Конструктивные особенности шумоподавителей
Принцип действия шумоподавителей основан на фильтрации телевизионного сигнала с помощью гребенчатых фильтров.
Как известно, спектр телевизионного сигнала имеет дискретную структуру с гармониками, кратными частотам повторения строк и кадров; причем последние группируются в виде достаточно узких боковых полос вокруг гармоник строчной частоты. В то же время спектральная плотность шума распределена по всему спектру и практически одинакова как в области спектральных составляющих телевизионного сигнала, так и между ними. Поэтому гребенчатый фильтр о максимумами коэффициента передачи на частотах, кратных частоте строчной развертки (пространственная фильтрация) или частоте воспроизведения кадров (временная фильтрация), уменьшает флуктуационные помехи за счет подавления шумовых составляющих, расположенных в минимумах коэффициента передачи.
Фильтры с узкими максимумами коэффициента передачи, чередующимися через 25 или 15 25 Гц в полосе пропускания видеотракта с fв ≈ 6,25 МГц, реализуются лишь на базе нерекурсивных и рекурсивных гребенчатых фильтров.
Принцип действия этих фильтров заключается во взвешенном сложении телевизионных сигналов от соседних кадров или строк, а возможность их применения - на использовании высокой кадровой и строчной корреляции телевизионных изображений [11]. Например, простое сложение сигналов от двух соседних кадров телевизионного изображения приводит к двукратному увеличению размаха сигнала, в то время как действующее значение флуктуационных помех увеличивается лишь в √2 раз. Однако движущиеся объекты при такой обработке сигналов в изображении будут «смазаны», т.е. будут воспроизводиться с меньшей четкостью. Очевидно, что в этом случае выигрыш в повышении отношения сигнал-шум уменьшается.
Временные нерекурсивные гребенчатые фильтры (с прямыми связями) первого и второго порядков содержат оперативные запоминающие устройства (ОЗУ) для задержки входного сигнала на время Т0 и сумматор с умножителями для взвешенного сложения входного и задержанного сигналов. При этом гребенчатая форма амплитудно-частотной характеристики подобных фильтров представляет периодическую функцию с периодом, равным времени задержки в ОЗУ, т.е. Т0 = 2π/ω0. В то же время длительность фронта переходной характеристики таких фильтров оценивается числом интервалов nф времени задержки Т0.
Практически в нерекурсивных фильтрах нельзя получить достаточно узкие максимумы АЧХ. Поэтому из-за сравнительно малой эффективности подавления флуктуационных помех они чаще используются в сочетании с рекурсивными в так называемых канонических фильтрах с прямыми и обратными независимыми связями.
Повышение эффективности подавления шумов можно достигнуть за счет одновременного использования межкадровой, межстрочной и межэлементной корреляции телевизионных сигналов путем соответственно временной и пространственной (вертикальной и горизонтальной) фильтраций. Реализация подобного шумопо-давителя возможна с помощью гребенчатого фильтра третьего порядка с разными временными задержками на время длительности кадра, строки и элемента изображения (т.е. трех последовательно включенных канонических фильтров с ОЗУ на Т0к = zT0 = 40 мс, Т0стр = Т0 = 64 мкс и Т0эл = 62,5...85 не). Последний фильтр по существу представляет собой фильтр нижних частот, понижающий уровень высокочастотных составляющих сигнала и шума.
Эффективность подавления флуктуационных помех гребенчатыми фильтрами при одинаковой корреляции между отдельными кадрами и между строками не зависит от абсолютной величины времени задержки сигнала Т0 в ОЗУ, т.е. от частоты повторения максимумов АЧХ (f0к = 25 Гц и f0стр = 15 625 Гц). В действительности же оно определяется фактическими величинами корреляций сигналов конкретного телевизионного изображения. Поэтому величина и характер искажений изображения, возникающих при временной или пространственной фильтрации реальных изображений, будут различны.
Очевидно, что при передаче статических изображений временная фильтрация из-за полной корреляции отдельных кадров не вносит искажений. Только появление новых статических объектов при временной фильтрации происходит с «задержкой предъявления» их во времени в соответствии с величиной nфТ0к. Использование же пространственной фильтрации при сложении сигналов от некоррелированных участков соседних строк во всех случаях (даже для статических изображений) сопровождается уменьшением четкости по вертикали (из-за размытия горизонтальных границ и уменьшения контраста мелких деталей), а также «задержкой предъявления» (сдвигом) объекта по вертикали (воспроизведения его на последующих строках в соответствии с величиной длительности фронта переходной характеристики nфТ0стр).
Наконец, при любом виде временной гребенчатой фильтрации движущиеся объекты будут «смазываться» пропорционально скорости их движения. Поэтому эффективное подавление шумов может проводиться с помощью временной фильтрации и только для неподвижных участков изображений. Следовательно, в общем случае при изменении корреляции сигналов и при передаче мелких деталей необходима адаптивная перестройка параметров гребенчатых фильтров в режиме реального времени так, чтобы обеспечить максимально возможное качество изображения за счет рационального обмена между частными параметрами - четкостью и отношением сигнал-помеха. Эту задачу в шумоподавителе выполняет анализатор корреляции сигналов, так называемый детектор движения, в котором в результате сравнения сигналов на входе и выходе ОЗУ формируется управляющий сигнал, изменяющий значения весовых коэффициентов взвешивания.
В отличие от пространственной фильтрации, где можно применить любую форму сигналов - аналоговую и цифровую (из-за относительной простоты реализации задержки сигнала на Т0стр = 64 мкс с помощью линий задержки), в шумоподавителях с временной фильтрацией приходится использовать цифровую форму сигнала из-за необходимости задержки сигнала на кадр Т0к = 40 мс.
Структурная схема цифрового шумоподавителя с рекурсивным фильтром приведена на рис. 6.12 [4]. Шумоподавитель данной конструкции отличается простотой реализации детектора движения. В данном случае достаточно использовать цифровое устройство с высоким быстродействием. На рис. 6.12 детектор движения представлен ОЗУ на Т0к, формирователем разностного сигнала соседних кадров ∑2, формирователем сигналов управления (ФСУ), умножителями для взвешенного сложения сигналов в сумматоре ∑1.
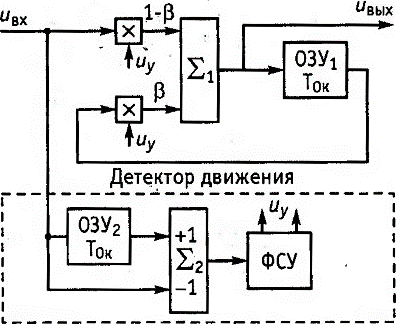
Рис. 6.12. Структурная схема цифрового шумоподавителя на основе рекурсивного фильтра
Опытным путем установлено, что применение подобных шумоподавителей позволяет существенно (до 12 дБ) повысить отношение сигнал-помеха.
Дата добавления: 2016-03-15; просмотров: 1670;