Индуктивные датчики
Индуктивные датчики– датчики, основанные на изменении индуктивности при взаимодействии с металлическим объектом, наиболее широко используются в промышленных роботах. Принцип работы этих датчиков можно объяснить по рис. 21.3. На рис.21.3,а представлена схема индуктивного датчика, который состоит из катушки, размещенной за постоянным магнитом в корпусе. Когда датчик приближается к ферромагнитному материалу, изменяется расположение силовых линий постоянного магнита (рис. 21.3,б и в). При отсутствии движения силовые линии не изменяются и, следовательно, в катушке ток не индуцируется. Изменение напряжения на выходе катушки обеспечивает эффективное очувствление в ближней зоне на расстояниях ~1 мм (рис. 21.4).
Так как для получения выходного сигнала на датчике требуется наличие относительного движения датчика и объекта, одним из методов получения дискретного порогового сигнала является интегрирование выходного сигнала.
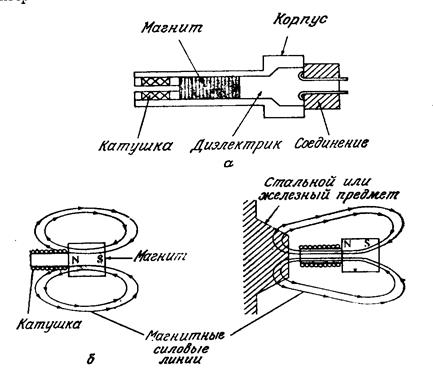
Рисунок 21-3. Индуктивный датчик (а), форма магнитных линий при отсутствии ферромагнетика (б) и при наличии ферромагнетика в зоне измерения датчика(в)
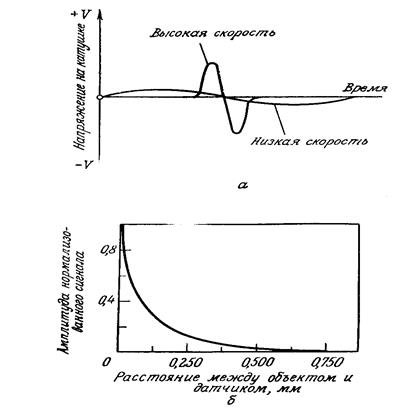
Рисунок 21.4. Зависимость выходного сигнала индуктивного датчика
от скорости
Пороговый сигнал остается на нижнем уровне, пока значение интеграла остается ниже установленного порога. После превышения порога сигнал переходит на верхний уровень, что соответствует наличию объекта в зоне измерения.
Датчики Холла
Эффект Холла связывает напряжение между двумя точками в проводнике или полупроводниковом материале в магнитном поле, воздействующим на этот материал. Используемые сами по себе датчики Холла могут уловить только намагниченные объекты. Однако, если их использовать вместе с постоянным магнитом (рис. 21.5), они способны установить наличие всех ферромагнитных материалов.
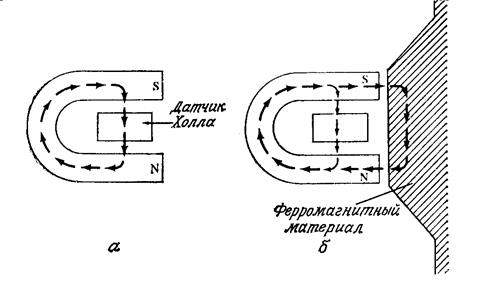
Рисунок 21.5. Работа датчика Холла (а), снабженного постоянным
магнитом (б)
Датчики Холла основаны на возникновении силы Лоренца, действующей на заряженную частицу, движущуюся в магнитном поле. Эта сила направлена по оси, перпендикулярной плоскости, образованной направлением движения заряженной частицы и направлением поля. Сила Лоренца определяется как  , где q – заряд; v – вектор скорости; В – вектор магнитного поля; а × - знак пересечения векторов. Предположим, что ток проходит через полупроводник n-типа, который находится в магнитном поле (рис. 21.6). Поскольку электроны являются основными носителями в материалах n-типа, а движение дырочного тока противоположно потоку электронов, сила, действующая на движущиеся отрицательно заряженные частицы имеет направление, показанное на рис. 21.6. Эта сила действует на электроны, которые скапливаются в нижней части материала. При внесении ферромагнетика в зону действия датчика Холла напряженность магнитного поля увеличивается, а сила Лоренца уменьшается. На полупроводнике возникает падение напряжения.
, где q – заряд; v – вектор скорости; В – вектор магнитного поля; а × - знак пересечения векторов. Предположим, что ток проходит через полупроводник n-типа, который находится в магнитном поле (рис. 21.6). Поскольку электроны являются основными носителями в материалах n-типа, а движение дырочного тока противоположно потоку электронов, сила, действующая на движущиеся отрицательно заряженные частицы имеет направление, показанное на рис. 21.6. Эта сила действует на электроны, которые скапливаются в нижней части материала. При внесении ферромагнетика в зону действия датчика Холла напряженность магнитного поля увеличивается, а сила Лоренца уменьшается. На полупроводнике возникает падение напряжения.
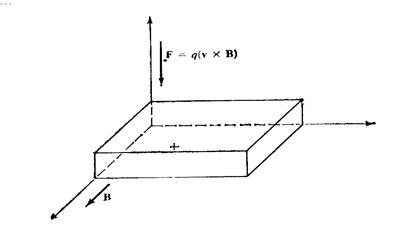
Рисунок 21.6. Возникновение эффекта Холла
Дискретный выходной сигнал, определяющий наличие объекта, реализуется пороговым ограничителем выходного напряжения датчика.
В качестве чувствительного элемента используется кремний, имеющий ряд преимуществ: малые размеры, высокую чувствительность, устойчивость к влиянию электрических помех, возможность использования электронного усилителя и обработки сигналов непосредственно на датчике, уменьшая тем самым размеры и стоимость.
Лекция 22
Емкостные датчики
Емкостные датчики обладают способностью обнаруживать все твердые и жидкие материалы. Как видно из названия, эти датчики основаны на изменении емкости, которая зависит от расстояния до поверхности объекта в зоне действия чувствительного элемента (рис.22.1).
Существует ряд методов обнаружения в ближней зоне, основанный на изменении емкости:
· конденсатор представляет собой элемент колебательного контура, колебания в котором возникают только в том случае, если емкость датчика превышает заданное пороговое значение. Колебания преобразуются затем в выходное напряжение, которое указывает на присутствие объекта в зоне измерения. Этот метод обеспечивает дискретный выходной сигнал, переключение которого зависит от значения заданного порога;
· емкостной элемент в контуре, по которому постоянно проходит синусоидальный сигнал частоты. Изменение емкости вызывает фазовый сдвиг между сигналом эталонной частоты и сигналом от емкостного элемента. Фазовый сдвиг пропорционален изменению емкости и следовательно, может быть использован для обнаружения объекта в ближней зоне.
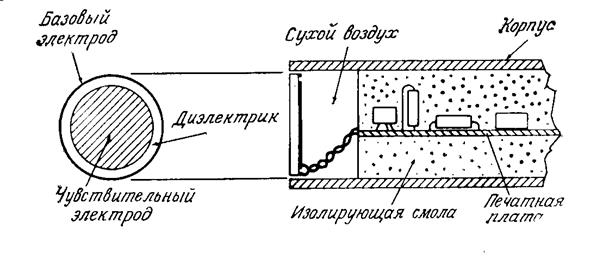
Рисунок 22.1. Емкостной датчик измерения в ближней зоне
На рис. 22.2 показано изменение емкости в зависимости от расстояния.

Рисунок 22.2. Зависимость процентного изменения емкости датчика
в ближней зоне от расстояния
Форма характеристики зависит от материала объекта измерения. Обычно такие датчики работают в дискретном пороговом режиме. Изменение емкости выше заданного порога Т соответствует наличию объекта, а ниже – его отсутствию в зоне, установленной величиной Т.
Дата добавления: 2016-05-25; просмотров: 1519;