Вращения асинхронных двигателей
В большинстве случаев для асинхронных двигателей с короткозамкнутым ротором используется пуск с помощью простых коммутирующих аппаратов – рубильников, автоматических выключателей и других устройств подобного рода. При прямом пуске двигателя кратность пускового тока высока, КП = 5,5…7. Такой кратковременный пусковой ток относительно безопасен для двигателя, но вызывает изменение напряжения в сети, что может неблагоприятно сказаться на других потребителях энергии, присоединенных к той же распределительной сети. По этим причинам номинальная мощность асинхронных двигателей, пускаемых прямым включением, зависит от мощности распределительной сети. В мощных сетях промышленных предприятий возможен прямой пуск двигателей с короткозамкнутым ротором мощностью до 1000 кВт и даже выше, но во многих случаях эта мощность не должна превышать 100 кВт.
Следует иметь в виду еще один недостаток пускового режима асинхронного двигателя с короткозамкнутой обмоткой ротора, для которого кратность пускового момента невелика (КПУСК = 1…2). При большом пусковом токе двигатель развивает относительно небольшой пусковой вращающий момент.
Улучшение пускового режима асинхронного двигателя сводится к уменьшению пускового тока, причем желательно, чтобы пусковой момент был бы возможно больше. С этой целью снижают напряжение питания обмоток статора, нормально работающих при соединении треугольником, меняют на соединение звездой. Используют конструктивные меры в самом двигателе (обмотку ротора выполняют в виде двойной беличьей клетки). Применяют также холостой пуск двигателя, когда его плавно нагружают с помощью муфты (фрикционной, электромагнитной, порошковой) после достижения определенной частоты вращения.
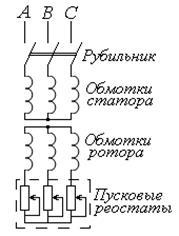
Условия пуска асинхронного двигателя с фазным ротором значительно лучше. Схема включения такого двигателя в сеть приведена на рисунке 4.5. Для получения максимального пускового вращающего момента пусковые реостаты вводят максимально. При максимальном скольжении (S ≈ 1) вращающий момент МПУСК будет иметь максимальное значение. Как только ротор начнет вращаться, скольжение станет уменьшаться, а вместе с ним ЭДС и ток ротора, что приведет к уменьшению вращающего момента. Чтобы вращающий момент нарастал, сопротивление пусковых реостатов нужно постепенно уменьшать. Когда двигатель разовьет номинальные обороты, пусковые реостаты выводят в нулевое положение, то есть замыкают накоротко.
|
| Рис.4.5 – Схема включения двигателя с фазным ротором |
Применение пусковых реостатов значительно улучшает пусковые условия асинхронного двигателя, увеличивая пусковой момент и уменьшая пусковой ток. Однако двигатель с фазным ротором дороже, его обслуживание сложнее, несколько ниже КПД и коэффициент мощности.
Для быстрой остановки двигателя или в случае использования асинхронного двигателя для торможения приводного механизма, например, при опускании груза подъемным устройством, применяется режим электромагнитного тормоза. Для перевода двигателя в этот режим применяется противовключение, то есть изменение порядка подключения к сети любых двух фаз обмотки статора. При этом направление вращения магнитного поля статора становится противоположным направлению вращения ротора и вращающий момент ротора будет направлен против внешнего механического момента (момента инерции или момента, создаваемого силой тяжести груза). Когда ротор останавливается, необходимо отключать двигатель от сети.
Для регулирования частоты вращения асинхронных двигателей с короткозамкнутым ротором используют частотное регулирование и регулирование изменением числа пар полюсов.
Частотное регулирование является наиболее перспективным методом управления частотой вращения асинхронного двигателя. Оно осуществляется путем изменения частоты f переменного тока в обмотках статора. Угловая скорость вращающегося магнитного поля статора пМ = 60 f / р пропорциональна частоте f . При этом возникает необходимость одновременно регулировать напряжение. Это связано с тем, что для сохранения постоянного вращающего момента двигателя необходимо выдерживать постоянство отношения U 2/f 2. В то же время мощность двигателя РВЫХ будет изменяться пропорционально частоте тока f.
Регулирование изменением числа пар полюсов осуществляется путем переключения числа пар р полюсов магнитного поля статора. При этом на статоре помещают две или больше независимых обмоток с разным числом пар полюсов: р1, р2 и так далее. Числа пар полюсов взаимно никак не связаны и могут быть любыми. Само регулирование сводится к скачкообразному изменению частоты пМ . Такой метод требует усложнения конструкции двигателя.
В трехфазных асинхронных двигателях с фазным ротором применяется реостатное регулирование частоты вращения. Данный метод осуществляется путем введения в цепь фазных обмоток ротора трехфазного регулирующего реостата, как и при пуске (Рис.4.5). Однако регулирующий реостат должен быть рассчитан на нагрузку, значительно большую чем при пуске.
Дата добавления: 2016-01-18; просмотров: 1248;