Схема соединения звезда
Рис. 1
Провод OO’ называется нулевым или нейтральным, остальные — линейными. Введем следующие понятия:
· Iл — линейный ток — это ток протекающий по линейному проводу;
· Uл — линейное напряжение — это напряжение между линейными проводами;
· Iф — фазный ток — это ток, протекающий от начала к концу фазной обмотки или приемника энергии (или наоборот: от конца — к началу);
· Uф — фазное напряжение — это напряжение между началом и концом фазной обмотки или приемника энергии. Другими словами можно сказать: фазное напряжение — это напряжение между линейным и нулевым проводами.
При неравномерной нагрузке на фазах возникает явление смещения нейтрали, т. е. в нулевой точке потенциал становится отличным от нуля. Поэтому напряжение на фазах так же будет отличаться от нормального, чем больше неравномерность нагрузки, тем больше отличие фазных напряжений. Ток в нулевом проводе это уравнивает. Симметричная трехфазная система напряжений характеризуется одинаковыми по модулю и фазе напряжениями во всех трех фазах. При несимметричных режимах напряжения в разных фазах не равны.
Треугольник
Треугольник — такое соединение, когда конец первой фазы соединяется с началом второй фазы, конец второй фазы с началом третьей, а конец третьей фазы соединяется с началом первой.
Соотношение между линейными и фазными токами и напряжениями[править | править вики-текст]
Для соединения обмоток треугольником, при симметричной нагрузке, справедливо соотношение между линейными и фазными токами и напряжениями:

Мощность трёхфазного тока[править | править вики-текст]
Для соединения обмоток треугольником, при симметричной нагрузке, мощность трёхфазного тока равна:

14. Трехфазная цепь является совокупностью трех электрических цепей, в которых действуют синусоидальные ЭДС одинаковой частоты, сдвинутые относительно друг друга по фазе на 120o, создаваемые общим источником. Участок трехфазной системы, по которому протекает одинаковый ток, называется фазой.
Трехфазная цепь состоит из трехфазного генератора, соединительных проводов и приемников или нагрузки, которые могут быть однофазными или трехфазными.
Трехфазный генератор представляет собой синхронную машину. На статоре генератора размещена обмотка, состоящая из трех частей или фаз, пространственно смещенных относительно друг друга на 120o. В фазах генератора индуктируется симметричная трехфазная система ЭДС, в которой электродвижущие силы одинаковы по амплитуде и различаются по фазе на 120o. Запишем мгновенные значения и комплексы действующих значений ЭДС.
Трехфазная цепь является обычной цепью синусоидального тока с несколькими источниками.
Активная мощность трехфазной цепи равна сумме активных мощностей фаз
 (6.5)
(6.5)
Формула (6.5) используется для расчета активной мощности в трехфазной цепи при несимметричной нагрузке.
При симметричной нагрузке:

При соединении в треугольник симметричной нагрузки
При соединении в звезду
 .
.
В обоих случаях  .
.
15.Защитное зануление применяют в 3х фазных сетях до 1 кВ с глухозаземленной нейтралью.
Принципиальная схема зануления представлена на рис. 4.9.
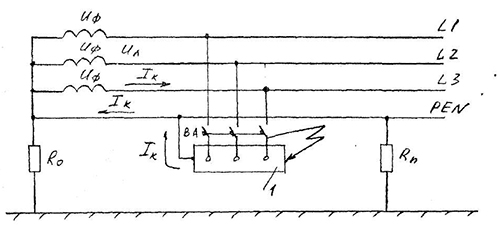
Рис.4.9 Принципиальная схема защитного зануления в сети с глухозаземленной нейтралью. 1 - корпус потребителя электроэнергии; Ro - сопротивление заземления нейтрали источника тока; Rn – сопротивление повторного заземления нулевого защитного проводника; ВА - автоматический выключатель с защитой.
Основное назначение защитного зануления – устранение опасности поражения электрическим током в случае прикосновения к корпусу и другим нетоковедущим металлическим частям электроустановки, оказавшейся под напряжением вследствие замыкания на корпус за счёт быстрого отключения электроустановки от сети действием защиты.
Однако, поскольку корпус оказывается заземленным через нулевой защитный проводник, то в аварийный период (с момента возникновения замыкания на корпус до отключения электроустановки от сети защитой) будет проявляться защитное свойство заземления.
Принцип действия защитного зануления основан на превращении замыкания на корпус в однофазное к.з. с целью вызвать большой ток, способный обеспечить срабатывание защиты и тем самым отключить поврежденную электроустановку от сети.
Нулевой защитный проводник в схеме защитного заземления предназначен для создания тока однофазного к.з. цепи с малым сопротивлением, чтобы этот ток был достаточным для быстрого срабатывания защиты (т.е. быстрого отключения поврежденной электроустановки от питающей сети).
16.Магнитное поле –одна из двух сторон электромагнитного поля, характеризующаяся воздействием на электрически заряженную частицу с силой, пропорциональной заряду частицы и ее скорости.
 Магнитное поле изображается силовыми линиями, касательные к которым совпадают с ориентацией магнитных стрелок, внесенных в поле (рис. 3.1). Таким образом, магнитные стрелки как бы являются пробными элементами для магнитного поля.
Магнитное поле изображается силовыми линиями, касательные к которым совпадают с ориентацией магнитных стрелок, внесенных в поле (рис. 3.1). Таким образом, магнитные стрелки как бы являются пробными элементами для магнитного поля.
За положительное направление магнитного
поля условно принимают направление
северного полюса магнитной стрелки.
Можно утверждать, что магнитное поле
и электрический ток — взаимосвязанные явления.
Вокруг проводника, в котором существует ток,
всегда имеется магнитное поле, и, наоборот,
в замкнутом проводнике, движущемся в
магнитном поле, возникает ток.
Рассмотрим количественные характеристики
магнитного поля.
17. Электрической прочностью называется свойство диэлектрика сохранять свое электрическое сопротивление при приложении напряжения. Потери диэлектриком своих изоляционных свойств при превышении напряженности поля некоторого критического значения называется пробоем, напряжение – пробивным напряжением.
Электрическую прочность определяю величиной пробивного напряжения, отнесенного к толщине диэлектрика в месте пробоя:
Пробой диэлектриков может наступать в результате электрических, тепловых, а также электрохимических процессов, происходящих под действием электрического поля. Механизм пробоя лучше всего рассматривать в зависимости о агрегатного состояния вещества.
Электрическая прочность измеряется в вольтах на единицу расстояния (обычно В/см) и сильно варьирует с диэлектриком:
§ cлюда, кварц и другиe твёрдые диэлектрики с хорошими изолирующими свойствами обладают прочностью до 106—107 В/см;
§ электрическая прочность жидкого диэлектрика очень сильно зависит от его чистоты и также может достигать 106 В/см;
§ электрическая прочность газов линейно зависит от давления (закон Пашена) и существенно — от толщины слоя («отклонения» от закона Пашена); в случае воздуха в нормальных условиях с толщиной слоя 1 см электрическая прочность составляет приблизительно 3×104 В/см, у элегаза — в 2-4 раза выше.
Диамагнетизм наблюдается во всех веществах и связан тем, что внешнее магнитное поле оказывает влияние на орбитальное движение электронов, вследствие чего индуцируется магнитный момент, направленный навстречу внешнему полю. После снятия внешнего магнитного поля индуцированный магнитный момент диамагнетика исчезает. Магнитная восприимчивость диамагнетиков кd (отрицательная) по абсолютному значению очень мала; она не зависит ни от температуры, ни от напряженности магнитного поля. Диамагнетик выталкивается из магнитного поля. В соответствии с магнитными свойствами все материалы делятся на следующие группы: диамагнитные, парамагнитные, ферромагнитные, антиферромагнитные и ферримагнитные. Парамагнитные вещества отличаются тем, что состоят из атомов с не полностью заполненными оболочками, т.е. обладающих магнитными моментами. Но такие атомы находятся друг от друга достаточно далеко, так, что взаимодействие между ними отсутствует. Поэтому у парамагнетиков магнитные моменты атомов ориентируются в направление внешнего магнитного поля и усиливают его. днородно намагниченное тело:

Любое вещество, помещенное в магнитное поле, приобретает некоторый магнитный момент. Намагниченность J – это магнитный момент единицы объема.
В несильных полях намагниченность прямо пропорциональна напряженности поля, вызывающего намагничивание: :

Если же тело намагничено неоднородно (состоит из нескольких частей), то намагниченностьопределяется для каждого физически малого объема dV

18. овокупность устройств, содержащих ферромагнитные тела и образующих замкнутую систему, в которой существует магнитный поток и вдоль которой замыкаются линии магнитной индукции, называется магнитной цепью.
Магнитное поле в вещественных средах описывается тремя векторами:
1) вектором магнитной индукции В, характеризующим силовое действие магнитного поля на ток по закону Ампера, а при изменении магнитного поля - возбуждение электрического поля по закону электромагнитной индукции (Фарадея);
2) вектором намагниченности материала М, выражающим магнитный момент единицы объема намагниченного вещества или сумму магнитных моментов элементарных магнитных диполей в единице его объема;
3) вектором напряженности магнитного поляН, который выражается через первые два вектора как разность этих векторов, взятых с соответствующими коэффициентами, зависящими от выбранной системы единиц измерения. В системе СИ

где  Гн/м - магнитная постоянная.
Гн/м - магнитная постоянная.
При расчете магнитных цепей основными скалярными величинами, характеризующими магнитную цепь, являются:
1) магнитный поток Ф, который определяется как поток вектора магнитной индукции через поверхность поперечного сечения магнитопровода:
 2) магнитодвижущая сила (МДС) F, которая выражается через электрический ток i в проводах, обмотках и т. д., создающий магнитное поле:
2) магнитодвижущая сила (МДС) F, которая выражается через электрический ток i в проводах, обмотках и т. д., создающий магнитное поле:

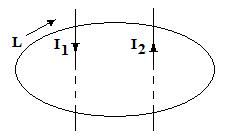 На картинке выше изображены два провода, по которым текут токи I1 и I2. Вокруг токов имеется контур L. А что такое этот контур? Это просто замкнутая линия, которую мы мысленно провели вокруг токов. Токи проходят через поверхность, ограниченную контуром L. В качестве положительного направления обхода контура выбираем направление по часовой стрелке.
На картинке выше изображены два провода, по которым текут токи I1 и I2. Вокруг токов имеется контур L. А что такое этот контур? Это просто замкнутая линия, которую мы мысленно провели вокруг токов. Токи проходят через поверхность, ограниченную контуром L. В качестве положительного направления обхода контура выбираем направление по часовой стрелке.
| Первый закон Кирхгофа | 
| Алгебраическая сумма магнитных потоков в узле магнитопровода равна нулю |
| Второй закон Кирхгофа | 
| Алгебраическая сумма падений магнитного напряжения вдоль замкнутого контура равна алгебраической сумме МДС, действующих в контуре |
| Закон Ома |  где где 
| Падение магнитного напряжения на участке магнитопровода длиной  равно произведению магнитного потока и магнитного сопротивления равно произведению магнитного потока и магнитного сопротивления  участка участка
|
При расчете магнитных цепей встречаются два вида задач: прямая и обратная. Прямая задача предполагает определение магнитодвижущей силы по заданному магнитному потоку, а обратная – нахождение магнитного потока по заданной МДС.
19. Магнитные цепи, магнитное поле которых обычно возбуждается катушками с ферромагнитными сердечниками, питающимися от источников переменного тока, называются магнитными цепями с переменной МДС.
Рассмотрим индуктивную катушку с ферромагнитным сердечником, которая подключена к источнику переменного тока. Если
1 – обмотка с числом витков w
2 – магнитный поток Ф
l1 – воздушный зазор
Если приложить к обмотке переменное напряжение U, то в ней потечёт ток I, который наведёт в магнитопроводе магнитный поток Ф, индуцирущий в обмотке ЭДС самоиндукции Е.
Действующие значение Е:
W – число витков в обмотке
При синусоидальном напряжении на зажимах обмотки индуцированная ЭДС тоже синусоидальная, следовательно если пренебречь потерями напряжения на обмотке, то U  E, тогда:
E, тогда:
 ,
,
S - площадь поперечного сечения магнитопровода
Bm – максимальное значение индукции
Нелинейная катушка индуктивности изображена на рис. 3. Здесь R-активное сопротивление обмотки с числом витков w; Ф-основной поток, замыкающийся по сердечнику;  -поток рассеяния, которому соответствует индуктивность рассеяния
-поток рассеяния, которому соответствует индуктивность рассеяния  и индуктивное сопротивление рассеяния
и индуктивное сопротивление рассеяния  .
.
Различают параллельную и последовательную схемы замещения катушки с ферромагнитным сердечником. Эти схемы, а также соответствующие им соотношения и векторные диаграммы
20.Трансформа́тор (от лат. transformo — преобразовывать) — это статическое электромагнитное устройство, имеющее две или более индуктивно связанные обмотки на каком-либо магнитопроводе и предназначенное для преобразования посредством электромагнитной индукции одной или нескольких систем (напряжений) переменного тока в одну или несколько других систем (напряжений), без изменения частоты. Электромагнитная схема однофазного двухобмоточного трансформатора состоит из двух обмоток (рис. 1.2), размещенных на замкнутом магнитопроводе, который выполнен из ферромагнитного материала. Применение ферромагнитного магнитопровода позволяет усилить электромагнитную связь между обмотками, т.е. уменьшить магнитное сопротивление контура, по которому проходит магнитный поток трансформатора. Первичную обмотку 1 подключают к источнику переменного тока – электрической сети с напряжением сети u1. К вторичной обмотке 2 присоединяют сопротивление нагрузки Zн.
21. Для испытания трансформатора основными являются опыт холостого хода и опыт короткого замыкания. При опыте холостого хода трансформатора (рис. 106) его вторичная обмотка разомкнута и тока в этой обмотке нет (I2 = 0), а первичная обмотка включена в сеть источника электрической энергии переменного тока. В таких условиях в первичной обмотке протекает ток холостого хода I0, который представляет собой малую величину по сравнению с номинальным током трансформатора. В трансформаторах больших мощностей ток холостого хода может достигать значений порядка 5 — 10% от номинального тока. В трансформаторах малых мощностей этот ток достигает значения 25 — 30% номинального тока. Ток холостого хода I0 создает магнитный поток в магнитопроводе трансформатора. Для возбуждения магнитного потока трансформатор потребляет реактивную мощность из сети. Активная мощность, потребляемая трансформатором при холостом ходе, расходуется на покрытие потерь мощности в магнитопроводе, вызываемых гистерезисом и вихревыми токами.
 Так как реактивная мощность при холостом ходе трансформатора значительно больше активной мощности, то коэффициент мощности (cos φ) его весьма мал и обычно равен 0,2 — 0,3.
Так как реактивная мощность при холостом ходе трансформатора значительно больше активной мощности, то коэффициент мощности (cos φ) его весьма мал и обычно равен 0,2 — 0,3.
По данным опыта холостого хода трансформатора определяется сила тока холостого хода I0, потери в стали сердечника Рст и коэффициент трансформации К.
Сила тока холостого хода I0 измеряется амперметром, включенным в цепь первичной обмотки трансформатора.
При испытании трехфазного трансформатора определяют фазный ток холостого хода.
Потери в стали сердечника Рст измеряются ваттметром, включенным в цепь первичной обмотки трансформатора.
22 В отличие от электродвигателей и ряда других приемников электрической энергии трансформаторы нормируются не по активной, а по полной мощности. Это обусловлено тем, что размеры трансформатора при заданной частоте определяются в основном двумя величинами – номинальным напряжением и номинальным током. Номинальный, то есть допустимый по нагреву ток, определяется сечением проводов обмоток трансформатора. От напряжения, приходящегося на один виток обмотки, зависит магнитный поток, а следовательно и размеры магнитопровода. Поэтому основной паспортной величиной трансформатора является его номинальная полная мощность  .
.
Преобразование электрической энергии в трансформаторе сопровождается потерями на нагрев и сердечника и обмоток. Баланс мощностей для трансформатора имеет вид:
 , (5.29)
, (5.29)
где  ,
,  - потери в меди обмоток,
- потери в меди обмоток,  - потери в стали (сердечнике) на вихревые токи и на перемагничивание сердечника (гистерезис).
- потери в стали (сердечнике) на вихревые токи и на перемагничивание сердечника (гистерезис).
Потери в стали определяются значением потока и частотой и не зависят от нагрузки, так как при неизменном напряжении на первичной обмотке и частоте амплитуда магнитного потока практически постоянна. Поэтому потери в стали являются постоянными потерями. Их можно измерить в опыте холостого хода трансформатора, т.е. они равны активной мощности, потребляемой трансформатором на холостом ходу -  .
.
Потери в меди обмоток зависят от протекающих по обмоткам токов:
 . (5.30)
. (5.30)
Из этого выражения вытекает, что потери в меди при номинальной нагрузке равны активной мощности в опыте короткого замыкания -  .
.
КПД трансформатора определяется из выражения:
Все трансформаторы промышленного производства снабжены паспортом, содержащим следующие данные:
1. Отношение номинальных напряжений U1H /U2H;
2. Номинальную кажущуюся мощность SH;
3. Ток холостого хода I10 % (10-14%);
4. Потери при холостом ходе P10;
5. Напряжение при коротком замыкании ek (7-12%);
6. Потери при коротком замыкании P1k.
С их помощью определяют коэффициент трансформации

и номинальный первичный ток

Стандартный опыт холостого хода проводится при номинальном первичном напряжении:
U10 = U1H.
Ток холостого хода в паспорте задан в процентах от номинального тока первичной стороны. Поэтому
23. Трехфазный трансформатор представляет собой соединение трех однофазных трансформаторов. Поэтому вся теория, рассмотренная для однофазного трансформатора относится и к трехфазному применительно к одной фазе. Но в трехфазных трансформаторах есть свои особенности, которые мы рассмотрим ниже.
По конструкции трехфазные трансформаторы бывают в двух основных видах.
1. трансформаторы с независимой магнитной системой (групповые), где каждая фаза трансформируется своим трансформатором, рис. 26
Групповой трансформатор
Рис. 26
2. Трансформаторы трехстержневые, где существует магнитная связь между фазами, рис. 27.
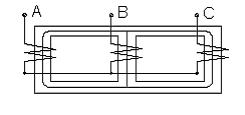
Рис. 27
Недостатки группового трансформатора:
1) занимает большую площадь;
2) большая стоимость;
3) меньше КПД.
Преимущества:
1) резерв достаточен на 1/3 установленной мощности;
2) транспортный габарит меньше чем у трехстержневого трансформатора.
Групповой трансформатор используется на большие мощности на тепловых станциях.
Трехстержневые трансформаторы используется в распределительных сетях на предприятиях.
Первая особенность.
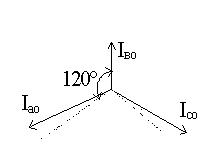 Эта особенность относится к трехстержневому трансформатору (рис.2). Поток в среднем стержне при холостом ходе проходит путь меньше, чем в крайних стержнях, а это приводит к тому, что токи в крайних стержнях на 40-50% больше, чем в среднем при симметричном потоке. Т.е. при холостом ходе токи представляют несимметричную систему. Модули не равны и угол не равен 120°, рис. 28.
Эта особенность относится к трехстержневому трансформатору (рис.2). Поток в среднем стержне при холостом ходе проходит путь меньше, чем в крайних стержнях, а это приводит к тому, что токи в крайних стержнях на 40-50% больше, чем в среднем при симметричном потоке. Т.е. при холостом ходе токи представляют несимметричную систему. Модули не равны и угол не равен 120°, рис. 28.
При нагрузке система токов по фазам принимает симметричную систему.
Рис. 28
Вторая особенность.
Связана со способом соединения обмоток. Гостом предусмотрены следующие способы соединения обмоток:  , D, Z. Обозначение фаз.
, D, Z. Обозначение фаз.
| Начало | концы | |
| Обмотка В.Н. | A, B, C | X, Y, Z |
| Обмотка Н.Н. | a, b, c | x, y, z |
При изготовлении трансформаторов, гостом предусматриваются следующие способы соединения:
1) / для мелких распределительных трансформаторов (на предприятиях);
2) /D для трансформаторов средней и большой мощности;
3)  0/D для трансформаторов большой мощности при повышенном напряжении.
0/D для трансформаторов большой мощности при повышенном напряжении.
24 Используются в цепях переменного тока для изменения значения тока и напряжения в заданное число раз с определенной точностью.
Устройство измерительных трансформаторов аналогично обычным силовым трансформаторам с той лишь разнице, что их вторичная обмотка может быть двухслойной: одна катушка используется для целей измерения, а вторая (низкой точности) – для цепей автоматической защиты. Во вторичную цепь трансформатора могут включаться не только приборы контроля (вольтметры, ваттметры, счетчики энергии и т.п.), но и элементы автоматики (элементы защиты и управления). При возникновении аварийных ситуаций в линии ток может увеличиться в десять раз, при этом трансформатор тока существенно перегружается, его мощность становится во много раз больше рабочей, что приводит к насыщению магнитопровода, снижению точности измерений. В таком режиме трансформаторы тока работают не в нормальном режиме, и для них при этом нормируется уровень 10% точности.
Измерительные трансформаторы имеют следующие эксплуатационные характеристики:
· для трансформаторов напряжения (ТН): рабочую частоту (50 Гц), номинальное напряжение (от 0,38 кВ до 750 кВ), номинальное вторичное напряжение (100 В); класс точности (0,05…3,0),
· для трансформаторов тока (ТТ): номинальный первичный ток (от 1 А до 40 кА); номинальный вторичный ток (1; 2; 2,5; 5 А); номинальная нагрузка вторичной цепи (2,5; 5; 10; 25; 30; 40; 60; 75; 100 Вт); класс точности (0,2…10,0).
Измерительные приборы и элементы защиты электрических цепей выполняют на токи и напряжения вторичных обмоток измерительных трансформаторов. Причем, вторичная обмотка измерительных трансформаторов обязательно должна быть заземлена.
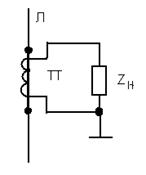
Рис. 3.4 Схема включения трансформатора тока.
Для трансформаторов тока важными метрологическими характеристиками являются: номинальное напряжение, номинальный первичный и вторичный ток, номинальный коэффициент трансформации, токовая погрешность, угловая погрешность, полная погрешность (характеризует относительный намагничивающий ток), номинальная нагрузка, номинальная предельная кратность первичного и вторичного тока.
Через трансформаторы тока в аварийных ситуациях могут протекать токи короткого замыкания, многократно превышающие номинальный ток, поэтому используют понятиядинамической и термической стойкости (кратность токов). Наиболее уязвимым элементом измерительных трансформаторов является первичная обмотка, так как в аварийных ситуациях вторичная обмотка работает в режиме насыщения магнитопровода.
Трансформаторы тока (ТТ) бывают: шинные, кабельные, проходные. В одновитковом трансформаторе тока первичная обмотка может быть выполнена в виде стержня или пакета шин.
Примером такого исполнения является одновитковый проходной трансформатор тока с литой изоляцией (на 10 кВ).
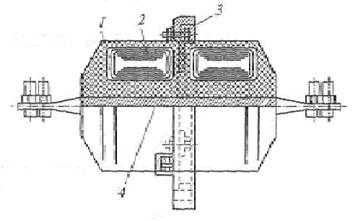
Рис. 3.5 Одновитковый трансформатор тока ТПОЛ-10, UH0M = 10 кВ:
1 – магнитопроводы; 2 — вторичная обмотка; 3— крепежное кольцо;
4 — токопровод.
Применение литой эпоксидной изоляции позволяет сильно упростить конструкцию и технологию производства трансформаторов. Достоинством одновиткового исполнения ТТ является его высокая электродинамическая стойкость. При расчете измерительных цепей необходимо производить учет сопротивления проводов измерительной схемы. Трансформаторы тока
Измерительные трансформаторы напряжения (ТН) служат для приведения напряжения к стандартному значению (100 В), на которое рассчитаны вторичные приборы. Для обеспечения безопасности обслуживающего персонала вторичная обмотка трансформатора заземляется. Рис. 3.6 Схемы включения трансформаторов напряжения в трехфазных сетях с использованием двух (а) и трех (б) однофазных трансформаторов.
Основными параметрами ТН являются: номинальные значения напряжения на обмотках, коэффициента трансформации, погрешности по напряжению, мощность трансформатора и вторичная нагрузка.
На погрешность трансформатора влияет коэффициент мощности нагрузки (cosφ). Характер нагрузки оказывает влияние также и на угловую погрешность.
До напряжений 35 кВ конструкция ТН сходна с конструкцией силовых трансформаторов. Индукция в сердечнике ТН значительно меньше, чем у силовых трансформаторов, это позволяет снизить погрешность измерений.
25 Машины постоянного тока широко используются в качестве источника постоянного тока, либо преобразователя электрической мощности в механическую. Первая машина работает в режиме генератора, вторая в режиме двигателя. Двигатели постоянного тока широко используются в регулируемом электроприводе.
Работа этих машин основана на двух законах:
1. Закон электромагнитной индукции
 ,где
,где
 - индукция,
- индукция, 
 - длина проводника,
- длина проводника, 
 - линейная скорость,
- линейная скорость, 
2. Закон электромагнитных сил:
 ,где
,где
 - сила воздействия на проводник
- сила воздействия на проводник
 - ток в проводнике,
- ток в проводнике, 
ЭДС, наводимая в проводнике, получается за счет того, что проводник пересекает магнитное поле со скоростью .
Поэтому в реальной машине должно быть две основные части:
первая часть – создает магнитный поток,
вторая часть – в которой индуктируется ЭДС.
Первая часть в машине постоянного тока неподвижна. К станине (1) крепятся шматованные полюса (2) на которых располагается обмотка возбуждения (3) (рис. 1).
Обмотка возбуждения создает магнитный поток при протекании по ней постоянного тока.
.
 Вторая часть – якорь. Якорь вращается. Представляет собой цилиндр набранный из листов электротехнической стали (4).В наружной части якоря расположены пазы, где укладываются секции обмотки (5). Каждая секция соединяется с пластинами коллектора (6). Коллектор служит для выпрямления переменной ЭДС в постоянную величину (режим генератора). Эта ЭДС снимается с помощью щеток (7), рис. 2.
Вторая часть – якорь. Якорь вращается. Представляет собой цилиндр набранный из листов электротехнической стали (4).В наружной части якоря расположены пазы, где укладываются секции обмотки (5). Каждая секция соединяется с пластинами коллектора (6). Коллектор служит для выпрямления переменной ЭДС в постоянную величину (режим генератора). Эта ЭДС снимается с помощью щеток (7), рис. 2.
Рассмотрим принцип выпрямления:
(рис. 3). Виток (8) подсоединен к двум
 кольцам и вращается в магнитном поле. При вращении витка в проводниках (1,2) будет наводиться переменная ЭДС (под северным полюсом одно направление, а под южным другое).Снятое со щеток напряжение будет иметь синусоидальный характер (рис. 3).
кольцам и вращается в магнитном поле. При вращении витка в проводниках (1,2) будет наводиться переменная ЭДС (под северным полюсом одно направление, а под южным другое).Снятое со щеток напряжение будет иметь синусоидальный характер (рис. 3).
Если кольцо разрезать пополам и подсоединить к ним проводники (1,2) то это уже будет элементарный коллектор – выпрямитель, (рис. 4).Независимо от того,
 какое полукольцо с проводником (1) или (2) подойдет к нижней щетке, направление ЭДС, снимаемое нижней щеткой, будет одним и тем же. Для внешней цепи плюс будет на нижней щетке, а минус на верхней. При одном витке выпрямленная ЭДС будет иметь большую пульсацию. При увеличении числа
какое полукольцо с проводником (1) или (2) подойдет к нижней щетке, направление ЭДС, снимаемое нижней щеткой, будет одним и тем же. Для внешней цепи плюс будет на нижней щетке, а минус на верхней. При одном витке выпрямленная ЭДС будет иметь большую пульсацию. При увеличении числа
Пульсация ЭДС характеризуется величиной –  .
.
 и зависит от числа коллекторных пластин на полюс. При одном витке (одной коллекторной пластине на полюс) пульсация составляет
и зависит от числа коллекторных пластин на полюс. При одном витке (одной коллекторной пластине на полюс) пульсация составляет  .
.
26. Схемой возбуждения называется схема питания обмотки индуктора. Схема возбуждения определяет основные свойства и характеристики машины.
По схеме возбуждения машины постоянного тока делятся на машины снезависимым возбуждением и машины с самовозбуждением.
В машине с независимым возбуждением обмотка индуктора питается от постороннего источника постоянного тока. Схема с независимым возбуждением (с электрически не связанными цепями якоря и индуктора) применяется относительно редко. Обычно у машин постоянного тока, как генераторов, так и двигателей, цепи якоря и индуктора электрически связаны. У генераторов при этом осуществляется самовозбуждение: обмотка индуктора питается током якоря той же машины.
В зависимости от схемы, по которой электрически связываются обмотки якоря и индуктора, различают три типа машин постоянного тока,имеющие в генераторном и в двигательном режиме существенно разные характеристики и соответственно разные области применения: машины с параллельным возбуждением (шунтовые); машины с последовательным возбуждением (сериесные) и машины со смешанным возбуждением (компаундные).
В машине параллельного возбуждения обмотка возбуждения соединяется параллельно с якорем (по отношению к внешней цепи), а в машине последовательного возбуждения – последовательно.Машина смешанного возбужденияимеет параллельную и последовательную обмотки возбуждения, причем обычно основной является параллельная обмотка.
Самовозбуждение в генераторах постоянного тока основано на использовании явления гистерезиса в стали полюсов индуктора.
Схема независимого возбуждения
Схема параллельного возбуждения
Схема последовательного возбуждения
27Как и в случае с асинхронными двигателями, пуск двигателей постоянного тока осложнен возникающими при пуске большими значениями пусковых токов и моментов. Но в отличие от асинхронных двигателей, в ДПТ пусковые токи превышают номинальные в 10-40 раз. Такое громадное превышение может привести к выводу двигателя из строя, повреждению связанных с двигателем механизмов и большим просадкам напряжения в сети, что может сказаться на других потребителях. Поэтому пусковые токи стараются ограничить до значений (1,5…2) Iн.
Для маломощных двигателей (до 1 кВт) при условии отсутствия нагрузки на валу, можно применить прямой пуск, то есть непосредственно от сети. Это связано с тем что масса движущихся частей двигателя не велика, а сопротивление обмотки относительно большое. При прямом пуске таких двигателей пусковые токи не превышают значений (3…5) Iн, что для таких двигателей не критично.
Когда двигатель работает при постоянном напряжении и сопротивлении обмотки якоря, ток в якоре можно найти с помощью формулы
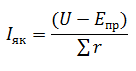
В этой формуле U – напряжение питающей сети, Епр – противоЭДС, ∑r – сопротивление обмоток якоря. ПротивоЭДС Епр возникает при вращении якоря в магнитном поле статора, при этом в двигателе, она направлена против якоря. Но когда якорь не движется, Епр не возникает, а значит, выражение для тока примет следующий вид

Это и есть выражение для определения пускового тока.
Глядя на формулу можно прийти к выводу, что снижения пускового тока возможно либо снижением напряжения, либо увеличением сопротивления якорной обмотки.
Пуск двигателя снижением напряжения применяется, если питание двигателя организовано от независимого источника энергии, который можно регулировать. На практике такой пуск используется для двигателей средней и большой мощности.
Мы рассмотрим более подробно способ пуска двигателя постоянного тока с помощью введения дополнительного сопротивления в цепь якоря. При этом пусковой ток будет равен

Таким образом, можно добиться величины пускового тока, в нужном диапазоне, безопасном для двигателя. Добавочное сопротивление может быть как в виде реостата, так и в виде нескольких резисторов. Это нужно для того, чтобы в процессе запуска двигателя, менять сопротивление в якорной цепи.
Следует знать, что с дополнительным сопротивлением в обмотке якоря двигатель работает не на естественной, а на более мягкой искусственной характеристике, которая не подходит для нормальной работы двигателя.
Пуск двигателя осуществляется в несколько ступеней. После некоторого разгона двигателя, Епр ограничит ток, а следовательно пусковой момент, чтобы поддержать его на прежнем уровне, нужно уменьшить сопротивление, то есть переключить реостат или шунтировать резистор.
Двигатели постоянного тока классифицируются в зависимости от способа соединения обмотки возбуждения с якорем:
1. Двигатель параллельного возбуждения (если напряжение обмотки возбуждения иное, то такой двигатель называется двигателем независимого возбуждения).
2. Двигатель последовательного возбуждения.
3. Двигатель смешанного возбуждения.
28. Двигатели независимого и параллельного возбуждения имеют «жесткую» естественную механическую характеристику, вследствие чего их применяют, когда требуется незначительное изменение частоты вращения при изменении нагрузки. Следует заметить, что многие из указанных двигателей снабжаются дополнительно последовательной обмоткой возбуждения, небольшая МДС которой направлена встречно по отношению к основной обмотке возбуждения. Наличие такой обмотки приводит к некоторому увеличению «жесткости» естественной механической характеристики.
Двигатели независимого и параллельного возбуждения применяются также в тех случаях, когда внешний момент может быть как тормозящим, так и движущим. В этом случае двигатель будет автоматически переходить из двигательного режима работы в тормозной генераторный или наоборот.
Двигатели последовательного возбуждения имеют «мягкую» естественную механическую характеристику, которая в некоторых случаях (например, на кранах, на электротранспорте) оказывается наиболее подходящей: при перемещении легких грузов частота вращения двигателя автоматически значительно повышается, что приводит к повышению производительности механизмов. Особенностью двигателей последовательного возбуждения является невозможность их работы вхолостую.
Двигатели смешанного возбуждения имеют более «мягкую» естественную характеристику, чем двигатели параллельного (или независимого) возбуждения, но более «жесткую», чем двигатели последовательного возбуждения. В отличие от двигателей последовательного возбуждения они могут работать вхолостую.
Двигатели смешанного и особенно последовательного возбуждения допускают большую кратковременную перегрузку по моменту по сравнению с двигателями параллельного возбуждения. Это позволяет производить их пуск и торможение в более короткое время. А при одинаковом времени они оказываются меньше загруженными по току.
Благодаря возможности использования потенциометрических схем включения все двигатели постоянною тока имеют лучшие свойства в отношении регулирования частоты вращения по сравнению с наиболее распространенными асинхронными двигателями (см. гл. 10). Когда потенциометрические схемы включения не обеспечивают необходимого диапазона регулирования частоты вращения, для двигателей с независимым возбуждением используются различные системы с регулируемым напряжением для питания обмотки якоря.
В справочной литературе приводятся следующие технические данные двигателей постоянного тока: тип двигателя; номинальная (механическая) мощность, кВт; номинальное напряжение, В; номинальная частота вращения, об/мин; номинальный ток, А; номинальный КПД; момент инерции ротора, кг•м2.
Если обмотка возбуждения выполнена на напряжение, отличающееся от напряжения обмотки якоря, дополнительно указываются номинальные напряжения и ток обмотки возбуждения.
Кроме перечисленных сведений указываются иногда и ряд других, например способ возбуждения, режим работы (см. гл. 12), допустимые кратковременные перегрузки и т. д.
29. Генераторы с самовозбуждением делят на три типа:
а) с параллельным возбуждением; б) с последовательным возбуждением; в) со смешанным возбуждением.
Генератор с параллельным возбуждением имеет такую же конструкцию обмотки возбуждения, как и генератор с независимым возбуждением. Поскольку Iя = Iн + Iв, то ток возбуждения является частью тока якоря и составляет 1¸5% Iя.ном. Характеристика холостого хода E = f(Iв) в относительных единицах практически одинакова у всех типов генераторов.
Рассмотрим процесс самовозбуждения машины при наличии остаточной намагниченности Фост основных полюсов в режиме холостого хода. При вращении якоря с частотой nном в слабом остаточном магнитном поле Фост в якоре наводится небольшая ЭДС Еост. Так как обмотка возбуждения и якорь образуют замкнутый контур, то под действием Еоств ОВ появится небольшой ток Iв, который создаст небольшой поток возбуждения Фв.
При правильной полярности включения ОВ произойдет суммирование потоков Фост + Фв = Ф. Усиленный поток Ф увеличивает ЭДС Е, которая увеличивает Iв и т. д. Процесс самовозбуждения нарастает. Ограничение роста Ф, Е, Iв происходит из-за насыщения магнитной цепи. Процесс самовозбуждения можно проиллюстрировать, добавив к характеристике холостого хода прямую 2, построенную по уравнению E = (Rя + Rр + Rв)Iв »(Rр + Rв)Iв. Ее угол наклона можно регулировать изменением сопротивления Rррегулировочного реостата. При пуске Rр выведено, т. е. Rр = 0. Тогда прямая 2 имеет минимальный угол наклона, определяемый сопротивлением Rв обмотки возбуждения. Процесс самовозбуждения показан стрелками: вначале из точки Еост – горизонтальный ход до прямой 2, далее вертикальный ход до характеристики 1, затем опять горизонтальный ход до прямой 2 и т. д. Процесс оканчивается в точке пересечения кривой 1 и прямой 2 при Е = Еmах. Это устойчивое возбуждение. Для снижения Еmах до Еном вводят реостат Rр. При этом угол a увеличивается и прямая 2 занимает положение 3. Увеличение Rр, при котором прямая 3 занимает положение 4, сделает работу генератора неустойчивой и Е может упасть до Еост. Сопротивление цепи возбуждения Rр.кр + Rв, определяющее угол aкр, называют критическим. Самовозбуждение при таком и большем сопротивлении невозможно. Итак, для самовозбуждения генератора требуются три условия: наличие остаточного потока намагничивания Фост; согласованность потоков ФвиФост; сопротивление цепи возбуждения меньше критического, а п = пном.
| . |
Обычно в магнитной системе машины имеется остаточная намагниченность из-за явления гистерезиса. Однако возможны случаи полного размагничивания полюсов. Тогда начальное намагничивание создают, пропуская через обмотку возбуждения ток от внешнего источника. Внешняя характеристика генератора имеет вид кривой 1.
30. Условия получения:
1. наличие не менее двух обмоток;
2. токи в обмотках должны отличаться по фазе
3. оси обмоток должны быть смещены в пространстве.
В трёхфазной машине при одной паре полюсов (р=1) оси обмоток должны быть смещены в пространстве на угол 120°, при двух парах полюсов (р=2) оси обмоток должны быть смещены в пространстве на угол 60° и т.д.
Рассмотрим магнитное поле, которое создаётся с помощью трёхфазной обмотки, имеющей одну пару полюсов (р=1) (рис. 5.7). Оси обмоток фаз смещены в пространстве на угол 120° и создаваемые ими магнитные индукции отдельных фаз (BA, BB, BC) смещены в пространстве тоже на угол 120°.
Магнитные индукции полей, создаваемые каждой фазой, как и напряжения, подведённые к этим фазам, являются синусоидальными и отличаются по фазе на угол 120°.
Приняв начальную фазу индукции в фазе А (φA) равной нулю, можно записать:
Магнитная индукция результирующего магнитного поля определяется векторной суммой этих трёх магнитных индукций.
 .
.
Найдём результирующую магнитную индукцию (рис. 2.8) с помощью векторных диаграмм, построив их для нескольких моментов времени.
| а) При t=0 | б) При 
| в) При 
|

| 
|
|
| 
| 
|

| 
| 
|
Асинхронная машина может работать в режимах двигателя, генератора и электромагнитного тормоза.
Режим двигателя
Этот режим служит для преобразования потребляемой из сети электрической энергии в механическую. Пусть обмотка статора создаёт магнитное поле, вращающееся с частотой n0 в указанном направлении (рис. 5.9). Это поле будет наводить согласно закону электромагнитной индукции в обмотке ротора ЭДС. Направление ЭДС определяется по правилу правой руки и показано на рисунке (силовые линии должны входить в ладонь, а большой палец нужно направить по направлению движения проводника, т.е. ротора, относительно магнитного поля). В обмотке ротора появится ток, направление которого примем совпадающим с направлением ЭДС.
В результате взаимодействия обмотки ротора с током и вращающегося магнитного поля возникает электромагнитная сила F. Направление силы определяется по правилу левой руки (силовые линии должны входить в ладонь, четыре пальца – по направлению тока в обмотке ротора). В данном режиме (рис. 5.9) электромагнитная сила создаст вращающий момент, под действием которого ротор начнёт вращаться с частотой n.
Направление вращения ротора совпадает с направлением вращения магнитного поля.
Чтобы изменить направление вращения ротора (реверсировать двигатель), нужно изменить направление вращения магнитного поля.
Для реверса двигателя нужно изменить порядок чередования фаз подведённого напряжения, т.е. переключить две фазы.
31Асинхронный двигатель – это асинхронная электрическая машина переменного тока в двигательном режиме, у которой частота вращения магнитного поля статора больше чем частота вращения ротора.
Принцип работы берет основу из создания вращающегося магнитного поля статора, о чем подробнее вы можете почитать из указанной ссылки.
Асинхронные двигатели – одни из самых распространённых электрическим машин, и зачастую являются одним из основных преобразователей электрической энергии в механическую энергию. Самым большим достоинством является отсутствие контакта между подвижными и подвижными частями ротора, я имею ввиду электрический контакт, к примеру, в двигателях постоянного тока через щетки и коллектор. Однако это справедливо только к АД с короткозамкнутым ротором, в асинхронных двигателях с фазным ротором, этот контакт имеет место, но об этом чуть позже.
Конструкция асинхронного двигателя.
Рассмотрим конструкцию, примером послужит асинхронный двигатель с короткозамкнутым ротором, но так же существует фазный тип ротора. Асинхронный двигатель состоит из статора и ротора между которыми воздушный зазор. Статор и ротор в свою очередь еще имеют так называемые активные части – обмотка возбуждения (отдельно статорная и отдельно роторная) и магнитопровод (сердечник). Все остальные детали АД, такие как: вал, подшипники, вентилятор, корпус, и т.п. – чисто конструктивные детали, обеспечивающие защиту от окружающей среды, прочность, охлаждение, возможность совершать вращение. Статор представляет собой трёх (или много)-фазную обмотку, проводники которой равномерно уложены в пазах по всей окружности, с угловым расстоянием в 120 эл. градусов. Концы обмотки статора обычно соединяют по схемам «звезда» или «треугольник», и подключаются к сети питающего напряжения. Магнитопровод выполняется из электротехнической шихтованной (набрано из тонких листов) стали.
Как я уже сказал ранее, в асинхронном двигателе существует всего 2 типа роторов: это фазный тип ротора, и короткозамкнутый. Магнитопровод ротора также выполнен из шихтованной электротехнической стали. Короткозамкнутый ротор имеет вид так называемой «беличьей клетки» из-за схожести своей конструкции на эту клетку. Состоит эта клетка из медных стержней, которые накоротко замкнуты кольцами. Стержни непосредственно вставлены в пазы сердечника ротора. Для улучшения пусковых характеристики АД с таким типом ротора, применяют специальную форму паза, это дает возможность использования эффекта вытеснения тока, что влияет на увеличение активного сопротивления роторной обмотки при пуске (больших скольжения). Сами по себе, АД с короткозамкнутым ротором имеют малый пусковой момент, что пагубно сказывается на области их использования. Наибольшее распространение они нашли в системах которые не требуют больших пусковых моментов. Однако, данный тип ротора отличается тем, что на его обслуживание тратится меньше средств чем на обслуживание двигателя с фазным ротором, вследствие отсутствия физического контакта в типе ротора беличья клетка. Фазный ротор состоит из трёхфазной обмотки, зачастую соединенной по схеме «звезда», и выведенную на контактные кольца, которые вращаются вместе с валом. Щетки выполнены из графита. Фазный ротор дает много преимуществ, таких как пуск звезда-треугольник, регулирование частоты вращения изменением сопротивления ротора.
Режимы работы
Подробнее рассмотреть механическую характеристику в моей ранней статье, а так же способы пуска с реверсом.
К тормозным режимам стоит отнести несколько основных:
– торможение противовключением;
– торможение однофазным переменным током и конденсаторное торможение;
– динамическое торможение.
Асинхронный двигатель имеет низкую стоимость, надёжен, и очень дешевый в обслуживании, особенно если он выполнен с короткозамкнутым ротором.
32. Электродвигатели переменного тока, использующие для своей работы вращающееся магнитное поле статора, являются в настоящее время весьма распространенными электрическими машинами. Те из них, у которых частота вращения ротора отличается от частоты вращения магнитного поля статора, называются асинхронными двигателями.
Очень широко применяются в различных отраслях хозяйства и производства линейные асинхронные двигатели в силу простоты их изготовления и высокой надежности. Между тем, можно выделить четыре основных типа асинхронных двигателей:
· однофазный асинхронный двигатель с короткозамкнутым ротором;
· двухфазный асинхронный двигатель с короткозамкнутым ротором;
· трехфазный асинхронный двигатель с короткозамкнутым ротором;
· трехфазный асинхронный двигатель с фазным ротором.
· При пуске вначале включается выключатель Q1. Пуск АД осуществляется в режиме ограничения тока статора за счет пускового реактора LR или пускового резистора R. После уменьшения пускового тока в процессе разгона двигателя включается выключатель Q2.
· Торможение АД с короткозамкнутым ротором осуществляют в режиме свободного выбега (отключения от сети и остановки под действием момента сопротивления холостого хода) или в режиме динамического торможения. Режим динамического торможения реализуют либо подключением двух фаз АД к сети постоянного тока (с возбуждением постоянным током), либо подключением статора АД к батарее конденсаторов, включенных в звезду или треугольник (в режиме самовозбуждения двигателя). Недостатком второго способа торможения является возникновение тормозного эффекта внутри достаточно узкого диапазона скоростей и необходимость в использовании конденсаторов большой емкости. Достоинство этого способа – реализация режима компенсации реактивной мощности питающей сети в процессе динамического торможения.
· Реверс АД осуществляют в режиме динамического торможения до нулевой скорости или, что чаще, с использованием режима противовключения.
33 Рабочими характеристиками называют графические зависимости частоты вращения п2 (или скольжения s),момента на валу М2 , тока статора I1 , коэффициента полезного действия η и cos φ1от полезной мощности Р2 при U1 = const и f1 = const. Их определяют экспериментально или путем расчета по схеме замещения или круговой диаграмме.
Примерный вид рабочих характеристик асинхронного двигателя показан на рис. 4.25. Частота вращения, ток статора, момент на валу, потребляемая и полезная мощности приведены на графике в относительных единицах. Рабочие характеристики строят только для зоны практически устойчивой работы двигателя, т. е. до скольжения (1,1 ÷ l,2)sном .Частота вращения ротора. При переходе от режима холостото хода к режиму полной нагрузки частота вращения n2 изменяется незначительно, так как при проектировании двигателей для уменьшения потерь мощности в роторе ΔРэл2 необходимо, чтобы скольжение при номинальном режиме не превышало 0,02—0,06. Следовательно, скоростная характеристика асинхронного двигателя является «жесткой».
Характеристики n2 = f(P2 ) и n2 = f(М) можно построить по круговой диаграмме. Для этого задаются рядом точек на окружности токов и находят соответствующие им значения полезной мощности, электромагнитного момента и скольжения. При расчетах, не требующих большой точности, полезную мощность Р2 принимают равной Рмех (пренебрегая потерями мощности ΔРт ), т. е. считают, что она пропорциональна отрезку AMкруговой диаграммы (см. рис. 4.17). Более точно ее определяют путем построения на круговой диаграмме специальной линии полезной мощности О"К (см. рис. 4.18,6), которую получают, соединяя точкуО" реального холостого хода с точкойК (в режимах, соответствующих точкам О и К, мощность Р2 = 0). В этом случае величина Р2пропорциональна отрезку AM, заключенному между окружностью токов и линией 0"К.
34Вращающий момент асинхронного двигателя создается при взаимодействии вращающегося магнитного поля статора с токами в проводниках обмотки ротора. Поэтому вращающий момент зависит как от магнитного потока статора Φ, так и от силы тока в обмотке ротора I2. Однако в создании вращающего момента участвует только активная мощность, потребляемая машиной из сети. Вследствие этого вращающий момент зависит не от силы тока в обмотке ротора I2, а только от его активной составляющей, т. е. I2 cos φ 2, где φ 2 — фазный угол между э. д. с. и током в обмотке ротора.
Таким образом, вращающий момент асинхронного двигателя определяется следующим выражением:
M = CΦIφ 2cos φ2, где С — конструктивная постоянная машины, зависящая от числа ее полюсов и фаз, числа витков обмотки статора, конструктивного выполнения обмотки и принятой системы единиц.
При условии постоянства приложенного напряжения и изменении нагрузки двигателя магнитный поток остается также почти постоянным. Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного моментаn=f(M). Эту характеристику (рис. 2.15) можно получить, используя зависимость M=f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.
Рис. 2.15
Так как S=(n0−n)/n0, отсюда n=n0(1−S). Напомним, что n0=(60f)/p – частота вращения магнитного поля.
Участок 1-3 соответствует устойчивой работе, участок 3-4 – неустойчивой работе. Точка 1 соответствует идеальному холостому ходу двигателя, когда n=n0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Mн и nн. Точка 3 соответствует критическому моменту Mкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Mпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1:
n0=(60f)/p,
где: p – число пар полюсов машины;
f – частота сети.
Точка 2 с координатами nн и Mн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
35 Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Оно характеризуется следующими основными показателями:
Диапазон регулирования Д (предел изменения частоты вращения). Под этой величиной понимается отношение максимальной частоты вращения двигателя пмакс к его минимальной частоте пмин :
(52)
Д = пмакс /пмин.
Плавность регулирования, которая характеризуется минимальным скачком частоты вращения двигателя при переходе с одной механической характеристики на другую.
Направление возможного изменения частоты вращения двигателя (зона регулирования). При номинальных условиях работы (напряжении и частоте питающей сети) двигатель имеет естественную механическую характеристику. При регулировании частоты вращения соответствующие им характеристики будут отличаться от естественной. Эти характеристики носят название искусственных. Таким образом, асинхронный двигатель помимо естественной может иметь множество искусственных (регулировочных) характеристик. С помощью одних методов регулирования удается получить искусственные характеристики, располагающиеся только ниже естественной. Другие методы обеспечивают регулирование частоты вращения выше и ниже естественной характеристики.
Экономичность регулирования определяется по дополнительным капитальным затратам, необходимым при создании регулировочных устройств, а также по потерям электроэнергии при регулировании.
Следует отметить, что в ряде случаев, например, для механизмов, работающих сравнительно малое время на искусственных характеристиках, потери электроэнергии даже при неэкономичных способах регулирования будут невелики (работа на низких доводочных скоростях лифтов, кранов и др.). При этом более рационально применение простых и дешевых способов регулирования частоты вращения двигателей, даже и неэкономичных с точки зрения потребления энергии.
36 Однофазные асинхронные двигатели широко применяются при небольших мощностях (до 1 — 2квт). Такой двигатель отличается от обычного трехфазного двигателя тем, что на статоре его помещается однофазная обмотка. Поэтому любой трехфазный асинхронный двигатель может быть использован в качестве однофазного. Ротор однофазного асинхронного двигателя может иметь фазную или короткозамкнутую обмотку.
Особенностью однофазных асинхронных двигателей является отсутствие начального или пускового момента, т. е. при
Дата добавления: 2016-01-30; просмотров: 3451;