Примеры систем управления
3.1. Примеры СУ техническими объектами
А. Системы стабилизации напряжения генератора
На рис. 2.3 изображена схема простейшей системы стабилизации напряжения генератора. Объектом управления является генератор Г, регулируемой величиной - напряжение Uг, задающей величиной Uо.
В качестве эталонного напряжения, задаваемого стабильным, но маломощным источником, является напряжение Uо, то есть задающее воздействие g(t) = Uо. С выхода генератора (Г), якорь которого вращается двигателем (М), снимается напряжение Uг. Если напряжение Uг ≠ Uо, то ко входу усилителя будет приложено разностное напряжение
∆ U = Uо - Uг,
которое является сигналом ошибки САУ. Чем больше это напряжение, тем выше напряжение на выходе усилителя А1 и тем больший ток протекает по обмотке возбуждения генератора (ОВГ), а, следовательно, тем большее напряжение будет на его выходе. С увеличением напряжения Uг разность ∆ U уменьшается, что приводит к уменьшению Uг.
Если Uг › Uо, то разность ∆ U становится отрицательной, и поток, создаваемый обмоткой ОВ2, будет вычитаться из потока, создаваемого обмоткой возбуждения ОВ1.
При некотором ∆ U на выходе генератора устанавливается постоянное напряжение, которое может и не совпадать с напряжением Uо. Чем меньше ∆ U, тем очевидно меньше и ошибка системы. Уменьшение сигнала ошибки достигается увеличением коэффициента усиления усилителя А1.
Б. Система программного управления летательного аппарата
Электрическая принципиальная схема данной системы представлена на рис. 2.4, а структурная схема – на рис. 2.5.
Если текущее угловое положение летательного аппарата ЛА (объекта управления ОУ) -  отлично от заданного
отлично от заданного  , формируемого программным устройством (ПМ), то сигнал, снимаемый с выхода чувствительного элемента (ЧЭ), пропорциональный разности
, формируемого программным устройством (ПМ), то сигнал, снимаемый с выхода чувствительного элемента (ЧЭ), пропорциональный разности
будет отличен от нуля.
Чувствительным элементом является потенциометрический датчик, основание которого жестко закреплено на корпусе летательного аппарата (самолета), а контактный движок соединен с программным устройством.
С датчика сигнал поступает на корректирующий контур (КК) и через него на двухтактный магнитный усилитель (модулятор ММ), с выхода которого снимается сигнал переменного тока. Он подается на усилитель (А1), а затем на демодулятор (ДМ), с которого сигнал постоянного тока подается на электромеханический привод (ПЭМ) и рулевую машинку (РМ), приводящую в движение рули. Рули изменяют угловое положение ЛА таким образом, чтобы ошибка  была минимальной.
была минимальной.
Через потенциометр обратной связи (ПОС) рулевой машинки сигнал, пропорциональный отклонению рулей, поступает по цепи обратной связи (ОС) на вход усилительно-преобразовательного устройства для улучшения динамических свойств охваченных элементов.
Если  в данной системе будет изменяться по произвольному закону, то САУ будет следящей, а не программного управления, как это имеет место в рассмотренном примере, где является известной функцией времени.
в данной системе будет изменяться по произвольному закону, то САУ будет следящей, а не программного управления, как это имеет место в рассмотренном примере, где является известной функцией времени.
Упрощенная схема следящей САУ отработки угла представлена на рис. 2.6, а, б. Регулируемой величиной является угол  поворота управляемого объекта (4). Приводной двигатель (3) питается от электромашинного усилителя (5). Входное воздействие подается на сельсин-датчик (1) в виде угла поворота
поворота управляемого объекта (4). Приводной двигатель (3) питается от электромашинного усилителя (5). Входное воздействие подается на сельсин-датчик (1) в виде угла поворота  его ротора. Соединенный по трансформаторной схеме сельсин-датчик (1) и сельсин-приемник (2) связаны с ротором двигателя и вырабатывают напряжение U
его ротора. Соединенный по трансформаторной схеме сельсин-датчик (1) и сельсин-приемник (2) связаны с ротором двигателя и вырабатывают напряжение U  , пропорциональное рассогласованию
, пропорциональное рассогласованию  между входным и выходным валами системы. Напряжение ошибки усиливается усилителем А1 и электромашинным усилителем и поступает на якорь исполнительного двигателя, поворачивающего одновременно объект (нагрузку) (4) и ротор сельсин-приемника до тех пор, пока рассогласование не станет равным нулю.
между входным и выходным валами системы. Напряжение ошибки усиливается усилителем А1 и электромашинным усилителем и поступает на якорь исполнительного двигателя, поворачивающего одновременно объект (нагрузку) (4) и ротор сельсин-приемника до тех пор, пока рассогласование не станет равным нулю.
В последние годы к основным алгоритмам добавились алгоритмы поиска экстремумов некоторых параметров или функций от параметров процесса, характеризующих качество процесса, алгоритмы оптимизации, алгоритмы адоптации.
3.2. Примеры СУ организационными и экономическими объектами
Объектами управления организационно-экономических систем и АСУ войсками являются человеческие коллективы. А основной формой передачи информации является документ. Для АСУ технологическими процессами или оружием объектом управления является технологический процесс, прибор, устройство, конкретный образец вооружения, а основной формой передачи информации – сигналы различной физической природы.
По степени автоматизации АСУ подразделяются на информационные, информационно-советующие и управляющие.
Информационная система представлена структурной схемой на рис. 2.7.
Любой организационный или экономический процесс имеет управляемые переменные, на которые можно целенаправленно воздействовать, и неуправляемые, которые в данной конкретной ситуации не поддаются изменению или изменять которые нецелесообразно. На входе и выходе объекта управления установлены измерительные элементы (ИЭ), с помощью которых собирается информация о входных переменных и результатах функционирования объекта. Данная информация поступает в ЭВМ. После обработки в соответствии с заранее заданными алгоритмами информация в удобном для восприятия человеком виде поступает на устройство отображения параметров процесса (УОПП). Оценив полученную информацию, оператор формирует управляющие воздействия и реализует данные воздействия через управляющие органы (УО), изменяя значение
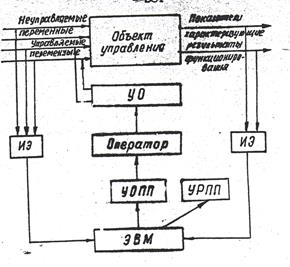
Рис. 2.7. Структурная схема информационной системы
управляемых переменных. Таким образом, основное назначение информационной системы заключается в обеспечении оператора информацией в удобном для восприятия виде.
Информационно-советующая система (рис. 2.8). Информация о функционировании объекта управления и состояния внешней среды, собранная с помощью измерительных элементов, поступает в ЭВМ. После обработки поступающей информации в соответствии с заданными алгоритмами обобщенная информация фиксируется в устройстве регистрации параметров процесса и поступает к оператору в виде готовых рекомендаций. Оператор принимает окончательное решение по выбору управляющего воздействия с учетом поступивших рекомендаций и информации, поступающей к нему помимо АСУ. Таким образом, информационно-советующая система наряду с выполнением функций информационной системы принятие решения.
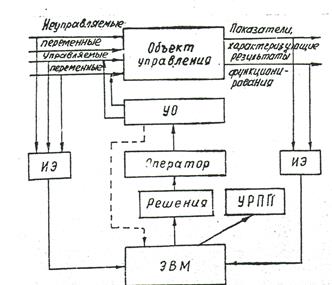
Рис. 2.8. Структурная схема информационно-советующей системы
Управляющая система. Данная система представлена на структурной схеме рис. 2.9 и отличается от информационно-советующей тем, что вырабатываемые ЭВМ решения могут быть реализованы непосредственно через управляющие органы (УО) без вмешательства человека. Оператор в данном случае не включается непосредственно в контур управления. Но имеет возможность корректировать принимаемые ЭВМ решения по выбору управляющих воздействий.
По уровню управления АСУ классифицируются в соответствии с иерархией управления от АСУ конкретным технологическим процессом, образцом вооружения, до АСУ отраслью производства, видом вооруженных сил. Четкая классификация по уровню управления выявляет иерархические связи управляемой системы, создает предпосылки для продуктивного исследования взаимного влияния параметров этих связей и определения места и роли локальных АСУ в общей системе автоматизированного управления.
Такая классификация способствует определению внутреннего содержания каждого уровня, которое меняется как по составу и объему решаемых задач, так и по важности их решения для системы в целом.
Дата добавления: 2015-12-11; просмотров: 1401;