5 страница. Где Ei – кинетическая энергия i-го звена машины
Где Ei – кинетическая энергия i-го звена машины. В общем случае звено совершает плоскопараллельное движение, поэтому
 (3)
(3)
Первое слагаемое определяет кинетическую энергию звена в поступательном и второе во вращательном движении относительно полюса, в выражении (3) за полюс выбран центр тяжести i-го звена Si , так как в этом случае просто определить момент инерции звена Jsi , а mi, vsi, ωi - соответствующая масса, скорость полюса, абсолютная угловая скорость i-го звена. Подставляя соотношения (2), (3) в (1) получим:
 (4)
(4)
Из (4) следует, что Jпр является только функцией положения при постоянных mi и Jsi . Аналогично для второй модели получим, учитывая что 
 (5)
(5)
Приведенные силовые параметры (  ) находятся из условия равенства элементарных работ совершаемых приведенными силовыми параметрами и внешними силами и моментами, действующими на звенья агрегаты:
) находятся из условия равенства элементарных работ совершаемых приведенными силовыми параметрами и внешними силами и моментами, действующими на звенья агрегаты:
dАпр = dАрн (6)
Для 1-ой модели:
 ;
;  (7)
(7)
Для машин в общем случае удобнее оперировать не с работой, а с мощностью (как отмечалось уже ранее), поэтому поделим (7) на dt и получим
 (8)
(8)
Мощность Ni, развиваемую силами приложенными к i-му звену, представим
 (9)
(9)
Где Pi – сила, действующая на i-е звено, vi – скорость точки приложения силы Pi, αi – угол между ними; Mi – момент сил, действующий на i-е звено. Подставляя (7), (8), (9) в (6) находим
В общем случае из (10) следует, что Mпр является функцией положения (φ) и Pi и Mi , которые, в свою очередь, являются функциями t; φ; ω т.е. Мпр=f(φ,ω,t)
Аналогично получим приведенную движущую силу или силу сопротивления
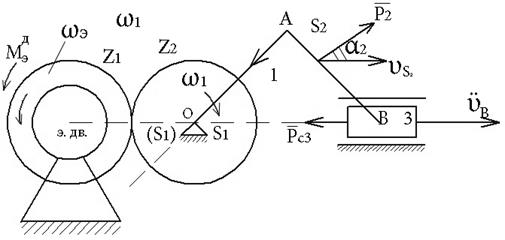
В качестве примера рассмотрим простейший машинный агрегат , где за звено приведения примем кривошип 1, учитывая (4) получим:
|
 , где
, где
Jэд, Jz1, Jz2, Js1, Js2 – моменты инерции ротора эд.дв., зубчатых колес z1, z2,
Звенья 1,2 относит. Центров тяжести; m2,m3 – массы 2,3 звеньев, точка S1 совпадает с O
Учитывая (10) имеем:
(движущих сил) 
сил сопротивления

Основные формы уравнений движения и их анализ
Положим, что МА представлен в виде 1-ой динамической модели. Для вывода уравнений движения зв. Пр. можно воспользоваться уравнением Лагранжа 2 рода или теоремой об изменении кинетической энергии механической системы
Во втором случае будут более простые выкладки
 (11)
(11)
Где Ei, Ei+1 - кинетическая энергия системы в положении i и (i+1)
∆A - работа внешних сил на перемещение при изменении положения системы от i к (i+1). В зависимости от конкретного представления E и ∆A различают две формы уравнений движения интегральную и дифференциальную
Для интегральной формы:
 (12)
(12)
Подставляя (12) в (11) получим интегральную форму уравнения движения МА при моделировании его кривошипом
 (13)
(13)
Где интегралы означают, соответственно, работу (приведенную) движущих сил и сил сопротивления.
Для дифференциальной формы:
| (14) |

|
Подставляя (14) в (11) и дифференцируя его по φ получим два вида дифференциальных уравнений движения МА при моделировании его кривошипом
 (15)
(15)
Или учтя, что 
 (16)
(16)
Если мы моделируем МА второй моделью то в уравнениях (13), (15), (16) следует заменить J на m, а M на P.
Уравнение движения в интегральной форме используют, как правило, когда приведенная функция Jпр,  ,
,  в графическом виде. При этом интегрировании уравнения также ведется один из графических методов
в графическом виде. При этом интегрировании уравнения также ведется один из графических методов
Уравнение движения в дифференциальной форме используется при задании приведенной функций (Jпр, , ) в аналитическом виде. Интегрирование уравнения осуществляется при помощи одного из численных методов решения (интегрирования) нелинейных дифференциальных уравнений на ЭВМ.
Методы решения уравнений движения МА.
В зависимости от формы задания приведенных функций (графической или аналитической) и аргументов от которых зависят эти функции, для решения дифференциальных уравнений движения используются различные методы.
Если приведенные силовые функции  или
или  зависят только от положения и заданы в графическом виде то для решения широко используют графический метод Виттенбауэра (метод с использованием диаграмм энергомасс ) в различных модификациях. Такая задача характерна при исследовании движения различного рода гидромашин, пневмоустройств и т.п.Если приведенные силовые функции зависят не только от положения, но и от угловой скорости и заданы в графическом виде, что характерно для многих машин с электродвигателем, то в расчетной практике используют графоаналитический метод Виттенбауэра в различных модификациях.
зависят только от положения и заданы в графическом виде то для решения широко используют графический метод Виттенбауэра (метод с использованием диаграмм энергомасс ) в различных модификациях. Такая задача характерна при исследовании движения различного рода гидромашин, пневмоустройств и т.п.Если приведенные силовые функции зависят не только от положения, но и от угловой скорости и заданы в графическом виде, что характерно для многих машин с электродвигателем, то в расчетной практике используют графоаналитический метод Виттенбауэра в различных модификациях.
Из аналитических методов, которые пригодны при любой форме и законе задания приведенных силовых функций наиболее широкое применение имеют метод конечных разностей (предложен Барановым) и метод Рунге-Кутта в различных модификациях.
Рассмотрим некоторые из них.
Метод Виттенбауэра (диаграммы энергомасс )
Сущность его состоит в следующем:
Предположим задано уравнение движения звена приведения соверщающего вращательное движение, в интегральной форме в виде

=>
 (17)
(17)
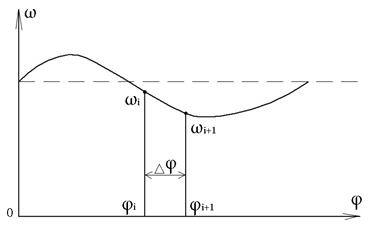
Построив график зависимости  на основании (17) можно найти угловую скорость входного звена машины ωi в каждом i-ом положении, т.е. закон движения ωi = f(φi). Такой график получил название диаграммы энергомасс или Виттенбаэура. (аналогично можно сделать и для звена совершающего поступательное движение). Поскольку, как выше отмечалось, в данном случае
на основании (17) можно найти угловую скорость входного звена машины ωi в каждом i-ом положении, т.е. закон движения ωi = f(φi). Такой график получил название диаграммы энергомасс или Виттенбаэура. (аналогично можно сделать и для звена совершающего поступательное движение). Поскольку, как выше отмечалось, в данном случае  и
и  – функции только положения, то построить диаграмму достаточно просто. Рассмотрим как это делается на примере 1-ой модели.
– функции только положения, то построить диаграмму достаточно просто. Рассмотрим как это делается на примере 1-ой модели.
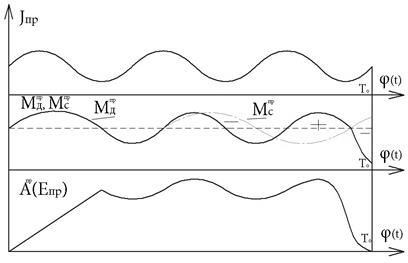
Пусть ;  ; заданы в виде графиков, где To – время работы машины. Интегрируя графики и можно определить соответствующие работы
; заданы в виде графиков, где To – время работы машины. Интегрируя графики и можно определить соответствующие работы  ;
;  . Работа определяется по графику (в) , либо
. Работа определяется по графику (в) , либо
|
В соответствии с теоремой об изменении кинетической энергии зависимость  f(φ) численно равна изменению кинетической энергии Eпр = f(φ).
f(φ) численно равна изменению кинетической энергии Eпр = f(φ).
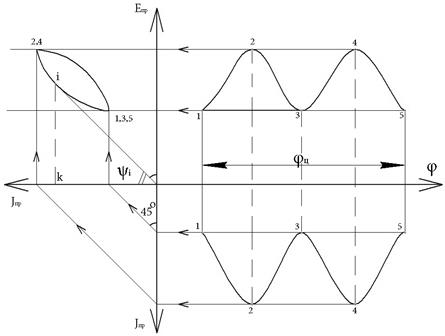
Исключая независимую величину φ из графиков Jпр = f(φ) и Eпр = f(φ)
Строим диаграмму энергомасс (для простоты выполнения для одного цикла)
работы машины φц
| kφ = ….  kE = ….
kE = ….  kJ = ….
kJ = …. 
|
Возьмем произвольную точку i на диаграмме и соединим с началом координат. Определим tgψi
tgψi =  (18)
(18)
Выразив из (18)  подставим в (17) получим
подставим в (17) получим
 или
или  (19)
(19)
С помощью (19) и диаграммы энергомасс найдем искомую функцию ω = f(φ). Положим она выглядит таким образом:
 подставим в верхнее и получим:
подставим в верхнее и получим:

|
Нас интересует зависимость φ = f(t). Для ее определения воспользуемся приближенной формулой полученной таким образом:
подставим в верхнюю формулу
(20)
Зная зависимость φ = f(t) дифференцируя, легко получим 
Метод конечных разностей (метод Баранова)
При использовании этого метода исходное дифференциальное уравнение движения звена приведения (см. ур-е (15)) преобразуется к разностному уравнению следующим образом:
| (21) |
|
Подставляя значения  ;
;  из (21) в уравнение (15) и преобразовывая ее получим следующую формулу:
из (21) в уравнение (15) и преобразовывая ее получим следующую формулу:
 (22)
(22)
При помощи (22) найдем закон движения входного звена т.к. функцию ωi =f(φi) а при помощи (20) и (21) – функции φ(t) и в(φ)
2 Неравномерность движения машинного агрегата
Постановка задачи
Анализ уравнения движения МА в дифференцируемой форме показывает, что в режиме установившегося движения практически невозможно обеспечить постоянства скорости движения ведущего звена из за необходимости выполнения в каждый момент времени двух условий :
1) равенства приведенных моментов движущих сил и сил сопротивления
2) постоянства приведенного момента инерции МА.
Действительно если  и Jпр = const то уравнение (16) будет иметь вид
и Jпр = const то уравнение (16) будет иметь вид
 (1)
(1)
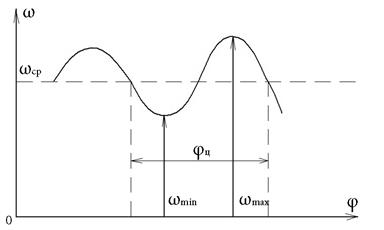
В реальных условиях эти два условия не выполняются, поэтому закон изменения угловой скорости ведущего звена в режиме установившегося движения обычно имеет вид какой то периодической функции с периодом φц где ω периодически изменяется относительно постоянной ωср которая является желательной для данного технологического процесса
|
Изменение реальной скорости относительно в цикле характеризуются коэффициентом неравномерности хода б
 (2)
(2)
Очевидно, что чем меньше б тем ближе функция ω(φ) к ωср = const и тем лучше выполняются условия технологических процессов и динамики движения МА. На практике принято, в зависимости от класса машин, ограничивать реальной некоторым предельным значением [б] так, чтобы в режиме установившегося движения обязательно выполнялось условие
б ≤ [б] (3)
Для реальных машин [б] изменяется в пределах 0.001-0.1 например, для самолетных двигателей [б] = 0.001; для сельхозтехмашин [б] = 0.1
Как при проектировании реальных машин обеспечить вышеупомянутое условие? Для этого воспользуемся теоремой об изменении кинетической энергии механической системы на интервале ωϵ[ωmin; ωmax]
Имеем:
∆A = ∆E ≈  (4)
(4)
Это выражение справедливо при условии  ≈ const которое допустимо т.к. обычно интервал [ωmin, ωmax] достаточно мал. Поэтому можно принять также следующее допущение:
≈ const которое допустимо т.к. обычно интервал [ωmin, ωmax] достаточно мал. Поэтому можно принять также следующее допущение:
ωcр =  (5)
(5)
Преобразуем (4)
 (6)
(6)
Подставим в (6) , (2) и (5) получим
б  (7)
(7)
Из (7) следует что для умножения б необходимо увеличивать  так как в реальной машине ∆E и ωср постоянны в цикле
так как в реальной машине ∆E и ωср постоянны в цикле
Поэтому определение дополнительного приведенного момента инерции  машинного агрегата и является главной задачей в изучении неравномерности движения МА в режиме установившегося движения. Этот дополнительный приведенный момент инерции называется приведенный момент инерции маховых масс или маховика, а его конструктивное оформление – маховик
машинного агрегата и является главной задачей в изучении неравномерности движения МА в режиме установившегося движения. Этот дополнительный приведенный момент инерции называется приведенный момент инерции маховых масс или маховика, а его конструктивное оформление – маховик
Методы расчета маховых масс
Определение маховых масс с помощью диаграммы энергомасс.
Это графоаналитический метод и используется тогда, когда  ;
;  и
и  – существенно переменная величина.
– существенно переменная величина.
Положим что имеется диаграмма энергомасс, построенная для цикла. Известно, что с ее помощью можно определить угловую скорость звена приведения в i-й момент времени с помощью зависимости

| 


|
При решении задачи нам известны [б] и ωср, кроме того выполняется условие (3). Из (2) и (5) выразим значения ωmax и ωmin звена приведения на цикле через известные [б] и ωср. Получим:
ωmax = ωср (1+  ) ; ωmin = ωср (1- ) (8)
) ; ωmin = ωср (1- ) (8)
Знаем: б =  (a) ωср =
(a) ωср =  (б)
(б)
ωmax = ωmin + ωср ∙ [б] из (б) ωmin = 2 ωср - ωmax тогда
ωmax = 2 ωср - ωmax + ωср ∙ [б] => 2 ωmax = 2 ωср + ωср ∙ [б]
| ωmax = ωср (1+ )
|
ωmin = ωmax - ωср ∙ [б] из (б) ωmax = 2 ωср - ωmin тогда
ωmin = 2 ωср – ωmin - ωср ∙ [б] => 2 ωmin = 2 ωср - ωср ∙ [б]
| ωmin = ωср (1- )
|
Из выражения для ωi, используя (8) найдем значения углов ψmax и ψmin которые будут соответствовать ωmax и ωmin
| (9) |
|
В выражениях (9) величиной ( )2 пренебрегли, ввиду малости. Значения масштабных коэффициентов kJ, kE берутся из графика. При экстремальных значениях угловой скорости соответствующие учи касаются диаграммы энергомасс. Проведя такие лучи под углами ψmax и ψmin и касаясь ими диаграммы получим изображение на графике.
Если лучи пересекутся левее оси ординат в точке O1 , то маховик необходим и его приведенный момент будет определяться
Jнпр = kJ ∙O1 С кг∙м2 (10)
Если точка лежит вне предела чертежа то удобнее пользоваться формулой
Jнпр =  (11)
(11)
Она получается из рассмотрения ∆ O1oc и O1bc
Определения маховых масс с помощью графиков приведенных моментов движущих сил Мgпр и сил сопротивления Мспр.
В данном случае можно приближенно находить Jнпр как в случае зависимости  и , так и при функциях
и , так и при функциях  и
и  .
.
Подробнее остановимся на первом случае
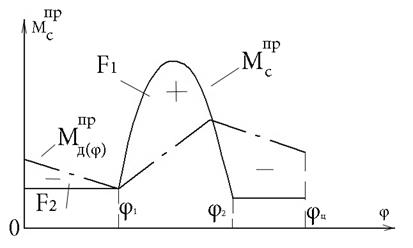
Построим заданный график зависимости за цикл


| 
|
Поскольку  , то в первом приближении построим
, то в первом приближении построим  в виде некоторой ломанной линии, установив при этом, что при
в виде некоторой ломанной линии, установив при этом, что при  и
и 
 и
и  соответственно, а заштрихованные со знаком (+)(+) F1 и (-) F2 равны. Первые два следуют из (1) , а последнее из равенства работ
соответственно, а заштрихованные со знаком (+)(+) F1 и (-) F2 равны. Первые два следуют из (1) , а последнее из равенства работ  в цикле. Также можно считать, что Jпр ≈ const.
в цикле. Также можно считать, что Jпр ≈ const.
Поскольку площади F1 (или F2) выражают избыток энергии, которая должна быть «поглощена» машины, то на основании теоремы об изменении кинетической энергии имеем.
 (12)
(12)
Где  (масшт. Коэфф. kм , kφ и площадь F1 из графика)
(масшт. Коэфф. kм , kφ и площадь F1 из графика)
На основании допущений  (
(  - требуемый привод. Момент инерции МА)
- требуемый привод. Момент инерции МА)  , а
, а  , что следует из физического смысла зависимостей
, что следует из физического смысла зависимостей  ,
,  и равенства (1)
и равенства (1)
Из (12) следует
Поскольку машина уже обладает определенным  , то
, то
 (13)
(13)
Если  , то маховик не нужен
, то маховик не нужен
Элементы конструирования маховика.
Если маховик необходим, то обычно его стараются совместить со звеном приведения. Как правило маховик выполняется в виде диска или кольца. Размеры этих маховиков можно определить исходя из обеспечения требуемого  .
.
 - для диска
- для диска
 - для кольца. Здесь m – масса маховика
- для кольца. Здесь m – масса маховика
Для уменьшения размеров маховика желательно его устанавливать на наиболее быстроходном звене. При этом необходимо пересчитать значение по формуле:
, ωср, ωб – известны, а  определяем и далее находим новые размеры маховика.
определяем и далее находим новые размеры маховика.
Физический смысл «работы» маховика в накоплении и отдаче энергии
3. Основы теории автоматического регулирования машин (САР)
Постановка задачи. Основные понятия САР
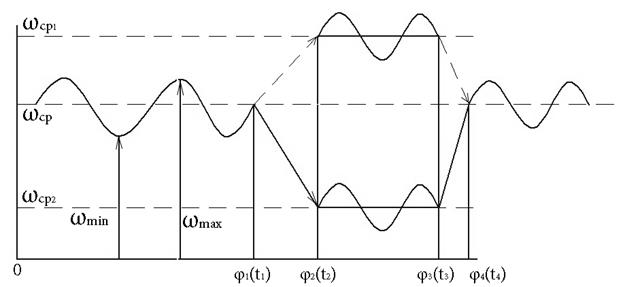
Рассмотрим установившееся движение МА. В некоторый момент времени t1 из за случайного изменения энергии, поступаемой к машине, номинальная ωср за некоторый интервал  становится равной ωср1 > ωср или ωср2 < ωср. Изменение ωср до ωср1 или ωср2 зависит от того, больше или меньше энергии от номинального значения соответственно поступило в машину, а интервал [t1;t2] от физических свойств машин и условий ее работы. Для нормальных условий работы МА необходимо предусмотреть в нем устройство которое бы за некоторый интервал времени возвратило его движение к прежней номинальной угловой скорости ωср
становится равной ωср1 > ωср или ωср2 < ωср. Изменение ωср до ωср1 или ωср2 зависит от того, больше или меньше энергии от номинального значения соответственно поступило в машину, а интервал [t1;t2] от физических свойств машин и условий ее работы. Для нормальных условий работы МА необходимо предусмотреть в нем устройство которое бы за некоторый интервал времени возвратило его движение к прежней номинальной угловой скорости ωср
|
Исследование условий, при которых возможна такая работа машины, и составляет содержание поставленной задачи. В обзем случае возможна и точная постановка задачи когда требуется изменение по определенному закону. Все это решается с помощью САР.
Основные элементы необходимые машине с САР.
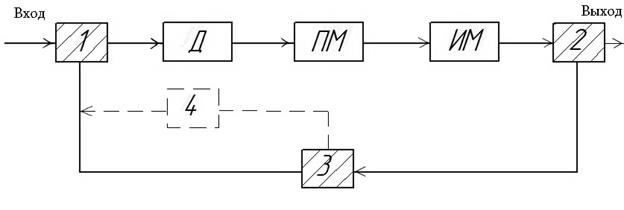
Знаем: Д – двигатель , ПМ – передаточный механизм, ИМ – исполнительный механизм
Прежде всего – это наличие обратной связи между входом и выходом
Система автоматического регулирования движения механизма
|
Обратную связь обеспечивает механизм 2, измеряющий выходной параметр (ω) , регулятор 3, который принимает сигнал от механизма 2, сравнивает его с эталонным и в случае их рассогласования (до определенного предела) подает соответствующий сигнал на механизмы 1. регулирующий подачу энергии к машине. Основным элементом САР является регулятор от которого зависит точность работы. Из-за этого чисто используется непрямая САР имеющая дополнительно элемент 4 – усилитель сигнала вызываемого регулятора.
Дата добавления: 2015-12-22; просмотров: 931;