ФЕРРОЗОНДОВЫЙ МЕТОД КОНТРОЛЯ
Феррозондовый метод контроля основан на обнаружении феррозондовым преобразователем (ФП) магнитных полей рассеяния и предназначен для выявления подповерхностных дефектов типа нарушений сплошности: волосовин, плен, трещин, ужимов, закатов, раковин и т.д. Феррозондовый преобразователь реагирует на резкое пространственное изменение напряженности магнитного поля над дефектами и преобразует градиент напряженности поля в электрической сигнал.
Выбор ФП в качестве индикаторов магнитного поля рассеяния над дефектами в намагниченной детали обусловлен рядом преимуществ: малой потребляемой мощностью, незначительными габаритами, высокой надежностью работы, высоким КПД и избирательностью к локальным магнитным полям рассеяния.

Рисунок 14. Схема построения приборов с феррозондовыми преобразователями.
Большинство приборов с использованием ФП строится по схеме, представленной на рисунке 14. Генератор (Г) питает обмотки ФП стабилизированным переменным напряжением частотой f. Из сигнала, поступающего с феррозондовых преобразователей и несущего весь спектр частотfΣ, полосовым фильтром (ПФ) выделяется вторая гармоника 2f, несущая информацию о внешнем магнитном поле. Сигнал усиливается усилителем (У), детектируется детектором (Д) и поступает на индикатор (И) (стрелочный прибор, сигнальная лампа или исполнительный механизм). Чувствительность феррозондового контроля определяется [3] совокупностью физических факторов (магнитными свойствами материала контролируемого изделия, типом дефектов и их ориентацией, шероховатостью контролируемеой поверхности, способом контроля и намагничивания деталей, чувствительностью ФП и электронной аппаратуры, способом обработки сигнала ФП). ГОСТ Р21104-02 устанавливает одиннадцать условных уровней чувствительности. Чувствительность контролируют на стандартных настроечных образцах, имеющих естественные или искусственные дефекты.
Феррозондовому контролю подвергаются боковые рамы и надрессорные балки тележек грузовых вагонов, балансиры и соединительные балки тележек, рамы тележек ЦМВ, КВ3 И2, КВ3-ЦНИИ, корпуса автосцепок, тяговые хомуты поглощающих аппаратов и др. Минимальная длина выявляемого дефекта – 2 мм.
При феррозондовом методе контроля в зависимости от магнитных свойств материала, размеров и геометрии контролируемых деталей реализуются два способа контроля: способ приложенного поля (СПП), заключающийся в намагничивании деталей и регистрации магнитных полей рассеяния дефектов при включенном (установленном на деталь) намагничивающем устройстве (НУ); способ остаточной намагниченности (СОН), заключающийся в намагничивании изделий и регистрации магнитных полей рассеяния после снятия или выключения НУ (в остаточном магнитном поле).
Контроль СПП рекомендуется применять для изделий из материалов с коэрцитивной силой Hc<1280 А/м и остаточной магнитной индукциейBр<0,53 Тл. СОН следует применять для контроля изделий из материалов с высокими значениями коэрцитивной силыHc>1280 А/м иBр>0,53 Тл.
Следует учитывать ложные срабатывания индикаторов дефектоскопов, не связанные с дефектами (структурная неоднородность материалов, магнитные пятна, шероховатость контролируемой поверхности, неоднородность намагничивающего поля), именуемыми помехами или фоном. Этот недостаток устранен при использовании дефектоскопов с автоматической (зависящей от фона) настройкой порога чувствительности.
К средствам феррозондового контроля относятся: дефектоскопные феррозондовые установки, включающие в себя два дефектоскопа градиентометра, или магнитоизмерительных комбинированных прибора, намагничивающие устройства, стандартные образцы предприятий (СОП); дополнительные устройства, в состав которых входят измерители напряженности магнитного поля, зарядная станция, компьютер, преобразователь интерфейса.
ФП, применяемые при контроле деталей подвижного состава, подразделяются на:
· феррозонды-полемеры, предназначенные для измерения абсолютной величины напряженности магнитного поля и преобразования ее в электрической сигнал;
· феррозонды-градиентометры, используемые для измерения градиента напряженности магнитного поля от одной точки контролируемой поверхности детали к другой.
В зависимости от схемы включения катушек ФП (рис.15) может измерять либо среднее значение нормальной составляющей поля Hnв объеме, занимаемом стержнями, либо разницу полей (градиента нормальной составляющей поля), в которых находятся первый и второй сердечники. Напряженность поля измеряется в А/м, а градиент поля в А/м2. Расстояние Δх между сердечниками называется базой ФП. Для большинства деталей Δх=4 мм, а для деталей сложной формы (например, автосцепка) Δх=3 мм.
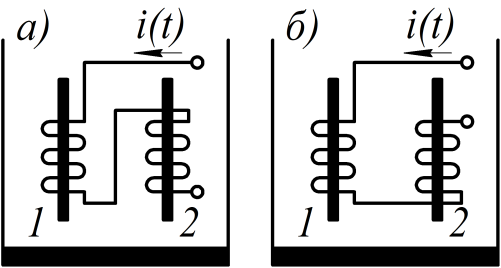
Рисунок 15. Схема включения обмоток ФП: а – схема включения обмоток для измерения градиента; б – схема включения обмоток для измерения напряженности поля.
Дата добавления: 2015-12-16; просмотров: 2266;