Интерфейсы измерительных информационных систем
Интерфейс ИИС – это совокупность цепей, объединяющих различные устройства и алгоритмы, определяющая порядок передачи информации между этими устройствами. Цепи интерфейса разделяют на три группы: информационные, адресные и управляющие, обеспечивающие информационную, электрическую и конструктивную совместимость.
Различают программные и физические интерфейсы. Информация передается в виде кодов определенного числа или словами. Для различия байтов данных, команд и адресов используются осведомительные сигналы. Для инициирования передач, синхронизации работы устройств и завершения передачи служат управляющие сигналы.
Основной характеристикой интерфейса является скорость передачи
информации, которая зависит от алгоритма передачи и технических
характеристик цепей связи. С целью модульного принципа построения
систем разработаны стандартные интерфейсы, обеспечивающие
информационную, электрическую и конструктивную совместимость
различных устройств.
Структуры интерфейсов бывают одно-, двух- и более ступенчатыми с возможными вариантами исполнения: цепочная, радиальная, магистральная и радиально-магистральная, каждая из которых может быть с централизованным или децентрализованным управлением (рис. 4.1)
Обмен информацией может быть осуществлен синхронным и асинхронным методами. Синхронная передача и прием сигналов производится в фиксированные моменты времени, темп обмена информацией при асинхронном методе определяется сигналом квитирования. Этот метод особенно эффективен при обмене информацией с различным быстродействием функциональных блоков. В ИИС используются интерфейсы первого поколения такие, как КАМАК и приборный (ГОСТ 26.003-80, IЕЕЕ-488, МЭК 625.1, GPIB), которые сменяются интерфейсами второго поколения.
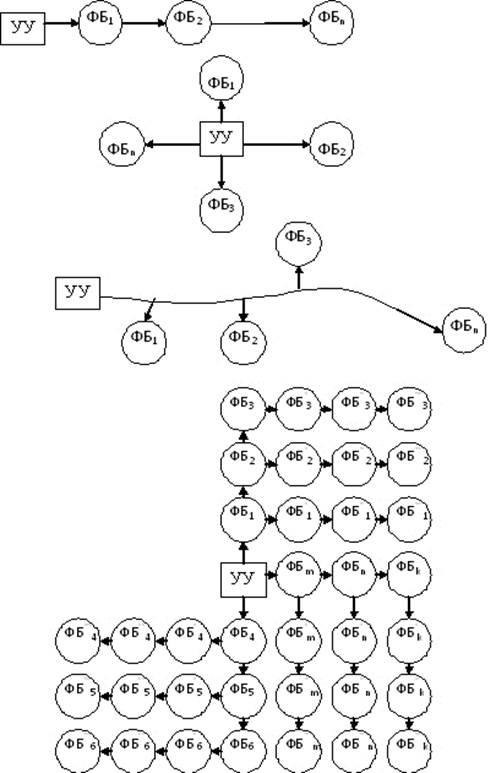
Рис. 4.1. Основные структуры интерфейсов
а) цепочечная; б) радиальная; в) магистральная; г) радиально-магистральная
Интерфейс GPIB предназначен для объединения в единую измерительную систему серийно выпускаемых цифровых приборов (мультиметров, частотомеров, осциллографов и т.п.) и компьютеров. В качестве объединительной информационной магистрали используется специальный гибкий кабель. На рис. 4.2 показана система, собранная с использованием приборного интерфейса.
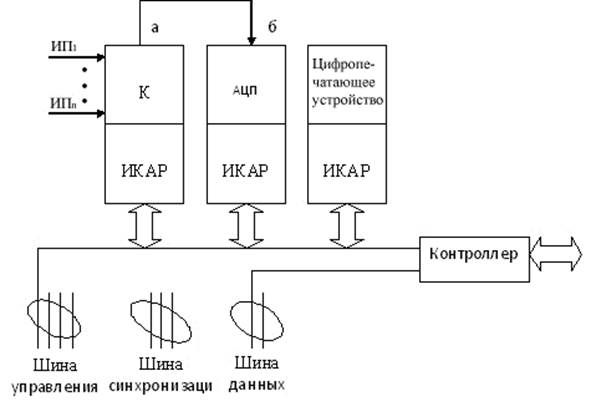
Рис. 4.2. Приборный интерфейс
а) выход коммутатора; б) вход (аналоговый) АЦП ИКАР – интерфейсные карты
В соответствии с ГОСТ 26.003-80 соединение программируемых и непрограммируемых электронных измерительных устройств, применяемых в лабораториях или промышленных условиях, должно осуществляться через параллельный интерфейс периферийных устройств – многопроводный магистральных канал общего пользования (КОП), схема подключения и структура которого приведены на рис. 4.2
Приборный интерфейс предназначен для организации взаимодействия (рис. 4.2) программируемых и непрограммируемых приборов и построения на их основе измерительных информационных систем. Соединение приборов осуществляется через многопроводный магистральный канал общего пользования (КОП) длиной не более 20 м. Число приборов подключаемых к магистрали не должно превышать 15. Обмен информацией между приборами происходит под управлением контроллера. Всего регламентируется 10 интерфейсных функций. Каждая функция позволяет прибору выполнять прем, передачу и определенную обработку сообщений. Функции могут быть реализованы как программно, так и аппаратно. Общее число адресов преемников и источников информации в системе не должно превышать 31 при однобайтовой и 961 при двухбайтовой адресации. Максимальная скорость передачи информации КОП – 106 байт/с.
 Для функционирования системы на базе приборного интерфейса GPIB необходимо в каждом приборе иметь интерфейсные карты, реализующие одну или несколько приборных функций (источник, приемник, контроллер), характерных для данного прибора. В компьютере должна стоять плата, выполняющая все эти функции, так как компьютер работает как управляющее устройство и должен выполнять все операции. В настоящее время практически все зарубежные и отечественные цифровые измерительные приборы могут поставляться с такими картами, поэтому при выборе и заказе приборов для ИИС необходимо оговаривать наличие интерфейса GPIB для зарубежных и КОП для отечественных изделий.
Для функционирования системы на базе приборного интерфейса GPIB необходимо в каждом приборе иметь интерфейсные карты, реализующие одну или несколько приборных функций (источник, приемник, контроллер), характерных для данного прибора. В компьютере должна стоять плата, выполняющая все эти функции, так как компьютер работает как управляющее устройство и должен выполнять все операции. В настоящее время практически все зарубежные и отечественные цифровые измерительные приборы могут поставляться с такими картами, поэтому при выборе и заказе приборов для ИИС необходимо оговаривать наличие интерфейса GPIB для зарубежных и КОП для отечественных изделий.
Интерфейсные платы GPIB для компьютеров, поддерживаемые современными программными пакетами, выпускаются в основном двумя фирмами: «Hewlett-Packard» (HP) и «National Instruments». В табл. 4.5 приведены некоторые типы и характеристики интерфейсных карт GPIB для персональных настольных и портативных компьютеров.
Таблица 4.5
| Тип шины | Тип платы | Технология Plug&Play | Максимальная скорость по IЕЕЕ-488.1 | Максимальная скорость по HS488 | Программное обеспечение |
| ISA, PCMCIA | AT-GPIBHTsIT (NI) | Heт | 1,5 Мбайт/с | 1,6 Мбайт/с | DOS. Windows |
| ISA, PCMCIA | HP 82335 В (HР) | Нет | 355 Кбайт/с | — | DOS. Windows |
| PCI | PCI GPIB (NI) | Да | 1,5 Мбайт/с | 7,7 Мбайт/с | Windows NT/95 |
| PCI | HP 82350 A (HP) | Нет | 750 Кбайт/с | — | Windows NT/95 |
| PC Ethernet | GPIB-ENET(NI) | — | 50 Кбайт/с | — | Windows NT/95/3/1 |
| LAN/HP-IB | HP E2050A (HP) | — | 50 Кбайт/с | — | HP-UX, Windows NT/95 |
При выборе платы следует учитывать индивидуальные характеристики шины, используемой в Вашем компьютере, и требования к параметрам системы в целом и согласовывать их с параметрами интерфейсной платы. Не имеет смысла использовать более дорогие платы, обеспечивающие высокую скорость обмена, если в системе нет высокоскоростных источников сигналов.
Примерами наиболее распространенных последовательных интерфейсов периферийных устройств могут служить интерфейсы RS-232C, RS-423, RS-422. В основе интерфейсов RS-232C, RS-422 лежит однопроводная несогласованная линия (рис. 4.3), по которой информация передается двуполярными посылками со скоростью до 20 КБод (RS-232C) и 300 КБод (RS-423) при длине линии не более 15 и 600 м соответственно. В однопроводной линии для передачи сигнала используется один провод, напряжение на котором сравнивается в приемнике с напряжением линии «общая земля», общей для всех прочих сигнальных проводников. Этот способ построения линии наиболее прост, но имеет существенный недостаток: на информационный сигнал накладываются помехи в линии. Так как помехи в линии пропорциональны длине линии связи и ширине полосы рабочих частот, то в интерфейсах RS-232C и RS-423 наложены ограничения на оба параметра (табл. 4.6)
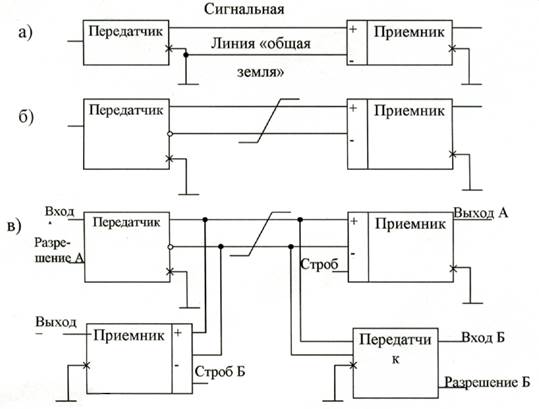
Рис. 4.3. Схемы однопроводной несогласованной (а) и симметричных дифференциальных последовательных линий связи с симплексным (б) и полудуплексным (в) режимами передачи информации
Таблица 4.6
| Технические характеристики | Интерфейс | ||||
| КОП (ГОСТ 26.003-80) | RS-232 | RS-423 | RS-422 | MIL-STD- | |
| Скорость передачи информации, Кбод | 8-103 | 104 | |||
| Длина магистрали | |||||
| Число линий интерфейса | |||||
| Продолжение табл. 4.6 | |||||
| Способ обмена информацией | Параллельный | Последовательный | Последовательный | Последовательный | Последовательный |
| Режим обмена | Полудуплексный | Симплексный | Симплексный | Полудуплексный, симплексный | Симплексный, полудуплексный, мультиплексный |
| Число подключаемых периферийных устройств | 1(10) |
Таблица 4.7
| Технические характеристики | Интерфейс | ||
| RS-232 | RS-423 | RS-422 | |
| Линия | Однопроводная, несогласованная | Однопроводная, несогласованная | Дифференциальная, согласованная |
| Максимальная длина линии, м | |||
| Максимальная скорость передачи информации, КБод | (при 12 м) | 104 (при 12 м) | |
| Выходное напряжение передатчика при работе на нагрузку, В | От ±5 до ±15 при Rн=3/7 кОм | ±3,6 | ±2,0 |
| Скорость нарастания сигнала на выходе передатчика, В/мкс | <30 | Зависит от длины кабеля и частоты переключения | Не ограничена |
| Продолжение табл. 4.7 | |||
| Выходное сопротивление приемника, кОм | 3-7 | ≥4 | ≥4 |
| Максимальное значение порогового напряжения приемника, В | ±3 | ±0,2 | ±0,2 |
| Максимально допустимое входное напряжение приемника, В | ±25 | ±12 | ±12 |
Например, в интерфейсе RS-423 при скорости передачи информации 3 КБод длина линии может достигать 1200 м, а при скорости 300 КБод – всего лишь 12 м. Кроме того, для уменьшения взаимных помех скорость нарастания фронтов передаваемых сигналов ограничивается до 30 В/мкс.
Интерфейс RS-422 распространяется на симметричные дифференциальные линии (витая пара, радиочастотный кабель), обладающие более высокими характеристиками, чем однопроводные линии. В частности по линии интерфейса RS-422 возможна передача информации со скоростью до 100 КБод на расстояние до 1200 м и со скоростью 10 МБод на расстояние до 12 м. Дифференциальный режим (рис. 4.3.б) достигается применением дифференциального передатчика, согласованной линии связи (в виде витой пары или радиочастотного кабеля) и дифференциального приемника. Сигнал передатчика появляется на входе приемника в виде разностного напряжения, тогда как помехи в линии остаются синфазными. Благодаря этому дифференциальный приемник с достаточным диапазоном подавления синфазной составляющей может отличать сигнал от помехи. К тому же интерфейс RS-422 позволяет наряду с симплексным режимом передачи (рис. 4.3.б)организовать полудуплексный режим передачи (рис. 4.3.в)и мультиплексный режим последовательной передачи информации. В последнем случае, применяемом для связи между периферийными устройствами микропроцессорных систем, для передачи информации в одном направлении используются две дифференциальные симметричные линии связи, например витые пары. В исходящем направлении включены один передатчик и приемников. Такой режим позволяет обслуживать до 12 абонентов. Основные трудности заключаются в обеспечении хорошего заземления системы. Основные параметры последовательных интерфейсов периферийных устройств приведены в табл. 4.7
Говоря о внешнем интерфейсе периферийных устройств, в частности о последовательном интерфейсе в широком смысле слова, обычно под термином «интерфейс» понимают не только функциональное назначение линии связи и электрические параметры передаваемых сигналов, но и состав аппаратуры, используемый для реализации связи между рядом периферийных устройств с помощью последовательной линии связи, принципы организации обмена информации, язык обмена информацией, организацию контроля передачи информации. При этом в общем случае различают несколько уровней интерфейса, часть которых реализуется аппаратно, а часть – программно.
Состав аппаратуры для физической реализации внешнего последовательного интерфейса периферийных устройств включает (рис. 4.4) собственно линию последовательной передачи информации (одиночный проводник, витая пара, радиочастотный кабель, волоконно-оптический кабель) и контроллеры устройств, которые предназначены для управления обменом информацией, осуществления сопряжения с линией передачи информации, осуществления контроля за передачей информации, состоянием устройств, участвующих в связи, самоконтроля. На рис. 4.4 ПУi и КПУi – iпериферийное устройство и его контроллер для связи с внешним последовательным интерфейсом; микро-ЭВМ и К-центральная микро-ЭВМ ИУВС и ее контроллер для связи с внешним интерфейсом:
МИi и МИ1 – магистральный (внутримашинный) интерфейс периферийного устройства и микро-ЭВМ соответственно.
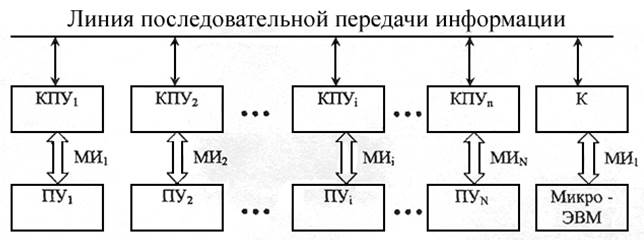
Рис. 4.4. Структура внешнего последовательного интерфейса
Обмен информацией осуществляется в большинстве случаев передачей сообщений, состоящих из командных, информационных и ответных слов. При этом используется определенный язык передачи этих слов. Типичное слово синхронного протокола с битовой организацией содержит начальный флаг, адресное, управляющее и информационные поля, проверочную последовательность слова и завершающий флаг.
Для передачи слов с битовой организацией широкое применение находят код без возвращения к нулю, код без возвращения к нулю с инверсией, код Манчестер II.
Код без возвращения к нулю (рис.4.5.а) отображает последовательность двоичных битов последовательностью уровней напряжения, постоянных на интервале передаваемого двоичного разряда.
В коде без возвращения к нулю с инверсией «1» передается отсутствием изменения уровня предшествующего бита, а «0» – инверсией этого уровня (рис.4.5.а). Таким образом, «1» и «0» в этом коде могут быть представлены в одной последовательности как низким, так и высоким уровнями напряжения, причем длинная последовательность «1» образует постоянный уровень, а длинная последовательность «0» – биполярный периодический сигнал.
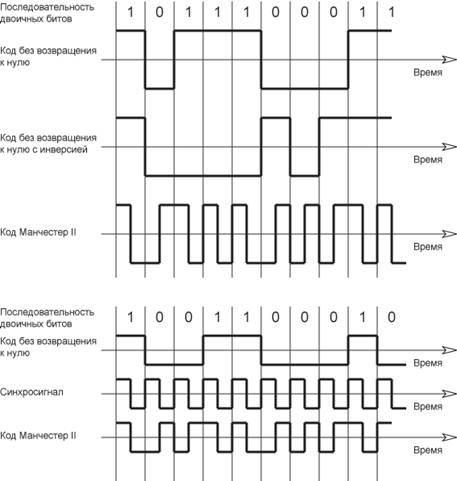
Рис. 4.5. Примеры кодов передачи информации
Код Манчестер II отображает каждый бит двоичной последовательности переходом уровней: если низкий уровень сменяется высоким, то передается «О», если высокий уровень сменяется низким – «1». Переходы имеют место в середине временного интервала, отведенного каждому двоичному биту (рис.4.5.а). Код Манчестер II легко получается из кода без восстановления нуля, если последний подать на один вход схемы логической равнозначности, на второй вход которой поступает синхросигнал в виде меандра с периодом, равным периоду кода без возвращения к нулю, и синфазный с ним (рис. 4.5.б). Код Манчестер II, в частности, применен в интерфейсе стандарта MIL-STD-1553, используемом при создании бортовой самолетной локальной сети. Он обладает большей помехозащищенностью по сравнению с кодом без возвращения к нулю, поскольку, во-первых, занимает полосу частот от половины до полного значения тактовой частоты, в то время как код без возвращения к нулю – от постоянной составляющей до половины тактовой частоты (отсутствие постоянной составляющей при кодировании по коду Манчестер II позволяет использовать более простые полосовые усилители переменного тока, применять подавление низкочастотных шумов); во-вторых, использование кода Манчестер II дает возможность обнаружения ошибки в каждом передаваемом разряде, если использовать ту особенность, что информационный переход имеет место в середине интервала, соответствующего биту. Поскольку присутствие высокого уровня или низкого уровня в течение всего интервала бита недопустимо, появление таких ситуаций может свидетельствовать о наличии ошибок. Декодирование «0» («1») при передаче «1» («0») в манчестерском коде может произойти только тогда, когда из-за помехи инверсия логических уровней будет иметь место в каждой половине интервала одного бита, однако вероятность одновременной инверсий фазы в пределах одного бита невелика.
Применение кода Манчестер II, наконец, позволяет уменьшить стоимость линии за счет исключения провода для передачи тактовых импульсов в интерфейсе, поскольку информационная последовательность в коде Манчестер II содержит в себе как тактовые, так и информационные сигналы. Более того, при применении кода без возвращения к нулю не исключено возникновение фазовых сдвигов между информационными и синхронизирующими последовательностями. Обладая свойством самосинхронизации, код Манчестер II позволяет обойти эти проблемы.
Дата добавления: 2016-01-03; просмотров: 5675;