Элементы пневмоприводов
В состав пневмоприводов, как и гидроприводов, входят исполнительные механизмы (поршневые, плунжерные, мембранные и сильфонные пневмо-двигатели возвратно-поступательного движения, поворотные двигатели и пневмомоторы), распределительные устройства с ручным, электромехани-ческим и пневматическим управлением (золотниковые, клапанные, крановые), управляющие устройства, обеспечивающие переключение распределителей в соответствии с требуемой последовательностью технологических операций, пневмопреобразователи, пневмоусилители, датчики состояния, например, рассмотренные выше конечные переключатели, задатчики закона движения исполнительного механизма, например, дроссели. Конструктивно многие элементы аналогичны применяемым в гидроприводах.
Источником сжатого воздуха в пневмоприводах являются компрессоры поршневого и пластинчатого типа.
Конструкции поршневых компрессоров простого (а) и двойного (b) действия, представленные на рис.54, во многом напоминают паровые машины, но рабочие процессы в них имеют противоположное направление.
 |
Рис. 54
(delivery – нагнетание; induction – всасывание;
water jacket – водяная рубашка; clearance volume – мертвый объем;
stroke volume – объем, описываемый поршнем)
На рис.55 в p-v-диаграмме изображены обратимые процессы изотер-мического (1-2) и (адиабатного 1-2') сжатия. В первом случае абсолютная величина потребляемой компрессором удельной работы, если считать сжимаемый газ идеальным, равна
 |
а во втором
 |
В действительности сжатие газа сопровождается теплообменом со стенками цилиндра и может быть описано политропой с переменным показателем. Вначале, когда тепловой поток направлен от стенок цилиндра к свежей порции газа, n> k, а в конце процесса сжатия, когда меняется направление теплового потока, n< k. Работу компрессора в этом случае рассчитывают по среднему показателю политропы. Дополнительное влияние на характер процесса оказывает тепло трения.
Потери в реальных компрессорах учитываются изотермическим КПД при интенсивном охлаждении цилиндра или адиабатическим КПД, если оно отсутствует. Для промышленных компрессоров hиз=0,5-0,8; hад =0,82-0,85.
Работа, потребляемая неохлаждаемыми компрессорами, может быть уменьшена переходом на двухступенчатое сжатие с охлаждением газа в межступенчатом теплообменнике до исходной температуры. Наглядно это иллюстрируется рис.55, где экономия работы изображается заштрихованной площадкой.
 |

 |  |

 |





 рпром
рпром


 |

 р1 1
р1 1
| |
 Рис. 55
Рис. 55
На рис.56 схематично изображен объемный пластинчатый компрессор. Он состоит из ротора, расположенного экцентрично в корпусе и опирающегося на подшипники. В пазы ротора вставлены подвижные пластины, изготавливаемые из антифрикционных материалов. Когда пластина проходит всасывающее окно, начинается сжатие газа вследствие уменьшения объема между ротором и корпусом компрессора. После открытия нагнетательного окна сжатый газ выталкивается в ресивер.
 |
Рис.56
Производительность пластинчатых компрессоров достигает 150 м³/мин, а отношение давлений в специальном исполнении – до 20.
Схема управления пневмоприводом с контролем по давлению приведена на рис.57. Оно обеспечивается клапаном, срабатывающим по достижении заданного давления или разности давлений в полостях.
 |  | |



 2 5
2 5
















y
3 1
4
Рис. 57
В исходном положении нижняя полость клапана 1 и поршневая полость пневмоцилиндра 2 соединены через распределитель 3 и дроссель 4 с атмо-сферой. В верхнюю полость клапана и штоковую полость пневмоцилиндра поступает сжатый воздух. Поршень находится в крайнем левом положении, а канал управления у, который дает команду на выполнение следующей опе-рации, перекрыт, так как объект 5 не зажат. При переключении распределителя сжатый воздух поступает в поршневую полость цилиндра, поршень передвигается вправо и зажимает объект. Одновременно падает давление в верхней полости клапана и растет в нижней. Когда разность давлений станет достаточной для преодоления усилия пружины клапана, управляющий канал открывается и подается команда на выполнение следующей операции.
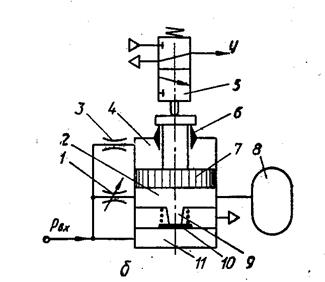
С аналогичной целью может использоваться пневмоклапан, показанный на рис.58. При подаче воздуха в полость 11 мембрана 10 перекрывает сопло 9, отсекая рабочую полость 2 от атмосферной линии. Через регулируемый дрос-сель 1 она и емкость 8 наполняются воздухом. Одновременно через дроссель 3 воздух поступает в полость 4, создавая противодавление. Через некоторое время давление в рабочей полости становится достаточным для перемещения поршня с заслонкой на штоке. Полость 4 быстро опорожняется, шток “выстре-ливает” и переключает распределитель 5, на выходе которого появляется сигнал управления у. В конце хода поршень перекрывает щель 6 и полость 4 герметизируется. Для подготовки клапана к повторному срабатыванию достаточно снять давление на входе. Откроется сопло 9 и опорожнится емкость 2. Под действием пружины распределителя 5 поршень вернется в исходное положение. Изменение времени появления управляющего сигнала достигается подбором объема емкости 8 и настройкой дросселя 1.
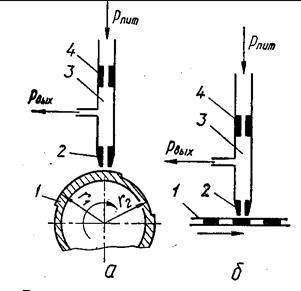
Управление может также осуществляться с контролем по перемещению. Кроме приведенных выше примеров с конечными выключателями, к этой группе относятся приводы с кулачковыми переключателями каналов пнев-мораспределителей и шифраторами с кодирующим диском или перфокартой (рис. 59).
| 
|
| Рис. 58 | Рис. 59 |
Пневмопреобразователи выполняются по принципу компенсации пере-мещения чувствительного элемента или компенсации усилия на него, которые преобразуются в пропорциональное давление воздуха.
К первой группе относятся рассмотренные в гидроприводе преобразова-тели типа сопло-заслонка, имеющие близкие к линейным характеристики.
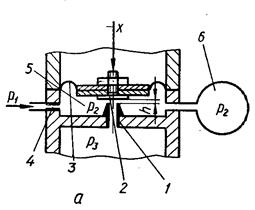
Представителем второй группы является преобразователь, изображенный на рис.60.
| 
|
Рис. 60
Он состоит из нерегулируемого дросселя 4, через который воздух от источ-ника питания с давлением р1 поступает в междроссельную камеру 5, управ-ляемого дросселя 2 с заслонкой 1, смонтированной на эластичной мембране 3, защемленной в корпусе преобразователя. Обычно мембраны изготавливают из прорезиненной ткани или металлизированного найлона. Входным сигналом преобразователя является усилие х, приложенное к центру мембраны. Компенсация этого усилия осуществляется давлением р2 находящегося в камере 5 воздуха, которое пропорционально перемещению заслонки. Воздух с этим давлением направляется в распределитель пневмодвигателя.
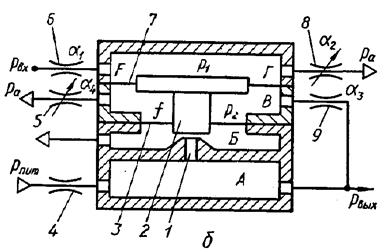
Дискретный усилитель мембранного типа изображен на рис.61. Он сос-тоит из камер А,Б,В, разделенных мембранами 4 и 2. Жесткие центры мембран связаны втулкой 3 и являются одновременно заслонками сопел 1 и 6. Пружина 5, настраиваемая на определенный порог срабатывания, прижимает мембран-ный блок к соплу 1, питаемому сжатым воздухом с давлением р1. Воздух с давлением р2, подлежащим усилению, подводится в камеру Б. Выходная линия усилителя с давлением р3 через сопло 6 и камеру В связана с атмосферой. При отсутствии входного сигнала заслонка под действием пружины перекрывает сопло 1 и воздух в выходную линию не поступает. Когда давление р2 превышает порог чувствительности мембраны, открывается сопло 1 и перекрывается сопло 6. Происходит усиление входного сигнала вплоть до давления питания р1.
Дата добавления: 2015-11-26; просмотров: 989;