Индуктивные датчики
Индуктивные датчики широко распространены в промышленности, так как они просты, надежны, бесконтактны, у них сравнительно большая отдаваемая мощность, могут работать на переменном токе промышленной частоты. Они используются в основном для измерения угловых и линейных перемещений, а также для измерения силы давления. Индуктивные датчики разделяются на датчики с подвижным якорем, подвижным сердечником и поворотным якорем.
На рис. 1.7 показана конструкция индуктивного датчика с подвижным якорем (а) и его характеристика (б) — зависимость тока I, протекающего в катушке, от воздушного зазора d между сердечником и якорем.
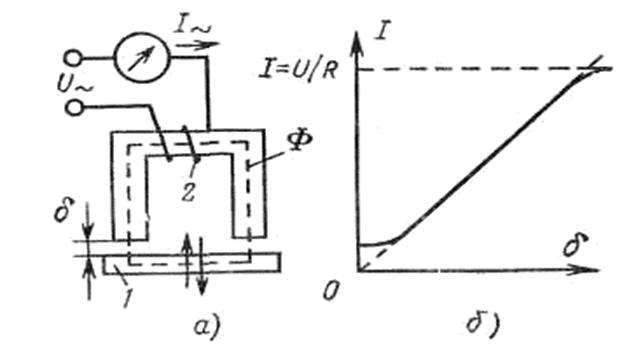
Рис. 1.7
Если перемещать якорь 1 датчика, воздушный зазор d будет изменяться, а следовательно, будет изменяться и индуктивность катушки 2. Индуктивность катушки обратно пропорциональна воздушному зазору, т. е. при больших зазорах индуктивность имеет малое значение, а при малых — большое.
Ток в катушке датчика определяется по формуле
 ?
?
где U – напряжение питания, Z – полное сопротивление катушки, R – активное сопротивление катушки, XL = 2pfL – индуктивное сопротивление катушки, f – частота питающего напряжения, L – индуктивность катушки, зависящая от воздушного зазора d.
Как видно из формулы, при постоянных U, R n f ток катушки зависит только от индуктивности (а следовательно, от воздушного зазора d). Таким образом, ток в катушке датчика пропорционален воздушному зазору d:
I= kd
где k — коэффициент пропорциональности или чувствительности датчика по току.
Реальная характеристика индуктивного датчика отличается от идеальной (показана пунктиром на рис. 1.7, б) наличием некоторой нелинейности. Большинство индуктивных датчиков предназначено для работы при относительно низких частотах напряжений питающей сети (до 5000 Гц), так как при более высоких частотах в значительной степени растут потери в стали на перемагничивание и реактивное сопротивление обмотки.
Индуктивные датчики использовались в автоматических метеорологических станциях в схемах измерения атмосферного давления.
Емкостные датчики
Емкостный датчик представляет собой плоский конденсатор с изменяемой емкостью.
Емкостные датчики, как и индуктивные, работают на переменном токе, только в отличие от индуктивных в большинстве случаев работают на частотах выше 1 кГц.
 Принцип действия их основан на изменении емкости конденсатора при перемещении обкладок конденсатора относительно друг друга. Это легко понять, если вспомнить формулу емкости плоского конденсатора
Принцип действия их основан на изменении емкости конденсатора при перемещении обкладок конденсатора относительно друг друга. Это легко понять, если вспомнить формулу емкости плоского конденсатора
С= 
где e —диэлектрическая проницаемость; S — площадь перекрывания пластин; d — расстояние между пластинами.
Из приведенной формулы видно, что емкость конденсатора может быть изменена за счет изменения расстояния между пластинами б, площади пластин S или диэлектрической проницаемости среды е.
На рис. 1.8 показаны разновидности конструкций емкостных датчиков.
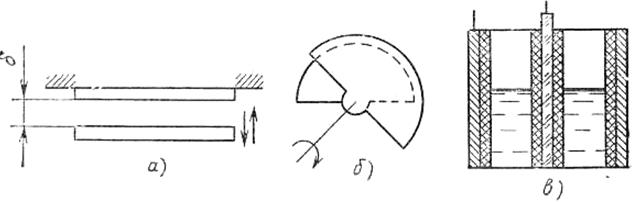
а — с переменным расстоянием между пластинами, б — с переменной площадью пластин; в — с переменной диэлектрической проницаемостью.
Рис. 1.8
К преимуществам емкостных датчиков относятся большая чувствительность. Однако эти датчики получили небольшое распространение в наземной обслуживаемой аппаратуре, так как имеют серьезные недостатки. В частности, они непригодны для работы, на низких частотах и требуют специального высокочастотного генератора. Но эти условия выполнимы в радиозондах и метеорологических ракетах, где высокочастотные генераторы используются в радиопередатчиках.
Дата добавления: 2016-03-15; просмотров: 2061;