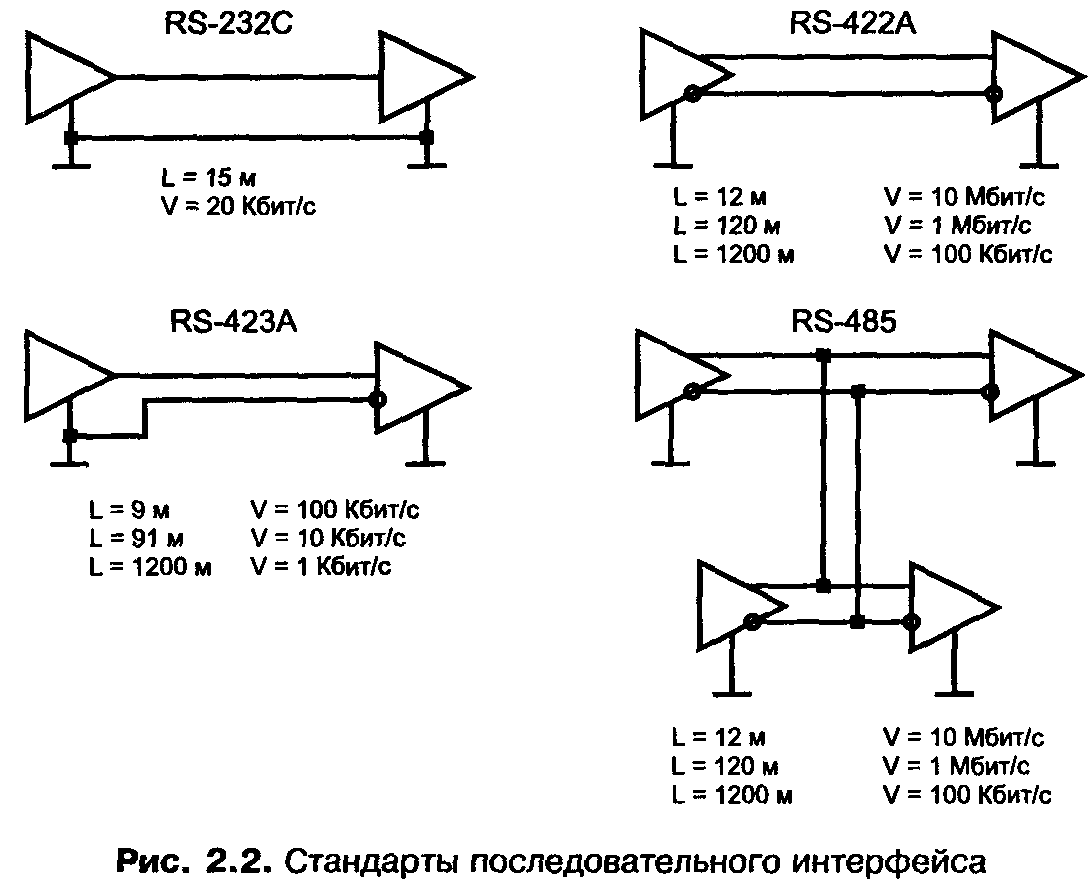
На физическом уровне последовательный интерфейс имеет различные реализации, различающиеся способом передачи электрических сигналов. Существует ряд родственных международных стандартов: RS-232C, RS-423A, RS-422A и RS-485. На рис. 2.2 приведены схемы соединения приемников и передатчиков, а также показаны ограничения на длину линии (L) и максимальную скорость передачи данных (V).
Несимметричные линии интерфейсов RS-232C и RS-423A имеют самую низкую защищенность от синфазной помехи, хотя дифференциальный вход приемника RS-423A несколько смягчает ситуацию. Лучшие параметры имеет двухточечный интерфейс RS-422A и его магистральный (шинный) аналог RS-485, работающие на симметричных линиях связи. В них для передачи каждого сигнала используются дифференциальные сигналы с отдельной (витой) парой проводов.
В перечисленных стандартах сигнал представляется потенциалом. Существуют последовательные интерфейсы, где информативен ток, протекающий по общей цепи передатчик-приемник — «токовая петля» и MIDI. Для связи на короткие расстояния приняты стандарты беспроводной инфракрасной связи. Наибольшее распространение в PC получил простейший из перечисленных — стандарт RS-232C, реализуемый СОМ-портами. В промышленной автоматике широко применяется RS-485, а также RS-422A, встречающийся и в некоторых принтерах. Существуют преобразователи сигналов для согласования этих родственных интерфейсов.
2.2. Интерфейс RS-232C
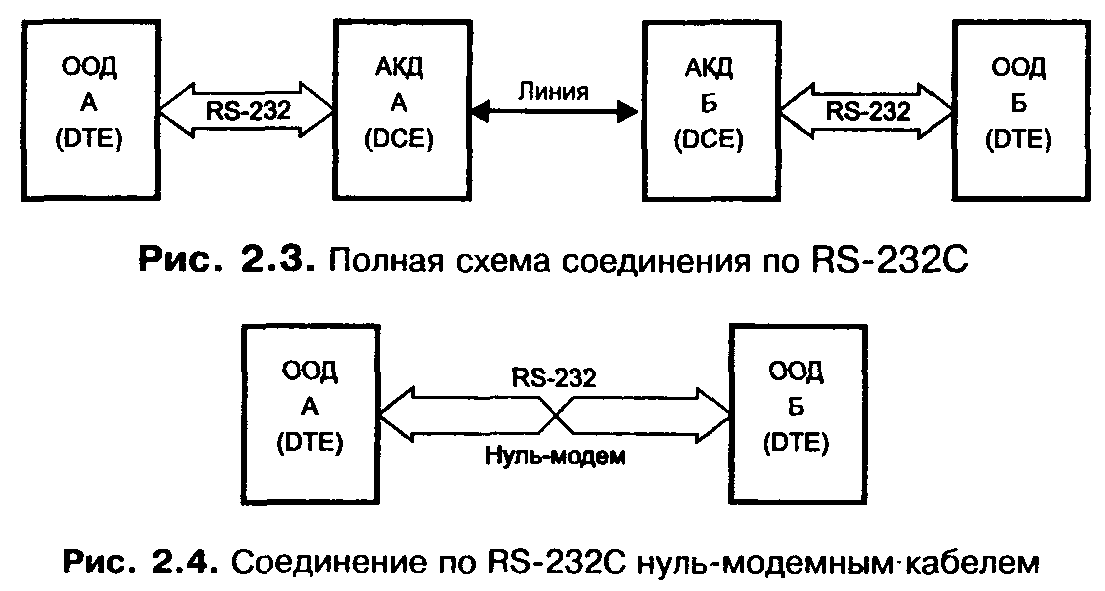
Интерфейс предназначен для подключения аппаратуры, передающей или принимающей данные (ООД — оконечное оборудование данных или АПД — аппаратура передачи данных; DTE — Data Terminal Equipment), к оконечной аппаратуре каналов данных (АКД; DCE — Data Communication Equipment). В роли АПД может выступать компьютер, принтер, плоттер и другое периферийное оборудование. В роли АКД обычно выступает модем. Конечной целью подключения является соединение двух устройств АПД. Полная схема соединения приведена на рис. 2.3. Интерфейс позволяет исключить канал удаленной связи вместе с парой устройств АПД, соединив устройства непосредственно с помощью нуль-модемного кабеля (рис. 2.4).
Стандарт описывает управляющие сигналы интерфейса, пересылку данных, электрический интерфейс и типы разъемов. В стандарте предусмотрены асинхронный и синхронный режимы обмена, но СОМ-порты поддерживают только асинхронный режим. Функционально RS-232C эквивалентен стандарту МККТТ V.24/ V.28 и стыку С2, но они имеют различные названия сигналов.
2.2.1. Электрический интерфейс
Стандарт RS-232C использует несимметричные передатчики и приемники — сигнал передается относительно общего провода — схемной земли (симметричные дифференциальные сигналы используются в других интерфейсах — например, RS-422). Интерфейс НЕ ОБЕСПЕЧИВАЕТ ГАЛЬВАНИЧЕСКОЙ РАЗВЯЗКИ устройств. Логической единице соответствует напряжение на входе приемника в диапазоне -12...-3 В. Для линий управляющих сигналов это состояние называется ON («включено»), для линий последовательных данных — MARK. Логическому нулю соответствует диапазон +3...+12 В. Для линий управляющих сигналов состояние называется OFF («выключено»), а для линий последовательных данных — SPACE. Диапазон -3...+3 В — зона нечувствительности, обусловливающая гистерезис приемника: состояние линии будет считаться измененным только после пересечения порога (рис. 2.5). Уровни сигналов на выходах передатчиков должны быть в диапазонах -12...-5 В и +5...+12 В для представления единицы и нуля соответственно. Разность потенциалов между схемными землями (SG) соединяемых устройств должна быть менее 2 В, при более высокой разности потенциалов возможно неверное восприятие сигналов. Интерфейс предполагает наличие ЗАЩИТНОГО ЗАЗЕМЛЕНИЯ для соединяемых устройств, если они оба питаются от сети переменного тока и имеют сетевые фильтры.
Подключение и отключение интерфейсных кабелей устройств с автономным питанием должно производиться при отключенном питании. Иначе разность невыровненных потенциалов устройств в момент коммутации может оказаться приложенной к выходным или входным (что опаснее) цепям интерфейса и вывести из строя микросхемы.

Для интерфейса RS-232C специально выпускаются буферные микросхемы приемников (с гистерезисом и передатчиком двуполярного сигнала). При несоблюдении правил заземления и коммутации они обычно являются первыми жертвами «пиротехнических» эффектов. Иногда их устанавливают в «кроватках», что облегчает замену. Цоколевка микросхем формирователей сигналов RS-232C приведена на рис. 2.6. Часто буферные схемы входят прямо в состав интерфейсных БИС. Это удешевляет изделие, экономит место на плате, но в случае аварии оборачивается крупными финансовыми потерями. Вывести из строя интерфейсные микросхемы замыканием сигнальных цепей маловероятно: ток короткого замыкания передатчиков обычно не превосходит 20 мА. 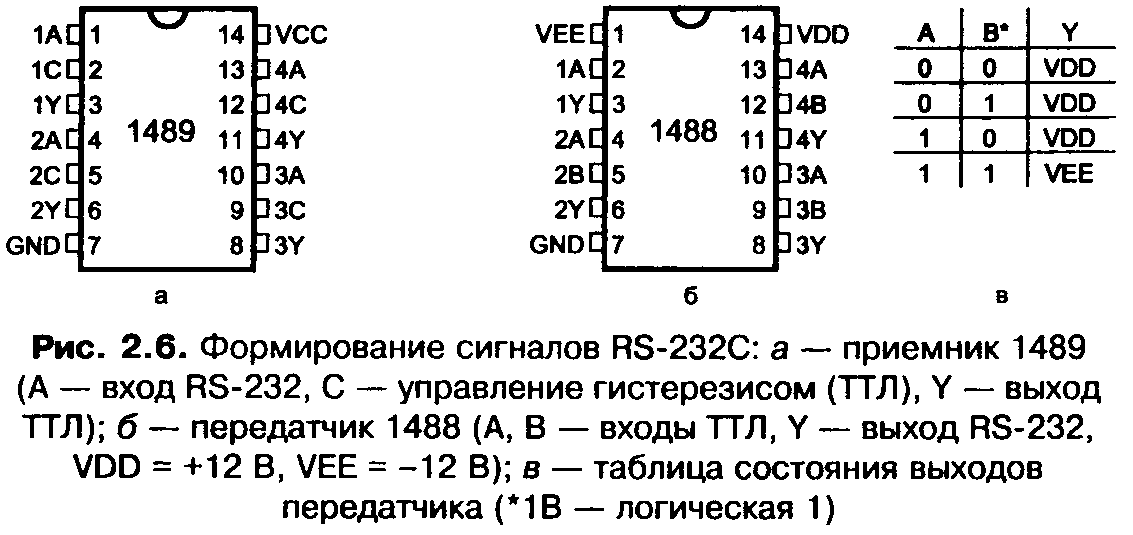
Стандарт RS-232C регламентирует типы применяемых разъемов.
На аппаратуре АПД (в том числе на СОМ-портах) принято устанавливать вилки (male — «папа») DB-25P или более компактный вариант — DB-9P. Девятиштырьковые разъемы не имеют контактов для дополнительных сигналов, необходимых для синхронного режима (в большинстве 25-штырько-вых разъемов эти контакты не используются).
На аппаратуре АКД (модемах) устанавливают розетки (female — «мама») DB-25Swm DB-9S.
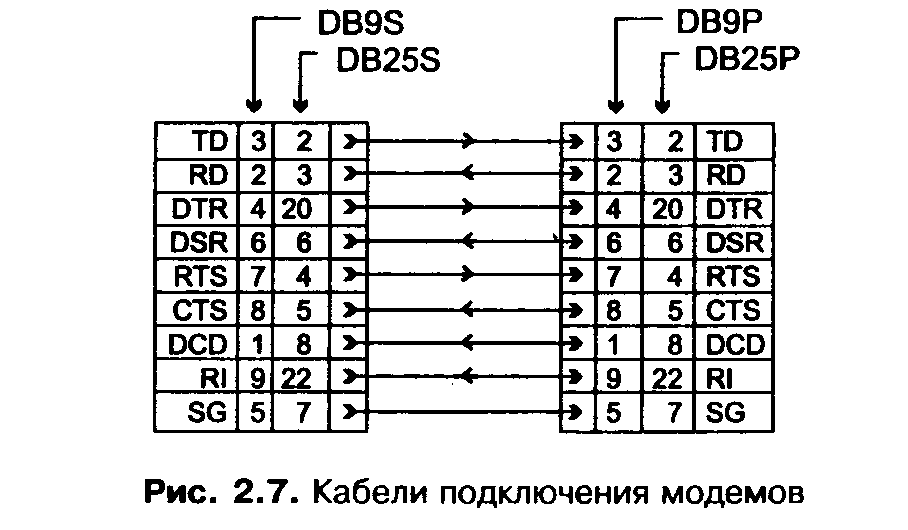
Это правило предполагает, что разъемы АКД могут подключаться к разъемам АПД непосредственно или через переходные «прямые» кабели с розеткой и вилкой, у которых контакты соединены «один в один». Переходные кабели могут являться и переходниками с 9- на 25-штырьковые разъемы (рис. 2.7).
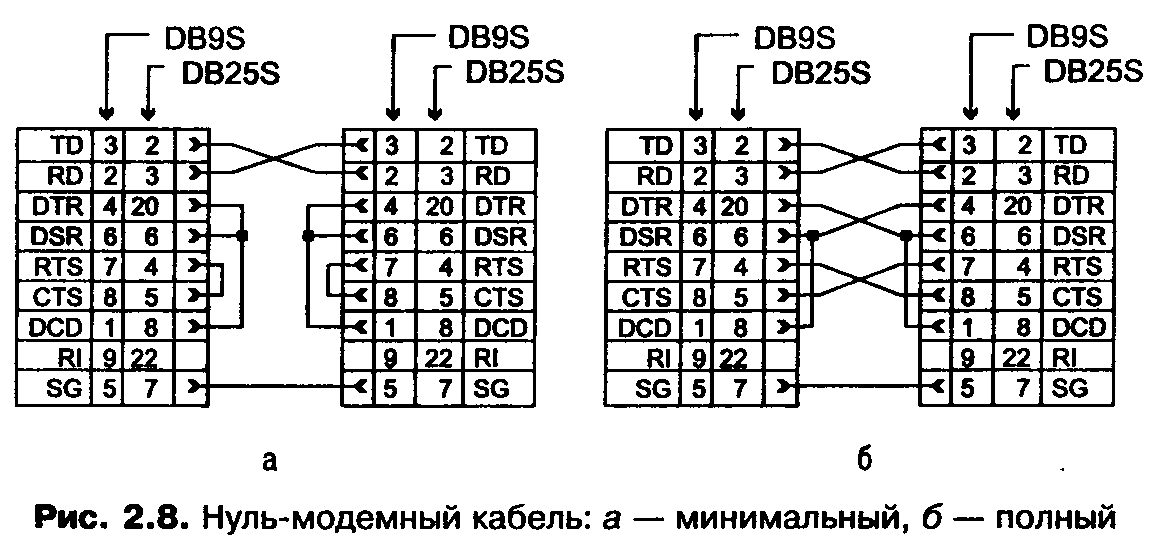
Если аппаратура АПД соединяется без модемов, то разъемы устройств (вилки) соединяются между собой нуль-модемным кабелем (Zero-modem или Z-modem), имеющим на обоих концах розетки, контакты которых соединяются перекрестно по одной из схем, приведенных на рис. 2.8.
Если на каком-либо устройстве АПД установлена розетка — это почти стопроцентный признак того, что к другому устройству оно должно подключаться прямым кабелем, аналогичным кабелю подключения модема. Розетка устанавливается обычно на тех устройствах, у которых удаленное подключение через модем не предусмотрено.
В табл. 2.1 приведено назначение контактов разъемов СОМ-портов (и любой другой аппаратуры АПД). Контакты разъема DB-25S определены стандартом EIA/TIA-232-E, разъем DB-9S описан стандартом EIA/ TIA-574. У модемов название цепей и контактов такое же, но роли сигналов (вход-выход) меняются на противоположные.
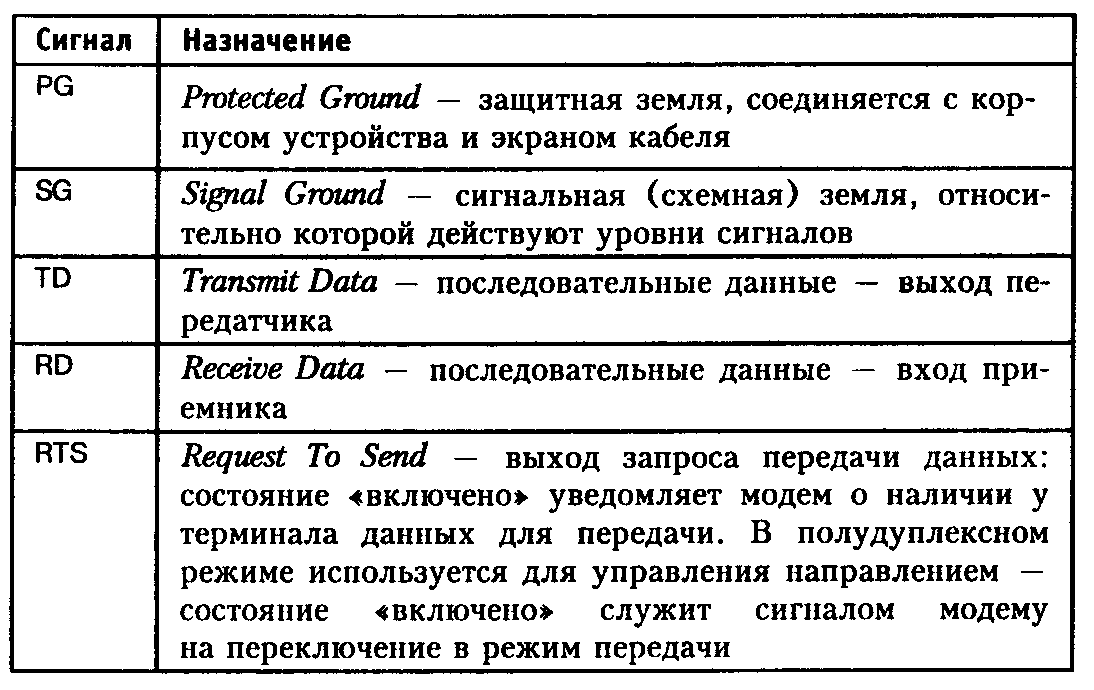
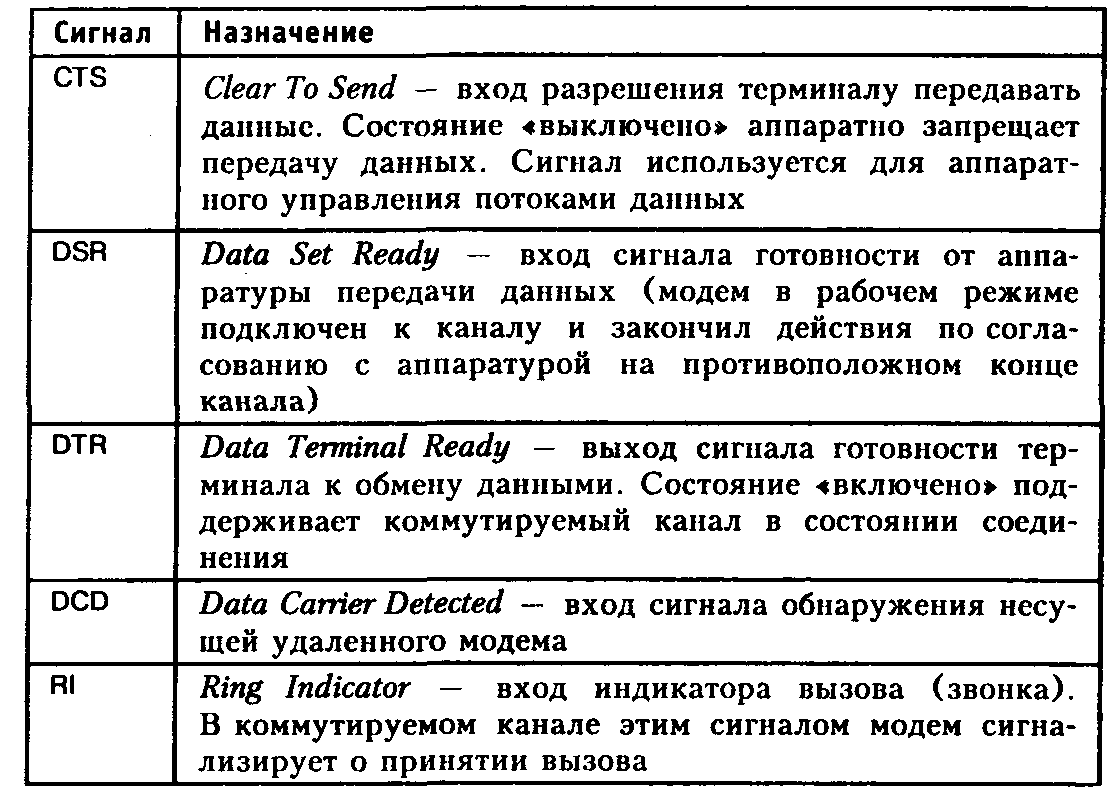
Подмножество сигналов RS-232C, относящихся к асинхронному режиму, рассмотрим с точки зрения СОМ-порта PC. Следует помнить, что активному состоянию сигнала («включено») и логической единице передаваемых данных соответствует отрицательный потенциал (ниже -3 В) сигнала интерфейса, а состоянию «выключено» и логическому нулю — положительный (выше +3 В). Назначение сигналов интерфейса приведено в табл. 2.2. 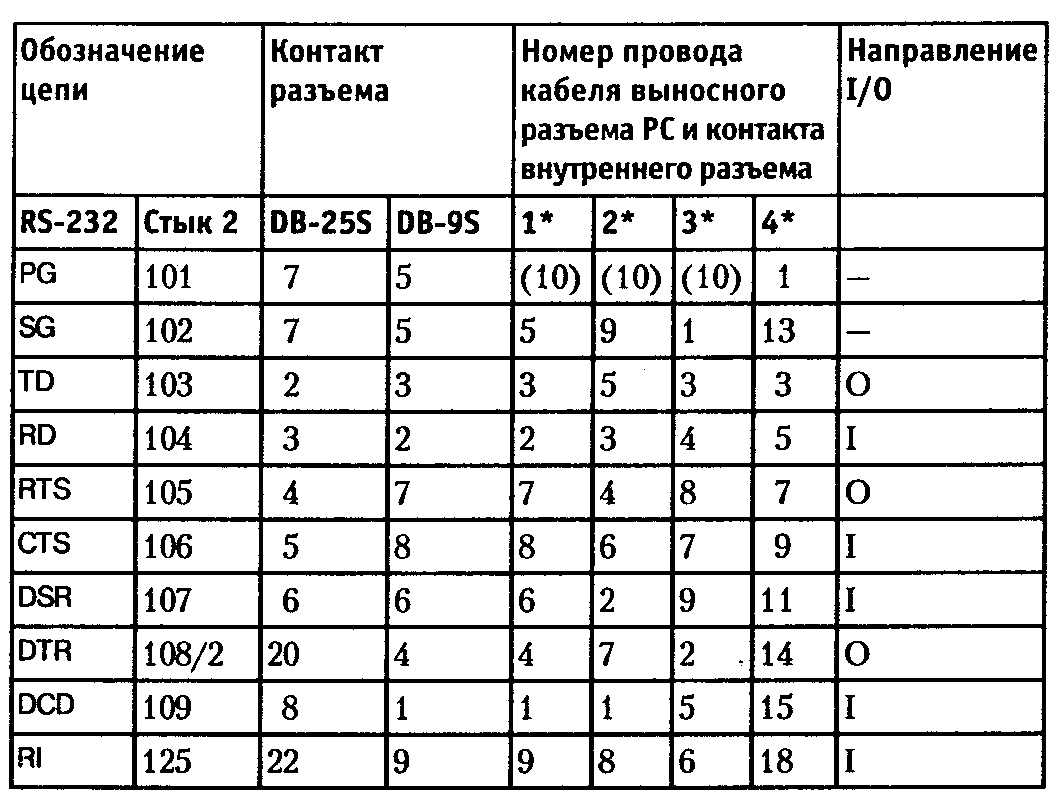
1*— шлейф 8-битных мультикарт.
2*— шлейф 16-битных мультикарт и портов на системных платах. 3*— вариант шлейфа портов на системных платах. 4*— широкий шлейф к 25-контактному разъему.
2.2.2. Управление потоком данных
Для управления потоком данных (Flow Control) могут использоваться два варианта протокола — аппаратный и программный. Иногда управление потоком путают с квитированием, но это разные методы достижения одной цели — согласования темпа передачи и приема. Квитирование (Handshaking) подразумевает посылку уведомления о получении элемента, в то время как управление потокам предполагает посылку уведомления о невозможности последующего приема данных.
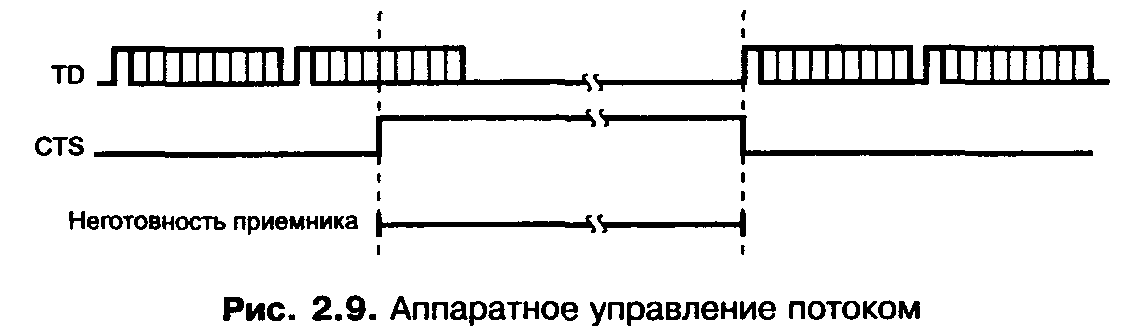
Аппаратный протокол управления потоком RTS/CTS (Hardware Flow Control) использует сигнал CTS, который позволяет остановить передачу данных, если приемник не готов к их приему (рис. 2.9). Передатчик «выпускает» очередной байт только при включенной линии CTS. Байт, который уже начал передаваться, задержать сигналом CTS невозможно (это гарантирует целостность посылки). Аппаратный протокол обеспечивает самую быструю реакцию передатчика на состояние приемника. Микросхемы асинхронных приемопередатчиков имеют не менее двух регистров в приемной части —
сдвигающий, для приема очередной посылки, и хранящий, из которого считывается принятый байт. Это позволяет реализовать обмен по аппаратному протоколу без потери данных.
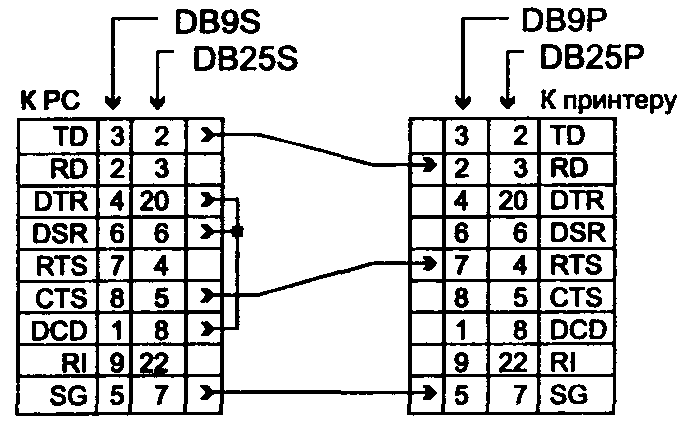
Аппаратный протокол удобно использовать при подключении принтеров и плоттеров, если они его поддерживают (рис. 2.10). При непосредственном (без модемов) соединении двух компьютеров аппаратный протокол требует перекрестного соединения линий RTS — CTS.
Если аппаратный протокол не используется, у передающего терминала должно быть обеспечено состояние «включено» на линии CTS перемычкой RTS — CTS. В противном случае передатчик будет «молчать».
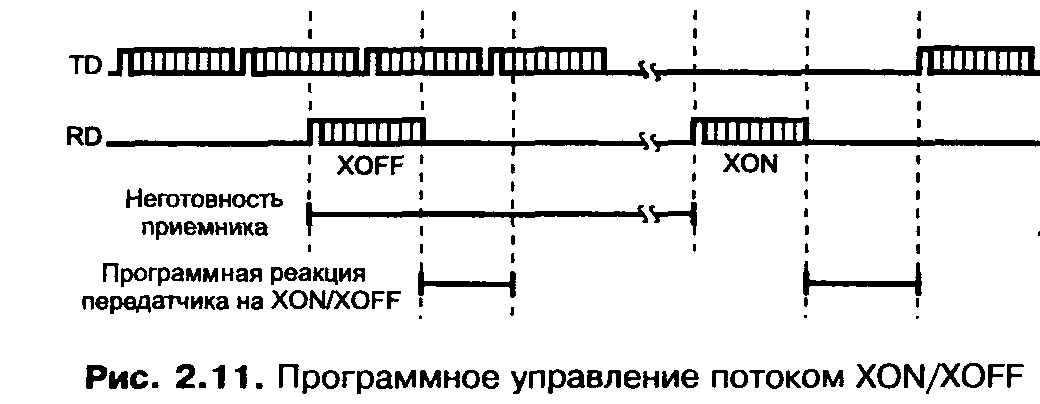
Программный протокол управления потоком XON/XOFF предполагает наличие двунаправленного канала передачи данных. Работает протокол следующим образом: если устройство, принимающее данные, обнаруживает причины, по которым не может их дальше принимать, оно по обратному последовательному каналу посылает байт-символ XOFF (13h). Противоположное устройство, приняв этот символ, приостанавливает передачу. Когда принимающее устройство снова становится готовым к приему данных, оно посылает символ
XON (llh), приняв который противоположное устройство возобновляет передачу. Время реакции передатчика на изменение состояния приемника по сравнению с аппаратным протоколом увеличивается по крайней мере на время передачи символа (XON или XOFF) плюс время реакции программы передатчика на прием символа (рис. 2.11). Из этого следует, что данные без потерь могут приниматься только приемником, имеющим дополнительный буфер принимаемых данных и сигнализирующим о неготовности заблаговременно (имея в буфере свободное место).
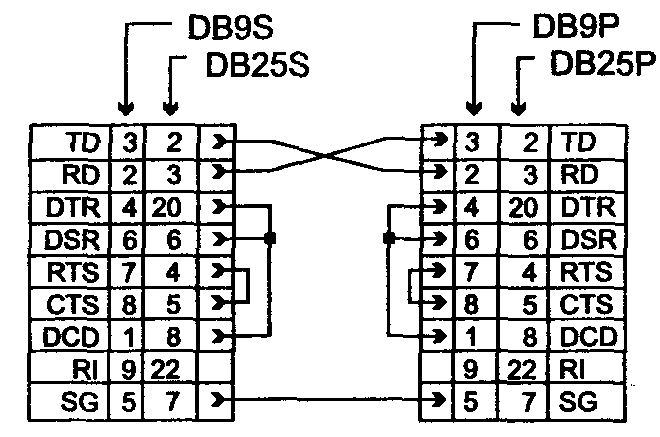
Преимущество программного протокола заключается в отсутствии необходимости передачи управляющих сигналов интерфейса — минимальный кабель для двустороннего обмена может иметь только 3 провода (см. рис. 2.8а). Недостатком, кроме требования наличия буфера и большего времени реакции (снижающего общую производительность канала из-за ожидания сигнала XON), является сложность реализации полнодуплексного режима обмена. В этом случае из потока принимаемых данных должны выделяться (и обрабатываться) символы управления потоком, что ограничивает набор передаваемых символов. Минимальный вариант кабеля для подключения принтера (плоттера) с протоколом XON/XOFF приведен на рис. 2.12.
Кроме этих двух распространенных стандартных протоколов, поддерживаемых и ПУ, и ОС, существуют и другие. Некоторые плоттеры с последовательным интерфейсом используют программное управление, но посылают не стандартные символы XON/XOFF, а слова (ASCII-строки). Такой обмен на уровне системной поддержки протокола практически не поддерживается (эти плоттеры непосредственно«разговаривают» с прикладной программой). Конечно, можно написать драйвер СОМ-порта (перехватчик INT 14h), но необходимость обработки в нем текстовых сообщений от устройства вывода обычно не вызывает восторга у системного программиста. Кабель для подключения совпадает с приведенным на рис. 2.12.
2.3. Интерфейс «токовая петля»
Распространенным вариантом последовательного интерфейса является токовая петля. В ней электрическим сигналом является не уровень напряжения относительно общего провода, а ток в двухпроводной линии, соединяющей приемник и передатчик. Логической единице (состоянию «включено») соответствует протекание тока 20 мА, а логическому нулю — отсутствие тока. Такое представление сигналов для описанного формата асинхронной посылки позволяет обнаружить обрыв линии — приемник заметит отсутствие стоп-бита (обрыв линии действует как постоянный логический нуль).
Токовая петля обычно предполагает гальваническую развязку входных цепей приемника от схемы устройства. При этом источником тока в петле является передатчик (этот вариант называют активным передатчиком). Возможно и питание от приемника (активный приемник), при этом выходной ключ передатчика может быть также гальванически развязан с остальной схемой передатчика. Существуют упрощенные варианты без гальванической развязки, но это уже вырожденный случай интерфейса. Токовая петля с гальванической развязкой позволяет передавать сигналы на расстояния до нескольких километров. Расстояние определяется сопротивлением пары проводов и уровнем помех. Поскольку интерфейс требует пары проводов для каждого сигнала, обычно используют только два сигнала интерфейса. В случае двунаправленного обмена применяются только сигналы передаваемых и принимаемых данных, а для управления потоком используется программный метод XON/XOFF. Если двунаправленный обмен не требуется, используют одну линию данных, а для управления потоком обратная линия задействуется для сигнала CTS (аппаратный протокол) или встречной линии данных (программный протокол).
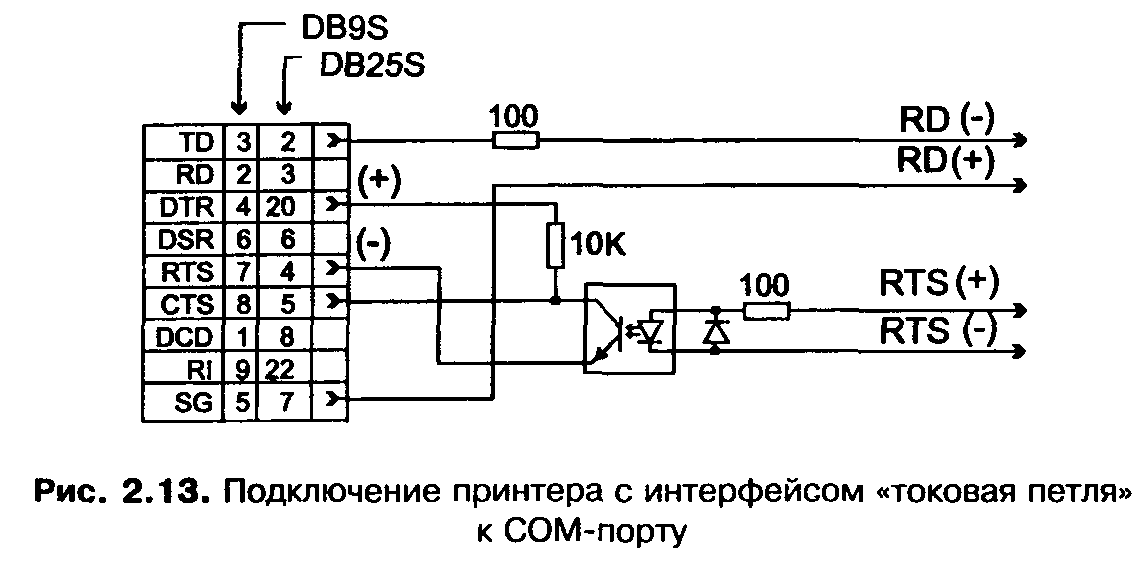
Преобразовать сигналы RS-232C в токовую петлю можно с помощью несложной схемы (рис. 2.13). Здесь принтер подключается по токовой петле к СОМ-порту с аппаратным управлением потоком. Для получения двуполярного сигнала, требуемого для входных сигналов СОМ-порта, применяется питание от интерфейса.
При надлежащем ПО одной токовой петлей можно обеспечить двунаправленную полудуплексную связь двух устройств. При этом каждый приемник «слышит» как сигналы передатчика на противоположной стороне канала, так и сигналы своего передатчика. Они расцениваются коммуникационными пакетами просто как эхо-сигнал. Для безошибочного приема передатчики должны работать поочередно.
2.4. Интерфейс MIDI
Цифровой интерфейс музыкальных инструментов MIDI (Musical Instrument Digital Interface) является двунаправленным последовательным асинхронным интерфейсом с частотой передачи 31,25 Кбит/с. Этот интерфейс, разработанный в 1983 году, стал фактическим стандартом для сопряжения компьютеров, синтезаторов, записывающих и воспроизводящих устройств, микшеров, устройств специальных эффектов и другой электромузыкальной техники.
В интерфейсе применяется таковая петля 10 мА (возможно 5 мА) с гальванической развязкой входной цепи. Это исключает связь «схемных земель» соединяемых устройств через интерфейсный кабель, устраняя помехи, крайне нежелательные для звуковой техники. Снижению интерференционных помех служит и выбор частоты передачи, которая совпадает с одним из значений частот квантования, принятых в цифровой звукозаписи.
Асинхронная посылка содержит старт-бит, 8 бит информации и 1 стоп-бит, контроль четности отсутствует. Старший бит посылки является признаком «команда/данные». Его нулевое значение указывает на наличие семи бит данных в младших разрядах. При единичном значении биты [6:4] содержат код команды, а биты [3:0] — номер канала. Команды могут быть как адресованными конкретному каналу, так и широковещательными безадресными. К последней группе относятся команды старта, стопа и отметки времени, обеспечивающие синхронизацию устройств (система синхронизации MIDI Sync и МТС - MIDI Time Code).
Интерфейс определяет три типа портов: MIDI-In, MIDI-Out nMIDI-Thru.
Входной порт MIDI-In представляет собой вход интерфейса «токовая петля 10 мА», гальванически развязанного от приемника оптроном с быстродействием не хуже 2 мкс. Устройство отслеживает информационный поток на этом входе и реагирует на адресованные ему команды и данные.
Выходной порт MIDI-Out представляет собой выход источника тока 10 мА, гальванически связанного со схемой уст- ройства. Ограничительные резисторы предохраняют выходные цепи от повреждения при замыкании на землю или источник 5 В. На выход подается информационный поток от данного устройства. В потоке может содержаться и транслированный входной поток.
Транзитный порт MIDI-Thru (не обязателен) служит для ретрансляции входного сигнала.
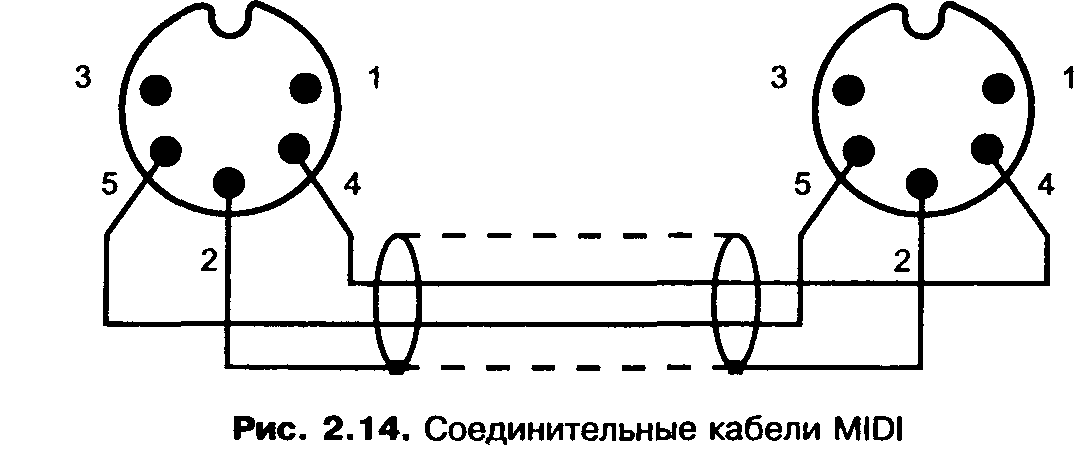
В качестве разъемов применяются 5-контактные разъемы DIN, распространенные в бытовой звуковой аппаратуре. На всех устройствах устанавливаются розетки, на кабелях — вилки. Все соединительные кабели MIDI унифицированы (рис. 2.14). Контакт 2 — экран кабеля — соединяется с общим проводом только на стороне передатчика (на разъемах MIDI-Out и MIDI-Thru).
В маркировке входов и выходов, указанной около разъемов, бывают разночтения. Одни производители пишут «In» или «Out» в соответствии с функцией разъема данного устройства (и это) правильно), тогда любой кабель соединяет «In» и «Out». Другие считают, что подпись должна обозначать функцию подключаемого устройства. Тогда кабель будет соединять разъемы с обозначениями «In» — «In» и «Out» — «Out».
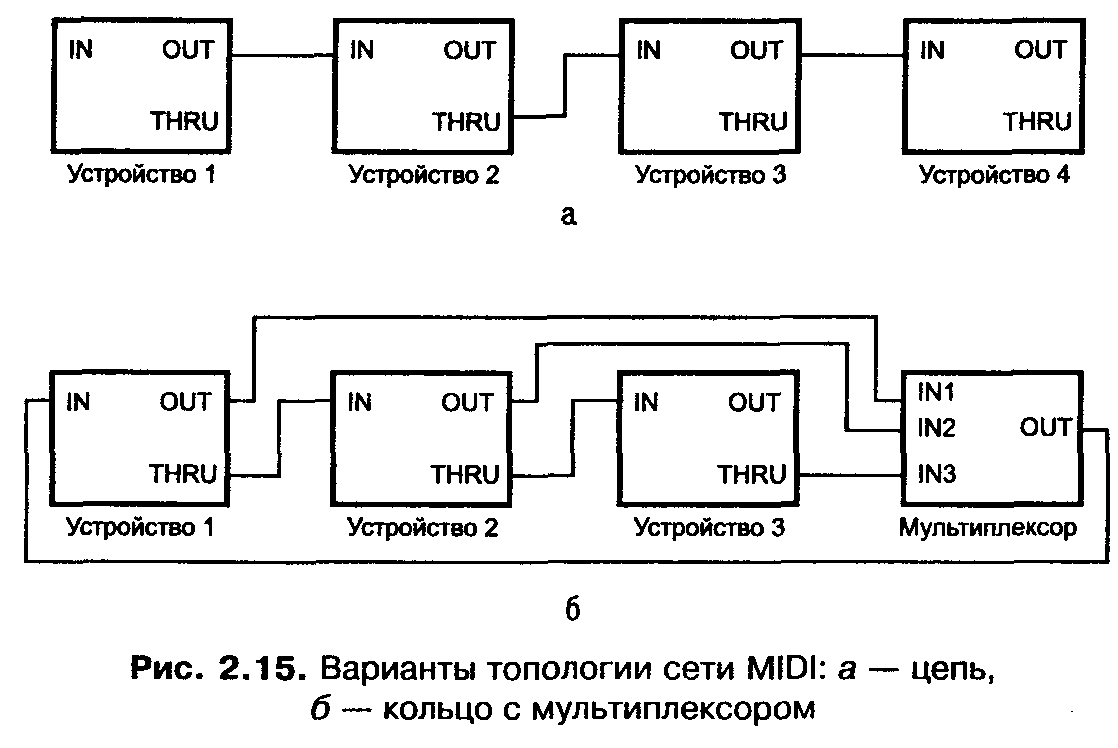
Интерфейс позволяет объединить группу до 16 устройств в локальную сеть. Топология должна подчиняться правилу:
вход MIDI-In одного устройства должен подключаться к выходу MIDI-Out или MIDI-Thru другого. При планировании MIDI-сети необходимо руководствоваться информационными потоками и связью устройств. Управляющие устройства — клавиатуры, секвенсоры (в режиме воспроиз- ведения), источники синхронизации — должны находиться перед управляемыми. Если устройства нуждаются в двунаправленном обмене, они соединяются в кольцо. Возможно применение специальных мультиплексоров, позволяющих логически коммутировать несколько входных потоков в один выходной. Вырожденным случаем кольца является двунаправленное соединение двух устройств. Несколько вариантов соединения приведено на рис. 2.15.
В PC MIDI-порт имеется на большинстве звуковых адаптеров, его сигналы выведены на неиспользуемые контакты (12 и 15) разъема игрового адаптера. Для подключения устройств MIDI требуется переходной адаптер, реализующий интерфейс «токовая петля». Переходной адаптер обычно встраивается в специальный кабель, схема которого приведена на рис. 2.16. Некоторые модели PC имеют встроенные адаптеры и стандартные 5-штырьковые разъемы MIDI.
В PC для интерфейса MIDI применяются порты, совместимые с контроллером MPU-401 (Roland) в режиме UART. В пространстве ввода/вывода MPU-401 занимает два смежных адреса MPU (обычно 330h) и MPU+1:
'» Порт DATA (адрес MPU+0) — запись и считывание байт, передаваемых и принимаемых по интерфейсу MIDI. Порт STATUS/COMMAND (адрес MPU+1) - чтение состояния / запись команд (запись — только для интеллектуального режима). В байте состояния определены следующие биты:
Бит 7 - DSR (Data Set Ready) - готовность (DSR-0) принятых данных для чтения. Бит устанавливается в «I», когда все принятые байты считаны из регистра данных.
Бит 6 - DRR (Data Read Ready) - готовность (DRR=0) UART к записи в регистр данных или команд. Условие готовности к записи не возникнет, если приемник имеет непрочитанный байт данных.

На некоторых системных платах применяются БИС контроллеров интерфейсов, в которых UART, используемая для СОМ-порта, конфигурированием через BIOS SETUP может быть переведена в режим MIDI-порта.
СОМ-порт
Последовательный интерфейс СОМ-порт (Communication Port — коммуникационный порт) появился в первых моделях IBM PC. Он был реализован на микросхеме асинхронного приемопередатчика Intel 8250. Порт имел поддержку BIOS (/Л/Т 74/?), однако широко применялось (и применяется) взаимодействие с портом на уровне регистров. Поэтому во всех PC-совместимых компьютерах для последовательного интерфейса применяют микросхемы приемопередатчиков, совместимые с i8250. В ряде отечественных PC-совместимых (почти) компьютеров для последовательного интерфейса применялась микросхема КР580ВВ51 — аналог i8251. Однако эта микросхема является универсальным синхронно-асинхронным приемопередатчиком (УСАПП или USART — Universal Asynchronous Receiver-Transmitter). Совместимости с PC на уровне регистров СОМ-порта такие компьютеры не имеют. Хорошо, если у соответствующих компьютеров имеется «честный» драйвер B/OS INT 14h, а не заглушка, возвращающая состояние модема «всегда готов» и ничего не делающая. Совместимость на уровне регистров СОМ-порта считается необходимой. Многие разработчики коммуникационных пакетов предлагают работу и через B/OS INT 14h, однако на высоких скоростях это неэффективно. Говоря о СОМ-порте PC, по умолчанию будем подразумевать совместимость регистровой модели с i8250 и реализацию асинхронного интерфейса RS-232C.
2.5.1. Использование СОМ-портов
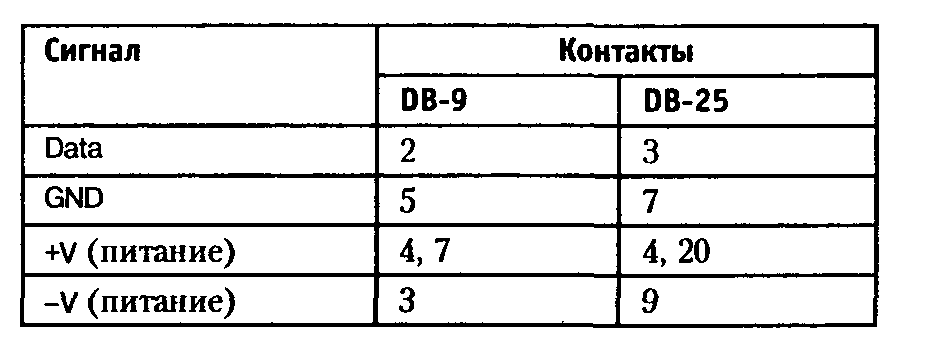
СОМ-порты чаще всего применяют дляподключения манипуляторов (мышь, трекбол). В этом случае порт используется в режиме последовательного ввода; питание производится от интерфейса. Мышь с последовательным интерфейсом — Serial Mouse —может подключаться к любому исправному порту. Для согласования разъемов порта и мыши возможно применение переходника DB-9S-DB-25P или DB-25S-DB-9P. Для мыши требуется прерывание, для порта СОМ 1 — IRQ4, для COM2 — IRQ3. Жесткая привязка номера IRQ к номеру порта обусловлена свойствами драйверов. Каждое событие — перемещение мыши или нажатие-отпускание кнопки — кодируется двоичной посылкой по интерфейсу RS-232C. Применяется асинхронная передача; двуполярное питание обеспечивается от управляющих линий интерфейса (табл. 2.3).
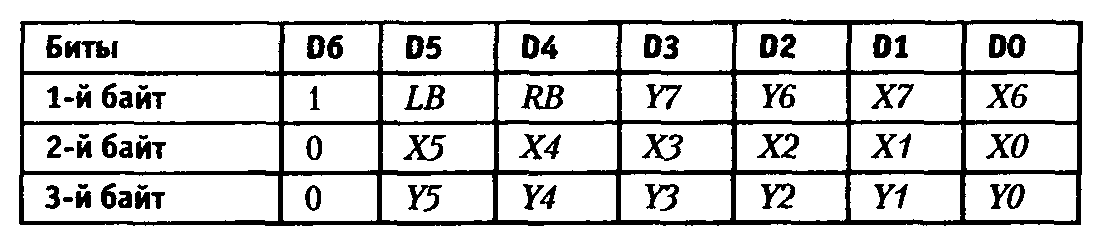
Две разновидности Serial Mouse — MS-Mouse и PC-Mouse (Mouse Systems Mouse) — требуют соответствующих драйверов, многие мыши имеют переключатель MS/PC. Мышь с «чужим» драйвером либо не отзывается, либо «скачет» загадочным образом. Эти разновидности используют различные форматы посылок: при одинаковой скорости 1200 бит/с, одном стоп-бите и отсутствии контроля четности Microsoft Mouse использует 7 бит данных, a PC-Mouse — 8 бит. Мышь посылает пакет при каждом изменении состояния — перемещении, нажатии или отпускании кнопки. Пакет, передаваемый MS-Mouse, состоит из трех байт (табл. 2.4). PC-Mouse передает 5 байт (табл. 2.5). Здесь LB (Left Buttom), MB (Middle Buttom) и RB (Right Buttom) означают состояние левой, средней и правой кнопок, Х[7:0] и Y[7:0] — биты относительного перемещения мыши с момента предыдущей посылки по координатам Х и Y. Положительным значениям соответствует перемещение по координате Х вправо, а по координате Y вниз для MS-Mouse и вверх для PC-Mouse. Отсюда становятся понятными беспорядочные перемещения курсора на экране при несоответствии драйвера типу мыши.

Дляподключения внешних модемов используется полный (9-проводный) кабель АПД-АКД, схема которого приведена на рис. 2.7. Этот же кабель используется для согласования разъемов (по количеству контактов); возможно применение переходников 9-25, предназначенных для мышей. Для работы коммуникационного ПО обычно требуется использование прерываний, но здесь есть свобода выбора номера (адреса) порта и линии прерывания. Если предполагается работа на скоростях 9600 бит/с и выше, то СОМ-порт должен быть реализован на микросхеме UART 16550A или совместимой. Возможности работы с использованием FIFO-буферов и обмена по каналам DMA зависят от коммуникационного ПО.
Длясвязи двух компьютеров, удаленных друг от друга на небольшое расстояние, используют и непосредственное соединение их СОМ-портов нуль-модемным кабелем (рис. 2.8). Использование программ типа Norton Commander или Interink MS-DOS позволяет обмениваться файлами со скоростью до 115,2 Кбит/с без применения аппаратных прерываний. Это же соединение может использоваться и сетевым пакетом Lantastic, предоставляющим более развитый сервис.
Подключение принтеров и плоттеров к СОМ-порту требует применения кабеля, соответствующего выбранному протоколу управления потоком: программному XON/XOFF или аппаратному RTS/CTS. Схемы кабелей приведены на рис. 2.10 и 2.12. Аппаратный протокол предпочтительнее. Прерывания при выводе средствами DOS (командами COPY или PRINT) не используются.
СОМ-порт используется дляподключения электронных ключей (Security Devices), предназначенных для защиты от нелицензированного использования ПО. Эти устройства могут быть как «прозрачными», позволяя воспользоваться тем же портом для подключения периферии, так и полностью занимающими порт.
СОМ-порт при наличии соответствующей программной поддержки позволяет превратить PC в терминал, эмулируя систему команд распространенных специализированных терминалов (VT-52, VT-100 и т. д.). Простейший терминал получается, если замкнуть друг на друга функции BIOS обслуживания СОМ-порта (INT 14h), телетайпного вывода (/Л/Т 10h) и клавиатурного ввода (INT 16h). Однако такой терминал будет работать лишь на малых скоростях обмена (если, конечно, его делать не на Pentium), поскольку функции BIOS хоть и универсальны, но не слишком быстры.
Интерфейс RS-232C широко распространен в различных ПУ и терминалах. СОМ-порт может использоваться и как двунаправленный интерфейс, у которого имеется 3 программно-управляемые выходные линии и 4 программно-читаемые входные линии с двуполярными сигналами. Их использование определяется разработчиком. Существует, например, схема однобитного широтно-импульсного преобразователя, позволяющего записывать звуковой сигнал на диск PC, используя входную линию СОМ-порта. Воспроизведение этой записи через обычный динамик PC позволяет передать речь. В настоящее время, когда звуковая карта стала почти обязательным устройством PC, это не впечатляет, но когда-то такое решение было интересным.
СОМ-порт используют длябеспроводных коммуникацийс применением излучателей и приемников инфракрасного диапазона — IR (Infra Red) Connection. Этот интерфейс позволяет осуществлять связь между парой устройств, удаленных на расстояние, достигающее нескольких метров. Различают инфракрасные системы низкой (до 115,2 Кбит/с), средней (1,152 Мбит/с) и высокой (4 Мбит/с) скорости. Низкоскоростные системы служат для обмена короткими сообщениями, высокоскоростные — для обмена файлами между компьютерами, подключения к компьютерной сети, вывода на принтер, проекционный аппарат и т. п. Ожидаются более высокие скорости обмена, которые позволят передавать «живое видео». В 1993 году создана ассоциация разработчиков систем инфракрасной передачи данных IrDA (Infrared Data Association), призванная обеспечить совместимость оборудования от различных производителей. В настоящее время действует стандарт IrDA 1.1. Имеются собственные системы фирм Hewlett Packard — HP-SIR (Hewlett Packard Slow Infra Red) - и Sharp - ASK (Amplitude Shifted Keyed IR). Основные характеристики интерфейсов следующие:
a IrDA SIR (Slow Infra Red), HP-SIR - 9,6-115,2 Кбит/с;
is IrDA MIR (Middle Infra Red) - 1,2 Мбит/с; » IrDA FIR (Fast Infra Red) - 4 Мбит/с;
ж Sharp ASK - 9,6-57,6 Кбит/с.
На скоростях до 115 200 бит/с для инфракрасной связи используются UART, совместимые с 16450/16550. В современных системных платах на использование инфракрасной связи может конфигурироваться порт COM2. В этом случае на переднюю панель компьютера устанавливается внешний приемопередатчик — «инфракрасный глаз», который подключается к разъему IR-Connector системной платы.
На средних и высоких скоростях обмена применяются специализированные микросхемы, ориентированные на интенсивный программно-управляемый обмен или DMA с возможностью прямого управления шиной.
Инфракрасные излучатели не создают помех в радиочастотном диапазоне и обеспечивают конфиденциальность передачи. ИК-лучи не проходят через стены, поэтому зона приема ограничивается небольшим легко контролируемым пространством. Инфракрасная технология привлекательна для связи портативных компьютеров со стационарными компьютерами или док-станциями. Инфракрасный интерфейс имеют некоторые модели принтеров.
2.5.2. Микросхемы асинхронных приемопередатчиков
Преобразование параллельного кода в последовательный для передачи и обратное преобразование при приеме данных выполняют специализированные микросхемы UART (Universal Asynchronous Receiver-Transmitter — универсальный асинхронный приемопередатчик). Эти же микросхемы формируют и обрабатывают управляющие сигналы интерфейса. СОМ-пор-ты IBM PC XT/AT базируются на микросхемах, совместимых на уровне регистров с UART i8250 - 8250/16450/16550А Это семейство представляет собой усовершенствование начальной модели, направленное на повышение быстродействия, снижение потребляемой мощности и загрузки процессора при интенсивном обмене. Отметим следующее:
« 8250 имеет ошибки (появление ложных прерываний), учтенные в XT BIOS. » 8250А — ошибки исправлены, в результате чего потеряна совместимость с BIOS. Работает в некоторых моделях AT, но непригоден для скорости 9600 бит/с.
ж 8250В — исправлены ошибки 8250 и 8250А, восстановлена ошибка в прерываниях — возвращена совместимость с XT BIOS. Работает в AT под DOS (кроме скорости 9600 бит/с).
Микросхемы 8250х имеют невысокое быстродействие по обращениям со стороны системной шины. Они не допускают обращения к своим регистрам в смежных шинных циклах процессора — для корректной работы с ними требуется введение программных задержек между обращениями CPU.
В компьютерах класса AT применяют микросхемы UART следующих модификаций:
а 16450 — быстродействующая версия 8250 для AT. Ошибок 8250 и полной совместимости с XT BIOS не имеет. Требуется для работы OS/2 с СОМ-портами.
ж 16550 — развитие 16450. Может использовать канал DMA для обмена данными. Имеет FIFO-буфер, но некорректность его работы не позволяет им воспользоваться.
я 16550А — имеет работающие 16-байтные FIFO-буферы приема и передачи и возможность использования DMA. Именно этот тип UART должен применяться в AT при интенсивных обменах на скоростях 9600 бит/с и выше. Совместимость с этой микросхемой обеспечивает большинство микросхем контроллеров портов ввода/вывода, входящих в современные чипсеты.
Микросхемы UART 16550А с программной точки зрения представляют собой набор регистров, доступ к которым определяется адресом (смещением адреса регистра относительно базового адреса порта) и значением бита DLAB (бита 7 регистра LCR). В адресном пространстве микросхема занимает 8 смежных адресов. Список регистров UART 16550А и способы доступа к ним приведены в табл. 2.6. Микросхемы 8250 отличаются отсутствием регистра FCR и всех возможностей FIFO и DMA. 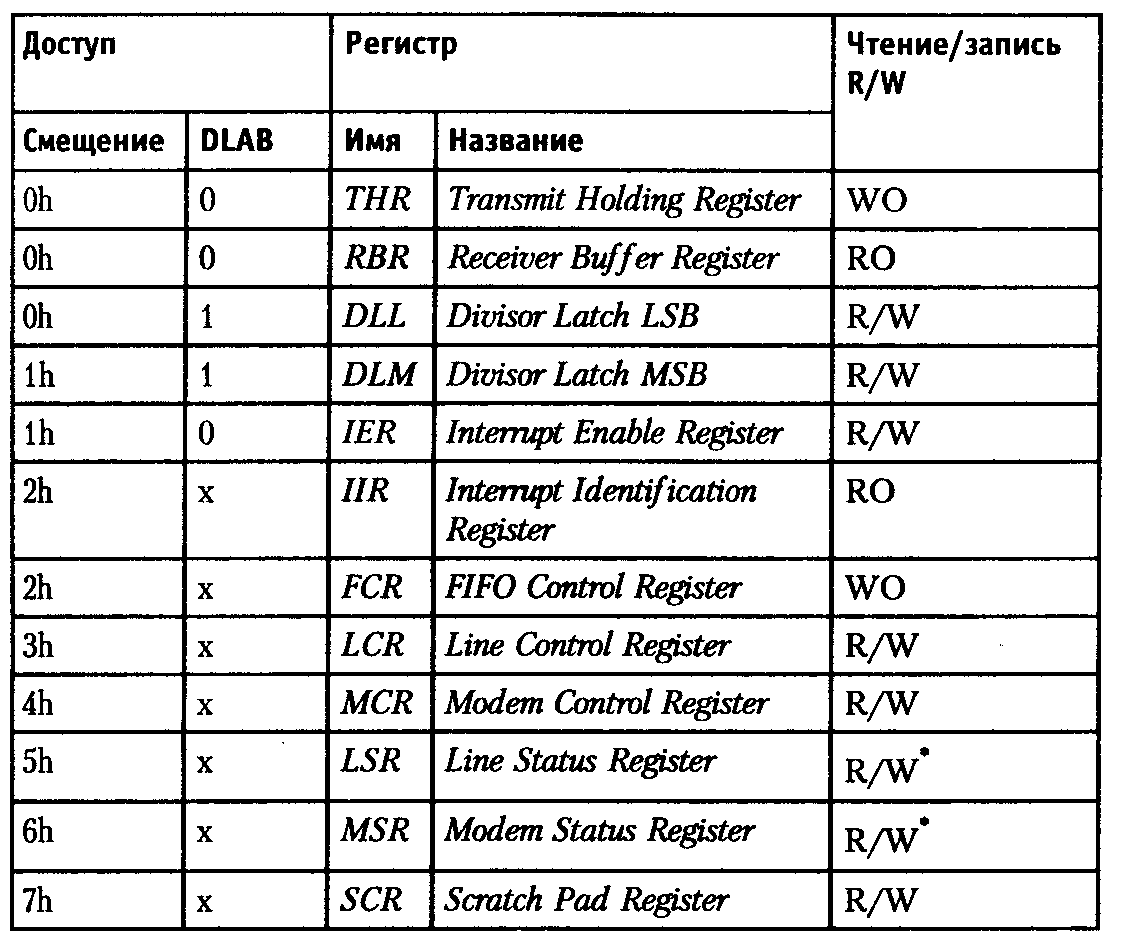
* Некоторые биты допускают только чтение. Запись в регистр может привести к сбою протокола.
THR — промежуточный регистр данных передатчика (только для записи). Данные, записанные в регистр, будут пересланы в выходной сдвигающий регистр (когда он будет свободен), из которого поступят на выход при наличии разрешающего сигнала CTS. Бит 0 передается (и принимается) первым. При длине посылки менее 8 бит старшие биты игнорируются.
RBR — буферный регистр принимаемых данных (только для чтения). Данные, принятые входным сдвигающим регистром, помещаются в регистр RBR, откуда они могут быть считаны процессором. Если к моменту окончания приема очередного символа предыдущий не был считан из регистра, фиксируется ошибка переполнения. При длине посылки менее 8 бит старшие биты в регистре имеют нулевое значение.
DLL — регистр младшего байта делителя частоты.
DLM — регистр старшего байта делителя частоты. Делитель
определяется по формуле D=115200/V, где V — скорость пе- редачи, бит/с. Входная частота синхронизации 1,8432 МГц делится на заданный коэффициент, после чего получается 16-кратная частота передачи данных.
IER — регистр разрешения прерываний. Единичное значение бита разрешает прерывание от соответствующего источника.
Дата добавления: 2016-06-13; просмотров: 2877;