Дискретные пороговые датчики
Дискретные тактильные датчики являются контактными приборами типа микропереключателей. В простейшем случае переключатель размещен на внутренней поверхности каждого пальца манипулятора (рис. 23.1).
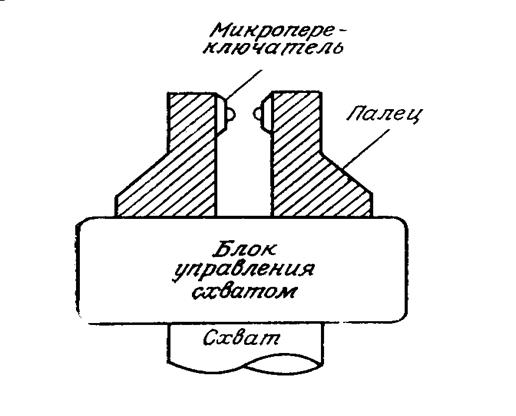
Рисунок 23.1. Простой схват робота с бинарными тактильными датчиками
Этот вариант очувствления используется для определения наличия детали между пальцами схвата. Перемещая манипулятор над объектом и последовательно производя контактирование с его поверхностью, можно также осуществить центрирование манипулятора относительно объекта для его схвата и переноса.
Путем размещения нескольких дискретных тактильных датчиков на внутренней поверхности каждого пальца схвата достигается расширение получаемого объема информации. Кроме того, они часто ставятся на внешней поверхности конечного звена манипулятора для получения управляющих сигналов, используемых при формировании траектории движения манипулятора в рабочем пространстве («ощупывание»).
Аналоговые датчики
Аналоговый тактильный датчик является регистрирующим прибором, выходной сигнал которого пропорционален прикладываемой силе. Простейший из таких приборов состоит из подпружиненного стержня (рис. 23.2), который механически связан с вращающейся осью.

Рисунок 23.2. Типичный аналоговый тактильный датчик
Горизонтальная сила, действующая на стержень, преобразуется в пропорциональный поворот оси. Этот поворот непрерывно измеряется с помощью потенциометра или кодовым устройством с дискретным выходом. При известной жесткости пружины сила соответствует указанному перемещению.
Для увеличения объема информации о процессе взаимодействия робота с объектом на схвате робота размещают матрицы тактильных датчиков, параметры которых меняются в зависимости от давления («графитовые столбики») (рис. 23.3).
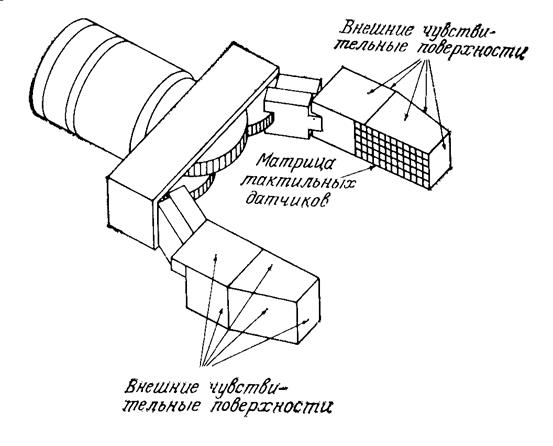
Рисунок 23.3. Схват робота, оснащенный матрицами тактильных датчиков
В таких устройствах, обычно называемых «искусственной кожей», давление от объекта вызывает соответствующие деформации, которые измеряются как непрерывно меняющееся сопротивление. Изменение сопротивления легко преобразуется в электрический сигнал, амплитуда которого пропорциональна силе, действующей на соответствующую точку поверхности матрицы.
Рассмотренные тактильные датчики измеряют силы, перпендикулярные к чувствительной поверхности датчика. Определение проскальзывания путем измерения тангенциального движения является другой важной задачей тактильного очувствления. Датчик для определения проскальзывания включает свободно вращающийся зубчатый шар, который отклоняет тонкий стержень, установленный на оси проводящего диска (рис. 23.4). Под диском равномерно расположены электрические контакты. Вращение шара, вызванное проскальзыванием по нему объекта, приводит к вибрации стержня и диска с частотой, пропорциональной скорости вращения шара. От направления вращения зависит, какой контакт будет задействован вибрирующим диском. Усредненное направление проскальзывания определяется по импульсам в соответствующих выходных электрических контурах.
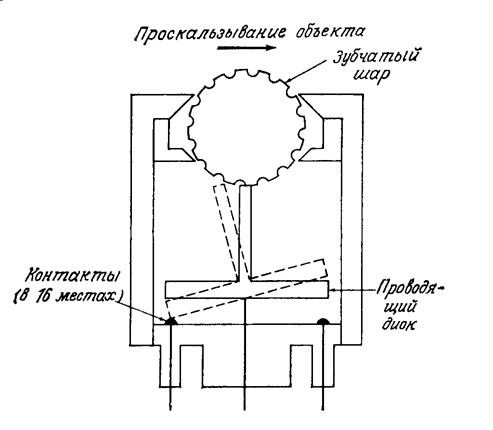
Рисунок 23.4. Устройство для определения величины и направления проскальзывания
Дата добавления: 2016-05-25; просмотров: 1193;