Критическая секция. Блокирующие переменные. Семафоры. Тупики
Важным понятием синхронизации потоков является понятие «критической секции» программы. Критическая секция — это часть программы, результат выполнения которой может непредсказуемо меняться, если переменные, относящиеся к .этой части программы, изменяются другими потоками в то время, когда выполнение этой части еще не завершено. Критическая секция всегда определяется по отношению к определенным критическим данным, при несогласованном изменении которых могут возникнуть нежелательные эффекты. В предыдущем примере такими критическими данными являлись записи файла базы данных. Во всех потоках, работающих с критическими данными, должна быть определена критическая секция. Заметим, что в разных потоках критическая секция состоит в общем случае из разных последовательностей команд.
Чтобы исключить эффект гонок по отношению к критическим данным, необходимо обеспечить, чтобы в каждый момент времени в критической секции, связанной с этими данными, находился только один поток. При этом неважно, находится этот поток в активном или в приостановленном состоянии. Этот прием называют взаимным исключением. Операционная система использует разные способы реализации взаимного исключения. Некоторые способы пригодны для взаимного исключения при вхождении в критическую секцию только потоков одного процесса, в то время как другие могут обеспечить взаимное исключение и для потоков разных процессов.
Самый простой и в то же время самый неэффективный способ обеспечения Взаимного исключения состоит в том, что операционная система позволяет потоку запрещать любые прерывания на время его нахождения в критической секции. Однако этот способ практически не применяется, так как опасно доверять управление системой пользовательскому потоку — он может надолго занять процессор, а при крахе потока в критической секции крах потерпит вся система, потому что прерывания никогда не будут разрешены.
Для синхронизации потоков одного процесса прикладной программист может использовать глобальные блокирующие переменные. С этими переменными, к которым все потоки процесса имеют прямой доступ, программист работает, не обращаясь к системным вызовам ОС.
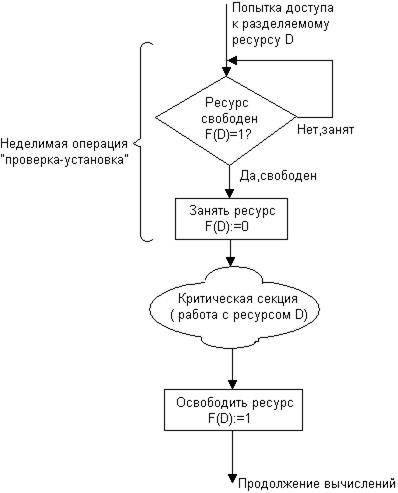
Рис. 4.4.Реализация критических секций с использованием блокирующие переменных
Каждому набору критических данных ставится в соответствие двоичная переменная, которой поток присваивает значение 0, когда он входит в критическую секцию, и значение 1, когда он ее покидает. На рис. 4.4. показан фрагмент алгоритма потока, использующего для реализации взаимного исключения доступа к критическим данным 0 блокирующую переменную F(D). Перед входом в критическую секцию поток проверяет, не работает ли уже какой-нибудь поток с данными D. Если переменная F(D) установлена в 0, то данные заняты и проверка циклически повторяется. Если же данные свободны (F(D) =1), то значение переменной F(D) устанавливается в 0 и поток входит в критическую секцию. После того как поток выполнит все действия с данными D, значение переменной F(D) :нова устанавливается равным 1.
Блокирующие переменные могут использоваться не только при доступе к разделяемым данным, но и при доступе к разделяемым ресурсам любого вида.
Если все потоки написаны с учетом вышеописанных соглашений, то взаимное исключение гарантируется. При этом потоки могут быть прерваны операционной системой в любой момент и в любом месте, в том числе в критической секции.
Однако следует заметить, что одно ограничение на прерывания все же имеется. Нельзя прерывать поток между выполнением операций проверки и установки блокирующей переменной. Поясним это. Пусть в результате проверки переменной поток определил, что ресурс свободен, но сразу после того, не успев установить переменную в 0, был прерван. За время его приостановки другой поток занял ресурс, вошел в свою критическую секцию, но также был прерван, не завершив работы с разделяемым ресурсом. Когда управление было возвращено первому потоку, он, считая ресурс свободным, установил признак занятости и начал выполнять свою критическую секцию. Таким образом, был нарушен принцип взаимного исключения, что потенциально может привести к нежелательным последствиям. Во избежание таких ситуаций в системе команд многих компьютеров предусмотрена единая, неделимая команда анализа и присвоения значения логической переменной (например, команды ВТС, BTR и BTS процессора Pentium). При отсутствии такой команды в процессоре соответствующие действия должны реализовываться специальными системными примитивами, которые бы запрещали прерывания на протяжении всей операции проверки и установки.
Реализация взаимного исключения описанным выше способом имеет существенный недостаток: в течение времени, когда один поток находится в критической секции, другой поток, которому требуется тот же ресурс, получив доступ к процессору, будет непрерывно опрашивать блокирующую переменную, бесполезно тратя выделяемое ему процессорное время, которое могло бы быть использовано для выполнения какого-нибудь другого потока. Для устранения этого недостатка во многих ОС предусматриваются специальные системные вызовы для работы с критическими секциями.
На рис. 4ерационной системе Windows NT. Перед тем как начать изменение критических данных, поток выполняет системный вызов Enter-Critical Section О. В рамках этого вызова сначала выполняется, как и в предыдущем случае, проверка блокирующей переменной, отражающей состояние критического ресурса. Если системный вызов определил, что ресурс занят (FCD) - 0), он в отличие от предыдущего случая не выполняет циклический опрос, а переводит поток в состояние ожидания (D) и делает отметку о том, что данный поток должен быть активизирован, когда соответствующий ресурс освободится. Поток, который в это время использует данный ресурс, после выхода из критической секции должен выполнить системную функцию LeaveCriticalSectionQ, в результате чего блокирующая переменная принимает значение, соответствующее свободному состоянию ресурса (F(D) = 1), а операционная система просматривает очередь ожидающих этот ресурс потоков и переводит первый поток из очереди в состояние готовности.
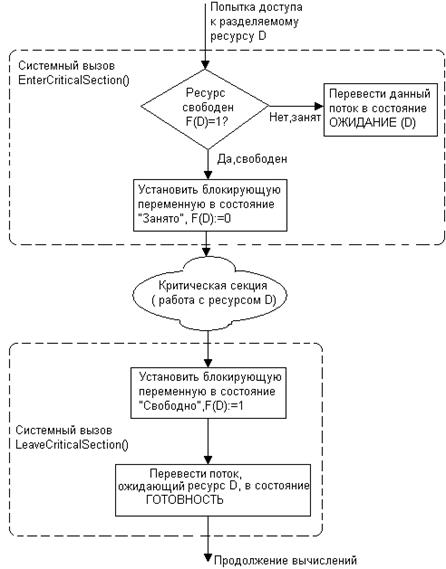
Рис. 4.5.Реализация взаимного исключения с использованием системных функций входа в критическую секцию и выхода ив нее
Таким образом исключается непроизводительная потеря процессорного времени на циклическую проверку освобождения занятого ресурса. Однако в тех случаях, когда объем работы в критической секции небольшой и существует высокая вероятность в очень скором доступе к разделяемому ресурсу, более предпочтительным может оказаться использование блокирующих переменных. Действительно, в такой ситуации накладные расходы ОС по реализации функции входа в критическую секцию и выхода из нее могут превысить полученную экономию.
Обобщением блокирующих переменных являются так называемые семафоры Дийкстры. Вместо двоичных переменных Дийкстра (Dijkstra) предложил использовать переменные, которые могут принимать целые неотрицательные значения. Такие переменные, используемые для синхронизации вычислительных процессов, получили название семафоров.
Для работы с семафорами вводятся два примитива, традиционно обозначаемых Р и V. Пусть переменная S представляет собой семафор. Тогда действия V(S) и P(S) определяются следующим образом.
V(S): переменная S увеличивается на 1 единым действием. Выборка, наращивание и запоминание не могут быть прерваны. К переменной S нет доступа другим потокам во время выполнения этой операции.
P(S): уменьшение S на 1, если это возможно. Если 5=0 и невозможно уменьшить S, оставаясь в области целых неотрицательных значений, то в этом случае поток, вызывающий операцию Р, ждет, пока это уменьшение станет возможным. Успешная проверка и уменьшение также являются неделимой операцией.
Никакие прерывания во время выполнения примитивов, V и Р недопустимы.
В частном случае, когда семафор S может принимать только значения 0 и 1, он превращается в блокирующую переменную, которую по этой причине часто называют двоичным семафором. Операция Р заключает в себе потенциальную возможность перехода потока, который ее выполняет, в состояние ожидания, в то время как операция V может при некоторых обстоятельствах активизировать другой поток, приостановленный операцией Р.
Рассмотрим использование семафоров на классическом примере взаимодействия двух выполняющихся в режиме мультипрограммирования потоков, один из которых пишет данные в буферный пул, а другой считывает их из буферного пула. Пусть буферный пул состоит из N буферов, каждый из которых может содержать одну запись. В общем случае поток-писатель и поток-читатель могут иметь различные скорости и обращаться к буферному пулу с переменой интенсивностью. В один период скорость записи может превышать скорость чтения, в другой — наоборот. Для правильной совместной работы поток-писатель должен приостанавливаться, когда все буферы оказываются занятыми, и активизироваться при освобождении хотя бы одного буфера. Напротив, поток-читатель должен приостанавливаться, когда все буферы пусты, и активизироваться при появлении хотя бы одной записи.
Введем два семафора: е — число пустых буферов, и f — число заполненных буферов, причем в исходном состоянии е = N, a f = 0. Тогда работа потоков с общим буферным пулом может быть описана следующим образом .
Поток-писатель прежде всего выполняет операцию Р(е), с помощью которой он проверяет, имеются ли в буферном пуле незаполненные буферы. В соответствии с семантикой операции Р, если семафор е равен 0 (то есть свободных буферов в данный момент нет), то поток-писатель переходит в состояние ожидания. Если же значением е является положительное число, то он уменьшает число свободных буферов, записывает данные в очередной свободный буфер и после этого наращивает число занятых буферов операцией V(f). Поток-читатель действует аналогичным образом, с той разницей, что он начинает работу с проверки наличия заполненных буферов, а после чтения данных наращивает количество свободных буферов.
В данном случае предпочтительнее использовать семафоры вместо блокирующих переменных. Действительно, критическим ресурсом здесь является буферный пул, который может быть представлен как набор идентичных ресурсов — отдельных буферов, а значит, с буферным пулом могут работать сразу несколько потоков, и именно столько, сколько буферов в нем содержится. Использование двоичной переменной не позволяет организовать доступ к критическому ресурсу более чем одному потоку. Семафор же решает задачу синхронизации более гибко, допуская к разделяемому пулу ресурсов заданное количество потоков. Так, в нашем примере с буферным пулом могут работать максимум N потоков, часть из которых может быть «писателями», а часть — «читателями».
Таким образом, семафоры позволяют эффективно решать задачу синхронизации доступа к ресурсным пулам, таким, например, как набор идентичных в функциональном назначении внешних устройств (модемов, принтеров, портов), или Hav бор областей памяти одинаковой величины, или информационных структур. Во всех этих и подобных им случаях с помощью семафоров можно организовать доступ к разделяемым ресурсам сразу нескольких потоков.
Приведенный выше пример позволяет также проиллюстрировать еще одну проблему синхронизации — взаимные блокировки, называемые также дедлоками (deadlocks), клинчами (clinch), или тупиками. Покажем, что если переставить местами операции Р(е) и Р(b) в потоке-писателе, то при некотором стечении обстоятельств эти два потока могут взаимно блокировать друг друга.
Итак, пусть поток-писатель начинает свою работу с проверки доступности критической секции — операции Р(b), и пусть он первым войдет в критическую секцию. Выполняя операцию Р(е), он может обнаружить отсутствие свободных буферов и перейти в состояние ожидания. Как уже было показано, из этого состояния его может вывести только поток-читатель, который возьмет очередную запись из буфера. Но поток-читатель не сможет этого сделать, так как для этого ему потребуется войти в критическую секцию, вход в которую заблокирован потоком-писателем. Таким образом, ни один из этих потоков не может завершить начатую работу и возникнет тупиковая ситуация, которая не может разрешиться без внешнего воздействия.
Рассмотрим еще один пример тупика. Пусть двум потокам, принадлежащим разным процессам и выполняющимся в режиме мультипрограммирования, для выполнения их работы нужно два ресурса, например принтер и последовательный порт. Такая ситуация может возникнуть, например, во время работы приложения, задачей которого является распечатка информации, поступающей по модемной связи.
Поток А запрашивает сначала принтер, а затем порт, а поток В запрашивает устройства в обратном порядке. Предположим, что после того, как ОС назначила принтер потоку А и установила связанную с этим ресурсом блокирующую переменную, поток А был прерван. Управление получил поток В, который сначала выполнил запрос на получение СОМ-порта, затем при выполнении следующей команды был заблокирован, так как принтер оказался уже занятым потоком А. Управление снова получил поток А, который в соответствии со своей программой сделал попытку занять порт и был заблокирован, поскольку порт уже выделен потоку В. В таком положении потоки А и В могут находиться сколь угодно долго.
В зависимости от соотношения скоростей потоков они могут либо взаимно блокировать друг друга, либо образовывать очереди к разделяемым ресурсам, либо совершенно независимо использовать разделяемые ресурсы .
Тупиковые ситуации надо отличать от простых очередей, хотя те и другие возникают при совместном использовании ресурсов и внешне выглядят похоже: поток приостанавливается и ждет освобождения ресурса. Однако очередь — это нормальное явление, неотъемлемый признак высокого коэффициента использования ресурсов при случайном поступлении запросов. Очередь появляется тогда, когда ресурс недоступен в данный момент, но освободится через некоторое время, позволив потоку продолжить выполнение. Тупик же, что видно из его названия, является в некотором роде неразрешимой ситуацией. Необходимым условием возникновения тупика является потребность потока сразу в нескольких ресурсах..
В рассмотренных примерах тупик был образован двумя потоками, но взаимно блокировать друг друга может и большее число потоков.
Невозможность потоков завершить начатую работу из-за возникновения взаимных блокировок снижает производительность вычислительной системы. Поэтому проблеме предотвращения тупиков уделяется большое внимание. На тот случай, когда взаимная блокировка все же возникает, система должна предоставить администратору-оператору средства, с помощью которых он смог бы распознать тупик, отличить его от обычной блокировки из-за временной недоступности ресурсов. И наконец, если тупик диагностирован, то нужны средства для снятия взаимных блокировок и восстановления нормального вычислительного процесса. Тупики могут быть предотвращены на стадии написания программ, то есть программы должны быть написаны таким образом, чтобы тупик не мог возникнуть при любом соотношении взаимных скоростей потоков. Так, если бы в вышеразобранном примере поток А и поток В запрашивали ресурсы в одинаковой последовательности, то тупик был бы в принципе невозможен. Другой, более гибкий подход к предотвращению тупиков заключается в том, что ОС каждый раз при запуске задач анализирует их потребности в ресурсах и определяет, может ли в данной мультипрограммной смеси возникнуть тупик. Если да, то запуск новой задачи временно откладывается. ОС может также использовать определенные правила при назначении ресурсов потокам, например, ресурсы могут выделяться операционной системой в определенной последовательности, общей для всех потоков.
В тех же случаях, когда тупиковую ситуацию не удалось предотвратить, важно быстро и точно ее распознать, поскольку блокированные потоки не выполняют никакой полезной работы. Если тупиковая ситуация образована множеством потоков, занимающих массу ресурсов, распознавание тупика является нетривиальной задачей. Существуют формальные, программно-реализованные методы распознавания тупиков, основанные на ведении таблиц распределения ресурсов и таблиц запросов к занятым ресурсам. Анализ этих таблиц позволяет обнаружить взаимные блокировки.
Если же тупиковая ситуация возникла, то не обязательно снимать с выполнения все заблокированные потоки. Можно снять только часть из них, освободив ресурсы, ожидаемые остальными потоками, можно вернуть некоторые потоки в область подкачки, можно совершить «откат» некоторых потоков до так называемой контрольной точки, в которой запоминается вся информация, необходимая для восстановления выполнения программы с данного места. Контрольные точки расставляются в программе в тех местах, после которых возможно возникновение тупика.
Дата добавления: 2016-06-02; просмотров: 3398;