Лекция №8. Принципы организации микропроцессорной системы
Содержание лекции:модульный принцип построения микропроцессорной системы, интерфейс, варианты шинной организации, способы программно-управляемого обмена, адаптеры программируемых параллельного и последовательного ввода-вывода.
Цели лекции:изучить основные понятия и приемы, используемые при организации МПС, познакомиться с тремя способами программно-управляемого обмена, оценить работу параллельного и последовательного интерфейсов.
При реализации современных МПС широко используется модульный принцип, в соответствии с которым МПС строится из набора устройств и блоков - модулей, реализующих законченные функции и обладающих свойством независимости от других модулей. Для соединения модулей между собой служат проводники для передачи сигналов - шины. Шины, объединенные по функциональному признаку, называются магистралью. Совокупность шин, связывающих два модуля и алгоритм, определяющий порядок обмена информацией между ними, называется интерфейсом. Интерфейс характеризуют его ширина (максимальная разрядность передаваемых по нему данных) и скорость (бит/с).
На рисунке 21 показано использование единого (системного) интерфейса, к которому подключаются все устройства, входящие в состав МПС. Периферийные устройства (ПУ) подключаются к единому интерфейсу через контроллер, предназначенным для управления ПУ. Каждый тип ПУ требует применения специфичного контроллера. ПУ подключается к контроллеру с помощью интерфейса устройства.
 |
Рисунок 21 – Схема использования единого интерфейса
Применение единого интерфейса обуславливает следующие правила обмена информацией:
1) информация передается словами, ширина интерфейса обычно равна длине слова памяти;
2) в каждый момент времени обменивается информацией одна пара устройств - источник и приемник;
3) прямой обмен информацией между двумя ПУ невозможен: источником или приемником информации всегда является процессор или память.
Для шинной организации МПС используются двухшинная или трехшинная структуры. На рисунке 22 показана двухшинная структура. Сокращение количества шин достигается за счет объединения адресной шины и шины данных. При этом возникает так называемая мультиплексируемая шина, по которой в одни моменты времени передаются адреса, а в другие - данные. Это позволяет значительно сократить количество выводов МП БИС.
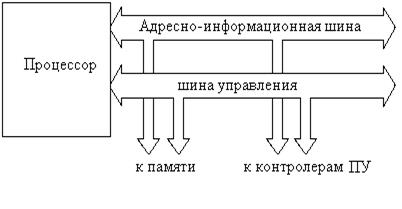 |
Рисунок 22 – Двухшинная организация микропроцессорной системы
Во всех МПС применяется программно-управляемый обмен данными с ПУ. При этом обмен идет под управлением программы через регистры процессора одним из трех способов - синхронным, асинхронным и по прерыванию.
При синхронном обмене синхронизирующие сигналы МП задают временной интервал, в течение которого производится обмен с ПУ.
При асинхронном обмене интервал между командами передачи данных задается самим внешним устройством. При этом МП тратит время на ожидание готовности ПУ к обмену и во время этого ожидания не производит никакой другой работы по обработке данных.
Обмен по прерыванию программы отличается от асинхронного обмена тем, что готовность ПУ к обмену проверяется при помощи аппаратных средств МПС. При этом МП выполняет какую-либо из программ (основную, фоновую), не связанную с обменом. Когда ПУ готово к приему или выдаче информации, оно посылает сигнал готовности, воспринимаемый контроллером прерываний (КП). КП прерывает исполнение основной программы и передает управление подпрограмме, организующей нужный вид обмена данными. Когда выполнение подпрограммы завершается, возобновляется работа МПС по основной программе.
Обмен большими массивами данных с. памятью осуществляется в режиме прямого доступа к памяти (ПДП) под управлением контроллера прямого доступа в память. В этом режиме шины данных и адресов отдаются в распоряжение ПУ и МП в операциях обмена участия не принимает.
Для обеспечения связи МП с различными внешними устройствами разработаны контроллеры (адаптеры), обеспечивающие связь с ПУ по стандартному параллельному каналу передачи данных и связь с ПУ по стандартному последовательному каналу передачи данных.
На рисунке 23 представлен программируемый параллельный адаптер (ППИ), который обеспечивает подключение ПУ к шине данных системного интерфейса МПС через три независимых двунаправленных канала (порта) ввода-вывода: А, В и С. Управляющие сигналы определяют режим работы (синхронный, асинхронный, чтение, запись) и используемые для обмена каналы.
 |
Рисунок 23 – Схема программируемого параллельного адаптера
Программирование ППИ осуществляется подачей в его регистр (РУС) управляющего слова, с помощью которого, при первом его формате задается направление передачи каждого из портов и один из трех режимов работы:
1) режим 0 – простой ввод-вывод данных в синхронном режиме побайтно через порты А,В, и С или дополнительно через порт С- потетрадно;
2) режим 1 – стробируемый ввод-вывод, при котором происходит обмен данными с ПУ через порты А и В в асинхронном режиме и режиме прерывания программы, сопровождаемая управляющими сигналами, проходящими через порт С;
3) режим 2 – двунаправленная магистраль обмена данными с ПУ через порт А в режиме прерывания программы, при этом пять разрядов порта С используются для передачи и приема управляющих сигналов. Порт В можно запрограммировать на работу в режимах 0 и 1.
Второй формат управляющего слова используется для установки или сброса произвольного разряда порта С.
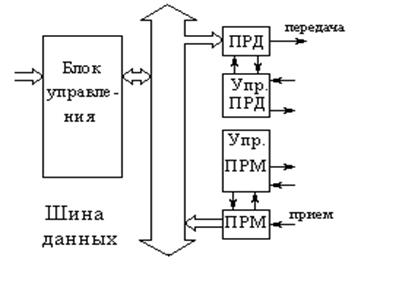 |
На рисунке 24 представлено приемно-передающее устройство, предназначенное для преобразования информации, снимаемой с МД МПС из параллельной формы в последовательную и обратно. Другое название устройства - универсальный синхронно-асинхронный приемопередатчик. Устройство имеет в своем составе два независимых последовательных интерфейса: ввода (приемник) и вывода (передатчик). Связь приемника и передатчика БИС с системным интерфейсом МПС осуществляется через двунаправленный буфер данных по шине данных.
Рисунок 24 – Схема приемно-передающего устройства
Схема управления адаптера служит для формирования внутренних управляющих сигналов из сигналов системного интерфейса. Она содержит регистры слова приказа и слова режима, содержимое которых определяет режим работы устройства: синхронный или асинхронный . В слове режима также задается скорость передачи, длина передаваемого символа, количество стоп-битов, наличие проверки на четность.
Для организации работы микропроцессорной системы в режиме реального времени можно использовать программируемый таймер, который позволяет формировать сигналы с разными временными интервалами и частотными характеристиками.
Важной архитектурной особенностью МПС являются прерывания, которые позволяют эффективно организовать работу МП при наличии нескольких параллельных процессов. Для технической реализации прерываний используют программируемые контроллеры прерываний.
Дата добавления: 2015-12-01; просмотров: 2089;