6 страница. В МА наиболее распространены следующие типы регуляторов скоростей:
В МА наиболее распространены следующие типы регуляторов скоростей:
Центробежные, инерционные, тахорегуляторы.
Более подробно рассмотрим работу машины с ц.б. регулятором.
Схема МА с центробежным регулятором скорости
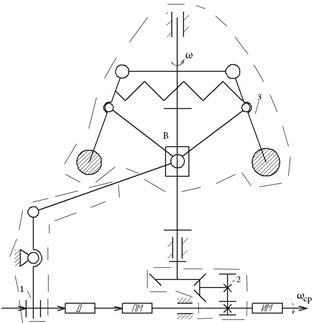
| Работа регулятора |
Изменения угловой скорости соответствует интервалам [t1;t2] ; [t3;t4] и характеризует динамику работы регулятора.
Для составления уравнения движения динамической модели машина с регулятором (для машин с 1 степенью свободы это нелинейное дифференциальное уравнение 3 порядка ) необходимы конкретные технические данные машины.
Поэтому динамика движения машины с САР обычно используется в спецкурсах. Однако для успешной работы машины с САР необходимо выбрать основные физико-геометрические параметры регулятора так, чтобы он двигался в соответствии с вышесказанным. Для этого необходимо рассмотреть более простую задачу – кинетостатика регулятора т.е. его равновесное состояние при некоторой постоянной угловой скорости.
Кинетостатика Ц.Б. регулятора (регулятор как бы неподвижен ω = const)
Регулятор симметричен поэтому будем рассматривать только его половину
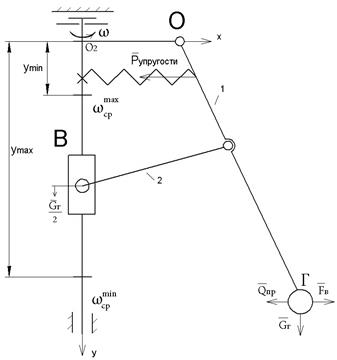
| На груз действуют |

| |
| Fи = - mгaг = - mг r ω2 = f1(r) | |
| -центробежная сила | |
| Qпр = f (Pупр, G, Gмуфты) = f2(r) | |
| -характеристика регулятора | |
| 1. При Fи = Qпр → r = const | |
| 2. При Fи < Qпр → r ↑ (увеличивается) | |
| 3. При Fи > Qпр → r ↓ (уменьшается) |
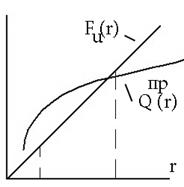
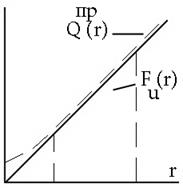
В зависимости от физико-геометрических размеров регулятора зависимость Qпр по отношению к Fи может иметь 3 характера:

| 
| 
|
| Устойчивая хар-ка регулятора | Неустойчивая хар-ка регулятора | Астатическая хар-ка на всем промежутке уравновешена |
Признак устойчивости должен выполняться во всех диаграммах изменения скоростей ωmin≤ ω ≤ ωmax и проектируемой Ц.Б. регулятора
Дата добавления: 2015-12-22; просмотров: 641;