Измерение параметров движения
Основными параметрами линейного (кругового) движения являются: линейное перемещение (угол поворота), линейная (угловая) скорость и линейное (угловое) ускорение. Измерение перемещения и угла поворота осуществляют с помощью преобразователей потенциометрического типа, различных электромашинных устройств, индуктивных или емкостных преобразователей.
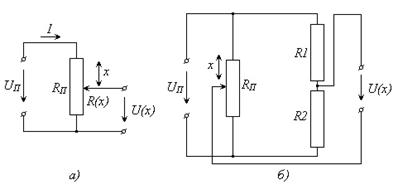
Потенциометрические преобразователи (Рис. 10.13) ли-нейного перемещения или угла поворота изготавливаются обычно с линейной зависимостью сопротивления от величины перемещения подвижного контакта. Преобразователи могут быть и с другой зависимостью, например косинусные (синусные) потенциометры, у которых
R = f(cos a), R = f(sin a),
где a - измеряемый угол поворота. Они могут использоваться в виде преобразователя «перемещение-напряжение», «угол-напряжение» (Рис. 10.13, а) или включаются в мостовую схему (Рис. 10.13, б).
|
| Рис. 10.13 – Схемы включения потенциометрических преобразователей: а) – прямое включение; б) – мостовая схема |
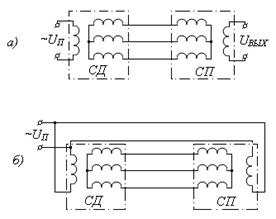
Электромашинные преобразователи (сельсины) представляют собой малогабаритные электрические машины, состоящие из статора и ротора. По сути они во многом аналогичны трехфазным машинам. На статорах располагаются три обмотки, сдвинутые в пространстве на 120 градусов по отношению друг к другу. Роторы имеют по одной обмотке (рис. 10.14, а, б). Возможны два режима работы схемы – трансформаторный и индикаторный.
В трансформаторном режиме (рис. 10.14, а) ротор одной машины (сельсин-датчика) может вращаться и соединяется с источником углового перемещения. Второй ротор (сельсин-приемника) фиксируется в неподвижном положении.
При подаче на обмотку первого ротора переменного питающего напряжения ~UП на выходах обмотки второго ротора получим выходное напряжение (~UВЫХ), пропорциональное синусу угла рассогласования роторов. При этом, если оси обмоток сдвинуты на угол p/2, то напряжение UВЫХ = 0.
В индикаторном режиме (рис. 10.14, б) ротор сельсин-приемника не фиксируется. Его обмотка подсоединяется к питающей сети. При повороте первого ротора второй также будет вращаться так, что оси их катушек будут занимать одинаковое угловое положение.
|
| Рис. 10.14 – Схемы соединения обмоток сельсин-датчика и сельсин-приемника: а) трансформаторный режим; б) индикаторный режим; СД – сельсин-датчик; СП – сельсин-приемник |
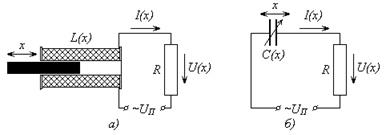
Индуктивные и емкостные преобразователи функцио-нируют на основе изменения своего параметра – индуктивности L или емкости С в зависимости от перемещения х элемента конструкции (ферромагнитного сердечника, пластины конденсатора и др.). Изменение L или С преобразуется в напряжение или ток, функционально связанный с перемещением х (рис. 10.15, а, б).
Измерение частоты вращения (угловой скорости) проводят с помощью механических, электромашинных, частотных и других преобразователей.
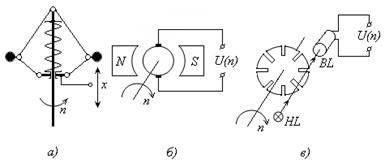
Механические преобразователи (тахометры) функцио-нируют за счет использования центробежной силы, действу-ющей на грузы, под действием которой они расходятся, перемещая муфту (рис. 10.16, а). Линейное перемещение муфты может быть преобразовано в электрический сигнал или использоваться непосредственно в процессе регулирования.
|
| Рис. 10.15 – Схемы преобразователей перемещения: а) индуктивного и б) емкостного |
Электромашинный преобразователь (тахогенератор) представляет собой миниатюрный генератор, у которого напряжение пропорционально частоте вращения якоря (рис. 10.16, б).
Частотные или импульсные преобразователи формируют последовательность электрических импульсов, частота следования которых пропорциональна скорости вращения контролируемого органа. Если используется фотоэлектрический формирователь импульсов (рис. 10.16, в), то с контролируемым объектом будет механически соединен перфорированный диск, через отверстие которого световой поток от источника HL поступает к фотоприемнику ВL.
|
| Рис. 10.16 – Примеры преобразователей частоты вращения: а) механический; б) электромашинный (тахогенератор); в) импульсный (фотоэлектрический) |
При вращении диска световой поток будет прерывистым. Количество формируемых за один оборот диска импульсов будет равно количеству отверстий или прорезей диска.
При необходимости получения информации об ускорении, используются датчики линейного или углового ускорения или, используя информационный сигнал о скорости, его дифференцируют. В качестве датчиков ускорения используются пьезоэлектрические преобразователи, тензометрические датчики и др.
Преобразование сигнала скорости в сигнал ускорения осуществляют с помощью дифференцирующих устройств, например, выполненных на базе операционного усилителя, для которых выполняется условие дифференцирования при котором
 ,
,
где k – постоянный коэффициент.
Дата добавления: 2016-01-18; просмотров: 1674;