Датчики инклинометров
Основными элементами любого инклинометра являются датчики измеряемых параметров кривизны. Информация с датчиков фиксируется, а затем тем или иным путем поступает на поверхность, где и расшифровывается.
2.1.1. Датчики зенитного угла
Для измерения зенитного угла скважины используются гравитационные датчики, определяющие угол между осью инклинометра в данной точке ствола, и направлением вектора силы тяжести. Само направление этого вектора определяется с помощью либо отвеса, либо свойства горизонтальности уровня жидкости, либо металлического шарика, находящегося на вогнутой сферической поверхности, либо пузырька воздуха в жидкости под сферической поверхностью, либо с помощью акселерометров, реагирующих на величину ускорения свободного падания.
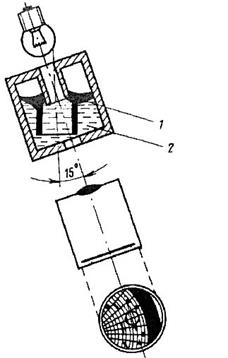 Рис. . Датчик инклинометра фирмы «Кастер»
Рис. . Датчик инклинометра фирмы «Кастер»
|
В качестве примера на рис. 7 показан датчик инклинометра фирмы «Кастер», использующий принцип горизонтальности уровня жидкости. Датчик состоит из корпуса, частично заполненного жидкостью, в которой плавает свободно вращающийся поплавок 1, выполненный из прозрачного материала. На поплавке выгравированы концентрические окружности, определяющие зенитный угол скважины. В нижней части датчика нанесена линия начала отсчета 2. Под датчиком расположен фотографический аппарат, с помощью которого фиксируются изображение поплавка с гравировкой и линия начала отсчета.
На рис. 8 показана схема простейшего акселерометра, позволяющего получить информацию о положении инклинометра относительно вертикали. Чувствительным элементом его является инерционная масса 1, закрепленная пружинами 2. Перемещение груза 1 возможно только в направлении 0Z, которое называется осью чувствительности. При наличии гравитации в направлении этой оси, груз перемещается до тех пор, пока гравитационная сила не уравновесится силой противодействия пружин.
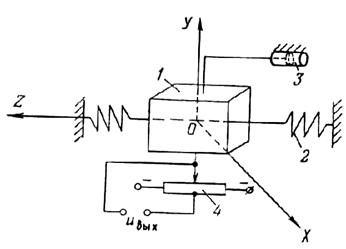 Рис. 8. Схема простейшего акселерометра
Рис. 8. Схема простейшего акселерометра
|
Для успокоения колебаний используется демпфер 3. Величина перемещения груза преобразуется в электрический сигнал реохордом 4.
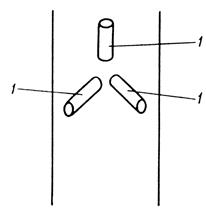 Рис. 9.Кинематическая схема датчика с тремя аксерерометрами: 1- акселерометры
Рис. 9.Кинематическая схема датчика с тремя аксерерометрами: 1- акселерометры
|
В большинстве конструкций инклинометров используется три акселерометра. Оси чувствительности их взаимно перпендикулярны между собой, а ось одного датчика совпадает с продольной осью инклинометра (рис. 9). При такой схеме расположения датчики измеряют величину вектора силы тяжести в трех взаимноперпендикулярных направлениях, а суммарный вектор определяет направление силы тяжести. Угол между этим вектором и осью прибора (осью одного из датчиков) равен зенитному углу скважины.
В широко распространенных до недавнего времени инклинометрах типа КИТ, показанного на рис. 12, в качестве датчика зенитного угла используется отвес 2, перемещающийся по реорхорду 3.
2.1.2. Датчики азимута
В качестве датчиков азимута в инклинометрах используются магнитомеханические, индукционные и гироскопические преобразователи. Магнитомеханические датчики представляют собой магнитную стрелку, или постоянный магнит, реагирующие на магнитное поле Земли. Так, например, на поплавке инклинометра фирмы Кастер закреплен постоянный магнит, за счет чего поплавок поворачивается вокруг оси и ориентируется в направлении магнитного поля Земли. В инклинометрах типа КИТ в качестве датчика азимута используется магнитная стрелка. В индукционных датчиках азимута чаще всего используются феррозондовые преобразователи. Простейший датчик такого типа показан на рис.10. На ферромагнитном сердечнике выполнено две обмотки – возбуждения Wв, создающая вспомогательное переменное магнитное поле, и измерительная Wи, в которой наводится выходной сигнал, пропорциональный величине измеряемого магнитного поля Но. Сигнал будет максимальным в случае, если продольная ось феррозонда параллельна на магнитному меридиану (направлена на магнитный полюс). Преимущество такого датчика заключается в отсутствии подвижных частей.
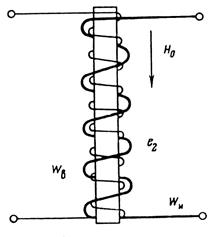 Рис. 10. Однокомпонентный феррозонд с продольным возбуждением
Рис. 10. Однокомпонентный феррозонд с продольным возбуждением
|
В инклинометрах используется, как правило, три феррозондовых преобразователя по такой же схеме, как и акселерометры. Суммарный вектор датчиков определяет направление на северный магнитный полюс Земли.
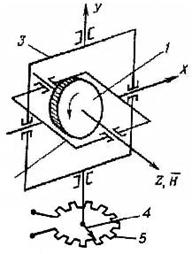 Рис. 11. Датчик азимута на основе свободного трехстепенного гироскопа
Рис. 11. Датчик азимута на основе свободного трехстепенного гироскопа
|
В случае, если магнитные датчики азимута не могут быть использованы (в обсаженных скважинах, зонах магнитных аномалий) применяются гироскопические устройства. Датчик азимута на основе гироскопа с тремя степенями свободы показан на рис. 11. Ротор 1 гироскопа вращается относительно кожуха 2, служащего внутренней рамкой подвеса. Кожух 2 может поворачиваться относительно наружной рамки 3, которая, в свою очередь, может поворачиваться относительно основания. С основанием (корпусом инклинометра) жестко связан реохорд 5, а движок 4 его – с наружной рамкой 3.
При повороте корпуса прибора вокруг оси Y наружная рамка 3 сохраняет свое положение в пространстве, движок 4 перемещается по реохорду. Электрический сигнал, полученный с реохорда, пропорционален углу поворота корпуса датчика.
Дата добавления: 2016-04-22; просмотров: 3402;