Средства отображения информации
Наиболее сложными и ответственными согласующими элементами в системах «человек — машина» являются средства отображения информации, под которыми понимается класс технических средств, используемых для создания динамических информационно-оперативных моделей управляемых объектов. На основе получаемых с их помощью данных оператор оценивает состояние системы в целом и ее отдельных объектов, выявляет характер отклонений в технологическом режиме. Это позволяет ему планировать операции по управлению объектом, принимать решения о наиболее эффективном воздействии на объект и контролировать результаты своих действий [95].
Наиболее общие требования к средствам отображения информации заключаются в следующем [9, 44; 95]:
1) они должны обеспечивать подачу оператору информации в количествах, достаточных для оценки ситуации, принятия решения и контроля за его исполнением; при этом количество выводимой информации должно соответствовать реальным возможностям человека по переработке информации;
2) информация должна быть представлена в форме, наиболее соответствующей особенностям восприятия, специфике выполняемых оператором функций и общим условиям его работы;
3) выводимая информация должна быть отображена в те моменты, когда в ней возникает необходимость.
Определение оптимального количества информации, представляемой оператору, является в настоящее время одной из центральных проблем конструирования средств отображения. Критерий оптимальности должен учитывать и технологические, и психологические факторы. В связи с интенсивной централизацией управления производством проблема оптимального количества информации весьма усложняется. Резко возрастает объем технологического оборудования и соответственно — число контролируемых параметров, а их выведение на средства отображений информации повышает интенсивность потока сигналов сверх допустимых пределов. Известно, что увеличение темпа поступления сигналов приводит, к резкому падению точности действий. Например, было установлено, что при увеличении числа сигналов от 75 до 95 и затем до 120 в минуту процент ошибочных действий возрастает соответственно от 25 до 58 и затем до 87%. Но и уменьшение числа сигналов, поступающих в единицу времени, ниже определенного уровня тоже приводит к снижению надежности работы операторов: увеличиваются пороги обнаружения сигналов, снижается точность слежения за изменениями, т. е. происходит так называемая потеря бдительности. Поэтому неправы и те конструкторы, которые, внедряя системы комплексной автоматизации, снижают до минимума количество представляемых оператору сведений: в критических ситуациях он оказывается в условиях резкого дефицита информации.
В зависимости от того, как решаются проблемы сокращения объема информации, меняются типы и виды устройств отображения информации. Одни представляют собой детальное отображение всех контролируемых параметров, другие дают обобщенные сведения, объединяя ряд параметров в едином признаке. В одних устройствах отображения выводимые параметры отображаются непрерывно, в других предусмотрена возможность их отображения лишь в отдельные моменты, определяемые вызовом оператора или программой выдачи. Иными словами, форма отображения информации выступает в качестве одного из средств регулирования ее объема. Форма представления информации важна и с другой точки зрения: в какой степени она позволяет оператору представить течение управляемых процессов и все происходящие в них изменения.
К основным типам способов отображения информации, определяющих разнообразие форм ее представления, можно отнести: аналоговый, дискретный, релейный и графический.
С помощью аналогового способа отображаются параметры, характеризующие основные режимы технологического цикла. Этот способ применяется везде, где необходимы знания о величине и знаке изменений текущих значений контролируемых параметров в зоне допустимых значений. Наиболее распространенным видом этого типа представления информации являются приборы со шкалами и стрелками. Форма их бывает различная: используются круглые, полукруглые, горизонтальные и вертикальные шкалы. Выбор любой из этих форм в каждом случае определяется характером решаемых оператором задач и требуемой точности считывания.
Самая высокая точность считывания обеспечивается при использовании круглой и полукруглой шкалы, наименее высокая— при вертикальной шкале. Но для решения задач типа контроля глубины (высоты) или температуры лучшего эффекта достигают при использовании именно вертикальной шкалы, что связано с большей их близостью к естественно сложившимся представлениям об этих параметрах («выше—ниже»). В соответствии с этой же особенностью на вертикальных шкалах определяется и конкретное положение нуля: на глубиномерах он располагается у верхнего края вертикальной шкалы, на высотомерах — у нижнего, и на приборах, измеряющих температуру, его положение зависит от основного диапазона измеряемых температур.
В настоящее время разработано много рекомендаций по соотношению общих размеров шкал с величиной отметок и цифр, по выбору способа оцифровки шкал и определению численных значении цены делений, по расположению стрелок и указателей и т. п. Среди них есть рекомендации общего характера, соблюдение которых необходимо в любых случаях. Например: рекомендуется простая форма стрелки: цвет основной части стрелки — от центра до кончика — должен быть одинаковым с цветом отметки шкалы; стрелки должны быть широкими у основания, а кончик — не шире величины отметки шкалы и т. п. Но есть рекомендации, применение которых требует предварительного анализа функций оператора и учета всей совокупности выводимой ему информации. Например, градуировка шкал требует учета необходимой для решения задач точности считывания: положение нуля, как и любой другой точки отсчета, определяется по возможности одинаковым для всего комплекса шкальных приборов, расположенных в непосредственной близости друг от друга; размеры прибора определяются на основе анализа частоты его использования, а также особенностей формы и размеров окружающих его приборов.
Дискретный способ отображения информации применяется, как и аналоговый, во всех случаях, когда требуется получить значения изменения контролируемых величин в зонах допустимых значений. Но в отличие от условий применения аналоговой формы, тут нет необходимости контролировать все промежуточные значения происходящих изменений: задачи управления успешно решаются, если обеспечивается выведение значений контролируемых параметров с заданной дискретностью во времени. Этот способ широко применяется для выведения информации о скорости течения процесса, его общей длительности к данному моменту времени, о расходах материалов, энергии, величинах готовой продукции, для отображения количества произведенных операций и т. п. Наиболее распространенная форма представления такой информации — цифровая. Она обеспечивается такими техническими средствами, как счетчики различных типов. В ряде Случаев они совмещаются с аналоговыми устройствами отображения информации: некоторые шкальные приборы, помимо непрерывного отображения изменения параметра, имеют устройства и для дискретного отображения сведений.
Во многих ситуациях, когда требуется контроль большого числа количественных параметров, выводимых с определенной дискретностью, способом их представления становятся таблицы. Основной особенностью таблиц является распределение знаков по столбцам и строчкам, имеющим самостоятельное значение, которое обычно дано в словесной или условно-знаковой форме в виде статических надписей в верхней горизонтальной и левой вертикальной частях таблицы. Дискретно меняющаяся цифровая (буквенная, знаковая) информация выводится в соответствующих строках и столбцах таблицы. Техническое решение отображения сведений таким способом может быть различным. Табличный способ организации буквенно-цифровой и знаковой информации применяется на электронно-лучевых трубках и специальных табло — механических, оптических и электролюминесцентных, а также в виде печати различного типа.
При считывании информации с таблицы глаз совершает прослеживающие горизонтальные и вертикальные движения, точность и быстрота которых определяется структурой табло, его абсолютными и угловыми размерами, величиной знаков и интервалов между ними, яркостью, контрастом и цветом. Требования к размерам и световым характеристикам отдельных знаков те же, что и для изолированных знаков. Требования же к структуре табло (таблиц вообще) требуют специального рассмотрения [85].
Следует избегать однородности поля табло. Уменьшения однородности достигают многими способами. Один из них — чередование показателей с разным числом знаков: необходимо по возможности избегать соседства более чем трех-четырех столбцов с равным количеством знаков в отображаемых параметрах. Снижение однородности обеспечивается делением общего поля таблицы интервалами разной величины и разграничительными линиями. При этом применение таких линий требует известной осторожности: их должно быть немного и использовать их следует для отделения друг от друга связанных по смыслу параметров. Для особо насыщенных информацией таблиц такие разграничения следует подчеркивать и изменением интервалов между параметрами, попадающими в ограничиваемые области. В ряде случаев можно использовать и изменение цветности фона различных участков таблицы.
Нарушение однородности требуется и по вертикали, и по горизонтали во всех случаях, когда угловые размеры этих частей таблицы превышают размеры оперативного поля зрения (свыше 6—10°).
В связи с тем, что наиболее быстрыми и точными являются горизонтальные движения глаз, обычно рекомендуется прямоугольная форма табло с большей стороной по горизонтали. Но принципиальное требование учета преимущества горизонтальных движений глаз может быть выполнено лишь в том случае, если учет количества выводимых сведений идет одновременно с учетом смысловых отношений между ними: следует стремиться к тому, чтобы сведения, требующие частого сопоставления, размещались в горизонтальной строке. Такой анализ в ряде случаев может привести к выводу о большей целесообразности увеличения вертикальных размеров табло, ибо только в этом случае удается обеспечить размещение наиболее важных сведений по горизонтальному маршруту движения глаз.
Для создания оптимальных условий работы с табло, размеры которого значительно превышают размеры оперативного поля зрения, важно использовать и разнообразные способы выделения программным путем или по желанию оператора требующихся в данный момент строк или столбцов. Техническая реализация такого выделения может быть различной по сложности. Иногда эта задача решается совсем просто: использованием скользящей прозрачной линейки (угольника). Во многих же случаях требуются специальные устройства, позволяющие выделять нужные сведения маркером, мерцанием, изменением яркости или цвета знаков, подчеркиванием строки слабо светящейся полосой. Применение таких способов позволяет оператору настолько успешно отвлекаться от всей иррелевантной в данный момент информации, что на скорость и точность его работы практически совсем перестают оказывать влияние такие факторы, как общее количество сведений в табло.
И аналоговый, и дискретный способы представления информации, обеспечивая точную количественную оценку параметров, обладают существенным недостатком: они не позволяют фиксировать историю изменения параметра, что в ряде случаев совершенно необходимо. Для восполнения таких пробелов используется графическая запись: она фиксирует статистическую информацию, где количественные сведения отображаются не только в точных значениях, но и в динамике их изменений. Этот способ представления информации широко применяется для контроля за расходами энергии, материалов, за изменением производительности агрегатов и других технико-экономических показателей. Среди конкретных форм графического отображения информации, широко применяемых в производстве, можно назвать: функциональные графики, столбцовые и круговые диаграммы, гистограммы. Их вычерчивают специальные самопишущие приборы, связанные с соответствующими датчиками непосредственно или через ЭВМ. В ряде случаев их составляет человек в процессе снятия дискретных показаний, а затем использует для принятия решений об изменении технологического режима, использования энергетических и сырьевых ресурсов и т. п. [9, 14].
Графическая форма отображения информации обладает рядом качеств, чрезвычайно важных с точки зрения быстроты оценки происходящих событий. Одно из преимуществ этой формы — высокая степень абстрактности, позволяющая в очень экономной форме представлять оператору не только совокупность признаков, но и их взаимозависимость, и их связь с заданными критериями качества управления. Другое весьма важное преимущество — обеспечение возможности прогнозирования событий на базе накопления значительного объема сведений о характере изменения величин.
Уже эти особенности дают основание использовать эту форму отображения информации достаточно широко. Границы ее применения еще изучены мало, при этом особого внимания требует вопрос согласования ее с другими формами отображения и дополнения ими. Иногда недоработка этих вопросов приводит к тому, что для получения полного представления о характере изменении того или иного параметра необходимо разматывать с барабана самописца и анализировать десятки метров записей А если учесть, что в таких случаях нередко требуется совместный анализ нескольких параметров, сведения о которых регистрировались разными приборами, преимущества этой формы отображения могут быть сведены на нет.
И, наконец, рассмотрим релейный способ отражения информации. Он применяется в случаях, когда не требуется отображение точного значения величин, а необходима лишь фиксация выхода параметров за пределы нормы, определяемой допустимы ми технологическими и предаварийными значениями.
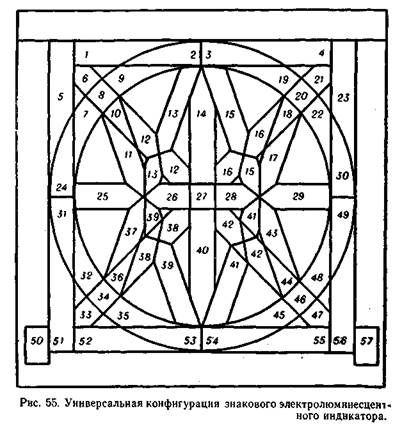
Наиболее распространенные формы отображения информации этого типа — цветовая, знаковая и буквенно-словесная. Для технического обеспечения ее отображения в последнее время все чаще используются электролюминесцентные индикаторы. Электролюминесценция—свечение твердого вещества при его возбуждении электрическими полями или токами — представляет собой непосредственное преобразование электрической энергии в световую. Она наблюдается при воздействии сильного электрического поля на порошок электролюминофора, заключенного в изолирующую среду.
Электролюминесцентные приборы обладают высокой надежностью, большим сроком службы (свыше 1000 часов непрерывного свечения), малым потреблением мощности при относительно высокой яркости свечения. При плоской конструкции и любых габаритах они дают большой угол обзора, т. е. воспринимаются в широком диапазоне углов без искажений и существенной потери яркости. Очень важными их положительными свойствами является широкая возможность варьирования размеров, плотности, формы и цвета свечения знаков в различных условиях внешней освещенности. На рис. 55 приведен пример универсальной конфигурации, позволяющей высвечивать до 350 знаков (буквы латинского и русского алфавита, арабские цифры различного начертания и большое количество геометрических фигур).
Промышленностью разработана и серия электролюминесцентных индикаторов с изменением цвета свечения растрового типа. В них электролюминофоры двух различных цветов свечения нанесены на гребенчатую структуру прозрачных электродов
так, что каждый из них образует черезстрочный растр, точно совпадающий со структурой соответствующего гребенчатого электрода. Это позволяет производить раздельную или одновременную коммутацию каждого цвета, т. е. получить три различных цветовых состояния как минимум (за счет формы можно получить и большее число цветовых состояний). Например, при раздельной коммутации один растр дает голубой цвет свечения знака,
другой — желто-оранжевый, а при одновременной коммутации в результате смешения цветов создается ощущение белого цвета. Растровые индикаторы обеспечивают возможность многомерного кодирования. Так, общую форму знака можно использовать для кодирования типа объекта, изменение цвета его свечения — для кодирования различных состояний (норма, предаварийное, аварийное, работа резервного оборудования), изменение цвета фона может быть применено для кодирования важности данных сведений и т. п.
Те устройства отображения информации, о которых до сих пор шла речь, в основном предназначены для представления сведений об изолированных параметрах. Даже табло, где выводятся сведения о группе объектов или параметров, представляют их совокупность без отражения взаимосвязей и взаимозависимостей. Вместе с тем для решения многих задач управления, особенно при необходимости общей оценки ситуации очень важно иметь сведения о структуре всего управляемого объекта, о функциональных связях его отдельных элементов, о взаимозависимости его параметров, о связи индикаторов и органов управления. Одним из видов устройств отображения, обеспечивающих представление оператору подобных сведений, являются мнемосхемы. Они принадлежат к типу комбинированных устройств отображения, сочетающих в себе несколько способов отображения информации. Существенным элементом мнемосхемы является условное графическое изображение технологических или функционально-оперативных связей, сочетающееся с выведением информации об изменениях состояния агрегатов или других объектов с помощью аналогового, дискретного или аналого-дискретного способов [9].
Мнемосхемы обычно применяются в случаях, когда управляемый объект имеет сложную функциональную структуру, включающую большое число взаимосвязанных параметров, причем эта структура может изменяться в процессе оперативного контроля и, кроме того, возможен избирательный подход к системам контроля и управления. Наибольшее распространение мнемосхемы получили на железнодорожном транспорте, в энергетике, на химических, металлургических и других предприятиях.
В настоящее время известно значительное число типов мнемосхем, различающихся по назначению, местоположению, конструктивным признакам. Выбор конкретного типа основывается на анализе функций и специфики деятельности оператора, на анализе системы оперативного контроля и управления, характеристик управляемого объекта. И тем не менее во многих случаях конструкции мнемосхем, разрабатываемые для конкретных условий производства, имеют существенные недостатки.
Типичным недостатком является несогласованность структуры мнемосхемы с последовательностью управляющих воздействий, которые выполняет оператор на основе анализа информации. Действиям оператора часто мешает и то, что резервное и основное оборудование на мнемосхемах отображается одинаково, тогда как по отношению к ним оператор должен выполнять различные действия (включение или регулирование). Далеко не всегда хорошо подчеркивается структурой мнемосхемы взаимосвязь между индикаторами и органами управления. Цифровые обозначения мнемознаков бывают сложными, причем нередко присвоенная им нумерация не соответствует порядку действий выполняемых операций.
Для обеспечения успешного анализа оператором информации, выводимой с помощью мнемосхем, последние должны отвечать ряду принципиально важных требований. Одно из них состоит в соблюдении принципа лаконичности: мнемосхема должна содержать лишь те элементы, которые необходимы для обеспечения оператора наиболее существенной информацией и выбора оптимального воздействия. Не рекомендуется выносить на мнемосхему несущественные конструктивные особенности объектов. Символы сходных явлений и объектов должны быть по возможности обобщены и унифицированы.
Особое внимание должно быть уделено индикации основных элементов. Следует помнить, что они должны быть выделены особенно четко, независимо от реальных соотношений их истинных размеров с другими объектами, менее важными с точки зрения задач контроля и управления. Если в управляемом объекте есть автономные участки, управляемые независимо от остальных, они должны быть обособлены и на мнемосхеме, независимо от реального их размещения на объекте. Каждый участок мнемосхемы, соответствующий автономному объекту, должен иметь завершенную, легко запоминающуюся и отличную от остальных элементов структуру, отражающую его характер и динамику процессов.
Вообще надо сказать, что при подборе символов для обозначения любых параметров следует стремиться к тому, чтобы эти символы легко ассоциировались с обозначаемыми сообщениями.
Соблюдение указанных требований резко повышает точность действий оператора. Для обеспечения скорости чтения и принятия решения важно обеспечить соответствие расположения индикаторов на мнемосхеме расположению соответствующих им органов управления.
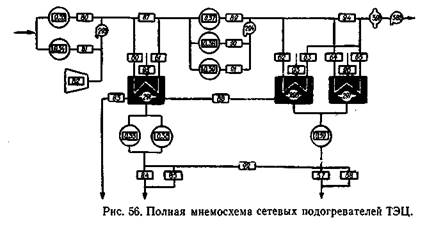
Весьма важно стремиться к тому, чтобы линии мнемосхемы совпадали с маршрутами обзора. Но поскольку реализация этого требования не всегда возможна, рекомендуется использовать сменные мнемосхемы, в которых на общем контуре мнемосхемы в зависимости от характера решаемой задачи вычленяются только отдельные элементы (рис. 56 и 57). Важную роль для организации маршрутов обзора играет и специальное выделение «точек отсчета», т. е. начальных элементов в структуре, размером, формой, цветом и другими средствами. В ряде случаев они позволяют оператору легко выделять те участки мнемосхемы, которые нужны в данной задаче, даже если технические средства не позволяют осуществить вариант сменных мнемосхем [9, 14].
При разработке структурного решения мнемосхем следует помнить и об особенностях движения глаз: структура должна быть рассчитана преимущественно на горизонтальные движения, удельный вес вертикальных движений невелик, а движения по наклонным должны быть вообще редким исключением. Важно также учитывать, что среди горизонтальных движений наиболее быстрыми и точными являются движения слева направо, а среди вертикальных — сверху вниз. И, наконец, при планировании маршрутов обзора следует обеспечивать пространственную близость элементов с прочными функциональными связями.

|
Централизация производства приводит к тому, что оператору выводится все большее количество сведений на устройства различного типа. В этих условиях создаются немалые трудности, особенно при решении задач, 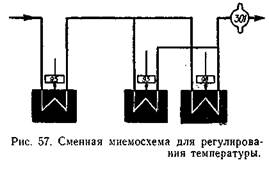 требующих наряду с количественной оценкой большого числа отдельных показаний и качественной оценки ситуации. Одним из путей преодоления подобных трудностей является применение интегральных индикаторов, которые позволяют в экономной форме совмещать информацию о нескольких параметрах. Они находят все большее применение в производствах с высоким
требующих наряду с количественной оценкой большого числа отдельных показаний и качественной оценки ситуации. Одним из путей преодоления подобных трудностей является применение интегральных индикаторов, которые позволяют в экономной форме совмещать информацию о нескольких параметрах. Они находят все большее применение в производствах с высоким
уровнем автоматизации для обеспечения быстрой оценки степени соответствия течения процесса заданным параметрам.
Например, в условиях управления самолетом с помощью автопилота летчику часто важно иметь лишь самое общее представление о выполнении графика полета. Для этой цели созданы интегральные индикаторы, один из вариантов которых представлен на рис. 58. Каждый из четырех индикаторов, связанных с бортовой ЭВМ, информирует об изменении основных параметров полета по сравнению с заданным режимом в виде отклонения стрелки от пунктирной линии, соответствующей выполнению заданных параметров. При необходимости точной оценки отклонений экипаж может вызвать с помощью
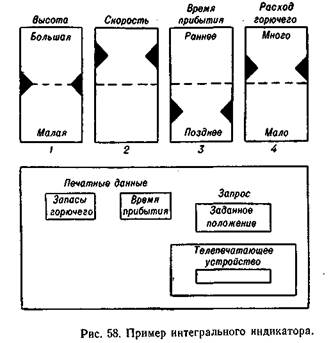
кнопочного селектора точные количественные сведения [40].
В ряде случаев интегральные индикаторы должны обладать еще большей степенью наглядности, обеспечивающей высокую адекватность оценки ситуации. К индикаторам такого типа относятся «коналоги» (контактные 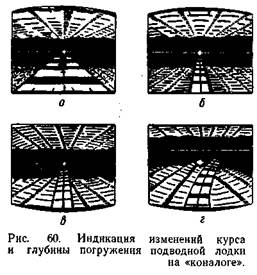 аналоги), создающие эффект непосредственного присутствия человека в определенном событии (чаще всего — в движении). Один из типов такого кона-лога, разработанного в США для подводных лодок, изображен на рис. 59. Оператор находится перед экраном, на котором изображен уходящий вглубь коридор. Если лодка меняет глубину или отклоняется от курса, меняется ширина и кривизна «дороги», создавая полную иллюзию погружения или поворота (рис. 60). Скорость движения лодки легко имитируется скоростью набегания полос, меняющейся под влиянием управляющих воздействий экипажа на лодку [34].
аналоги), создающие эффект непосредственного присутствия человека в определенном событии (чаще всего — в движении). Один из типов такого кона-лога, разработанного в США для подводных лодок, изображен на рис. 59. Оператор находится перед экраном, на котором изображен уходящий вглубь коридор. Если лодка меняет глубину или отклоняется от курса, меняется ширина и кривизна «дороги», создавая полную иллюзию погружения или поворота (рис. 60). Скорость движения лодки легко имитируется скоростью набегания полос, меняющейся под влиянием управляющих воздействий экипажа на лодку [34].
Одной из возможностей решения проблемы интегральных индикаторов является попытка создания абстрактных средств отображения информации, сближающих труд оператора с математическим трудом. Теоретически считается возможным выработать специальный экономный код, с помощью которого оператор сможет вводить в машину цели, пути их достижения, критерии эффективности и команды, получать в той же системе необходимые сведения, оценивать оперативные решения. Этот код должен быть широкого назначения (тина математического), где практически безразлична конкретная технология,— любая из них могла бы быть выражена в этой абстрактной символике. Возможность создания таких моделей определяется общим характером операторского труда. Для решения задач управления в первую очередь наиболее ясно должна выводиться информация об оперативных свойствах объектов. Информация о физико-химических свойствах технологических процессов, конструктивных особенностях объектов и т. п. лишь дополняет первую, помогая оператору запоминать динамические свойства объектов и взаимозависимость параметров и управляющих воздействий. Содержательная интерпретация человеком информации, поступающей со средств ее отображения, с принципиальной точки зрения не является обязательным условием успешного управления объектом в условиях высокой автоматизации.
Во многих случаях можно формализовать взаимосвязь различных параметров с набором управляющих воздействий, выразить их в виде структурных схем, определяющих алгоритмы решения задач оператором по логическим законам и на основе общих математических зависимостей, отражающих функциональные отношения в процессе воздействия на объект регулирования.
Органы управления
До сих пор при анализе требований к техническим звеньям систем речь шла о разных аспектах проблемы передачи сигналов от машины к человеку. Но для решения проблемы согласования звеньев систем не менее важной является проблема передачи сигналов от человека к машине. Та часть технической системы, обеспечивающей ввод управляющих воздействий человека в машину, где осуществляется непосредственное воздействие человека на аппаратуру, получила название органов управления.
Существует несколько типов органов управления. По их конструкции можно выделить кнопки, тумблеры, номеронабиратели, селекторные переключатели, рычаги, маховики, рукоятки, педали и др. Встречаются и комбинированные органы управления, совмещающие два вида в одном устройстве: например, подвижную рукоятку, перемещающуюся в любом направлении, с вмонтированной в нее кнопкой.
По назначению органы управления можно разделить на четыре основных класса [44].
К первому классу относятся органы управления, предназначенные для операций включения, выключения и переключения, которые осуществляются по типу простых дискретных реакций.
Органы переключения в свою очередь могут быть разделены на виды по характеру процесса переключения:
— органы управления с последовательным включением, где соблюдается определенная очередность переходов от одного включения к другому; переключения в этом случае сопровождаются переходом через ряд промежуточных включений (переключатель коммутаторного типа);
— органы управления с избирательным включением, позволяющие переходить от одного включения к любому непосредственно, минуя промежуточные состояния (кнопочные переключатели);
— органы управления с предварительным выбором необходимого включения, дающие возможность подготовить после дующие включения, не нарушая предыдущего, и в нужный момент быстро произвести переключение.
Определение требований к органам управления этого класса зависит прежде всего от того, что в структуре двигательного акта при осуществлении дискретных реакций основная роль принадлежит осязательным микродвижениям. С их помощью отражается форма органа управления, которая является важным элементом с точки зрения обеспечения обратной связи. Она позволяет немедленно после прикосновения информировать о правильности выбора органа управления, что особенно важно в случаях пространственного разделения устройств отображения и ввода информации.
|
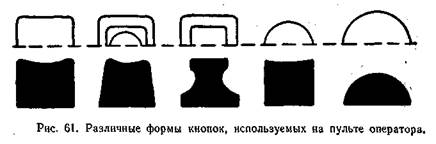
В связи с этим правильность действий оператора может быть резко повышена при использовании кнопок и рукояток различной формы (рис. 61). Однако следует отметить, что большое количество форм, используемых одновременно, вызывает затруднения в опознании, различении и запоминании. Если на одном пульте располагается много органов управления, нежелательно все их делать различными. В этих случаях следует помнить, что хорошим дополнительным средством различения является пространственное расположение.
Для органов управления рассматриваемого типа существенным признаком является их сопротивление воздействию. От мышечного напряжения зависят такие показатели движения, как скорость и точность реакции и устойчивость руки. Так, при увеличении нагрузки на рычаг от 15 до 40 кг латентный период реакции возрастает от 0,16 до 0,75 сек.
Сила, которая может быть развита при выполнении элементарных движений руки, зависит от ряда условий и прежде всего от типа органов управления. Для органов управления, приводимых в движение одним пальцем (типа гашетки), максимальное усилие не должно превышать 4 кГ, а наилучшие условия создаются, если это усилие лежит в пределах 1—2 кГ. Для кнопок сила механического сопротивления должна лежать в пределах от 140 до 550 Г (для одиночных кнопок может быть от 280 до 1120 Г). Для органов управления, приводимых в движение всей рукой, за величину предельного усилия принимается значение 6—6,5 кГ. В случае, когда органу управления нужно сообщить перемещение для точной установки, рекомендуемое усилие должно быть снижено до 2,5 кГ. При этом надо учитывать, что рекомендуемые усилия всегда должны быть при любом способе воздействия в несколько раз меньше, чем те усилия, которые реально доступны человеку.
Сила, которая может быть развита при выполнении элементарных движений, варьирует в зависимости от их направления, что также необходимо учитывать в конструкции органов управления. Усилия, развиваемые рукой, наиболее велики при толкании от себя в горизонтальном направлении, хуже — при вытягивании на себя, еще хуже — вбок. Соответственно этому следует рассчитывать и сопротивление органов управления.
Ко второму классу органов управления относятся такие, с помощью которых выполняется ряд повторяющихся движений (печатание перфокарт, машинопись, передача радиосигналов). Эти движения могут быть вращательными, нажимными и ударными.
Одной из важнейших характеристик движений, определяющих требования к органам управления, является темп движений. Исследованиями вращательных движений (манипулирование с ручками и маховиками) установлено, что максимальный темп вращения для ведущей руки равен 4,83 об/сек, для неведущей— 4 об/сек. Обнаружилась также зависимость темпа вращения от радиуса вращаемых рукояток и величины их сопротивления. При минимальном сопротивлении наибольший темп дают рукоятки с радиусом 3 см. С увеличением радиуса до 24 см максимальный темп сокращается почти вдвое; уменьшение радиуса дает менее заметное сокращение темпа. Максимальный темп нажимных движений при величине усилия 25 Г для ведущей руки составляет 6,68 нажимов в секунду, для неведущей — 5,3. При увеличении усилия эти различия уменьшаются. Максимальный темп ударных движений пальцами варьирует от 5 до 14 ударов в секунду, причем темп может быть увеличен при смене рабочих пальцев. Как показали измерения, интервал между движениями одного и того же пальца равен 0,09 сек, между движениями пальцев одной руки — 0,03 сек, а между движениями пальцев разных рук — 0,02 сек.
В том случае, когда движения выполняются в ответ на ряд дискретных сигналов, их темп оказывается более медленным. Для того чтобы человек мог реагировать на каждый сигнал, интервалы между ними должны быть не менее 0,5 сек. Если сигнал для второго движения подается через более короткий промежуток времени, то реакция на него задерживается; при высоком темпе сигналов задержки аккумулируются и возникает так называемая психологическая блокировка: часть сигналов пропускается, а ответы на другие сигналы следуют с большим латентным периодом. :
Если сигналы подаются ритмично, то по мере тренировки человек усваивает их временную структуру,— появляется возможность предугадывания. В этом случае реакция на последующий сигнал может наступить раньше, чем завершилась реакция на первый, что позволяет резко увеличить темп.
К третьему классу органов управления относятся такие, с помощью которых осуществляется непрерывное регулирование, настройка аппаратуры или точная нацеленная установка управляемого объекта.
Требования к ним определяются возможностями дозирования движений по их силовым, пространственным и временным параметрам в соответствии с некоторой заданной мерой. Так, наибольшая точность без визуального контроля достигается при установке рукояток на 0; 90 и 180°. Промежуточные значения между 0 и 90° дают небольшие положительные ошибки, а положения между 90 и 180°—отрицательные ошибки. При этом в диапазоне 0—90° точность выше при регулировании правой рукой, а в диапазоне 90—180° — левой рукой.
Скорость и точность регулирования существенно зависит от соотношения перемещения рукоятки и связанного с этим перемещением регулируемого указателя. Наиболее важно обеспечить определенное пространственное соответствие направления перемещения органов управления с движением
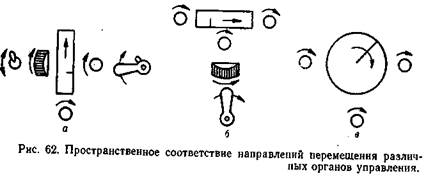
управляемых агрегатов или их указателей (рис. 62). Имеет значение и количественное соотношение угла перемещения органа управления и указателя. Оптимальным является такое соотношение, при котором полный поворот рукоятки дает перемещение указателя на 2,5—5 см.
К четвертому классу органов управления относят те из них, которые предназначены для выполнения непрерывных перцептивно-моторных задач, задач слежения за изменяющимися объектами. Типичным примером таких задач являются операции непрерывного совмещения прицельного приспособления с движущимися сигналами.
Различают два вида слежения: слежение с преследованием и компенсирующее слежение. В первом случае оператор воспринимает весь ход изменений и должен сводить к нулю разностную ошибку входного и выходного сигналов. Во втором случае, решая ту же задачу, оператор воспринимает только разность между входным и выходным сигналами (величину ошибки). Точность слежения с преследованием в 1,5—2 раза выше, чем компенсирующего.
Наиболее простым случаем слежения является преследование визуального сигнала, изменяющегося равномерно по одному параметру. В этом случае легко вырабатывается экстраполяция движения, которая по своей точности определяется длительностью наблюдения и скоростью движения цели. Точность экстраполируемых движений особенно велика при возможности зрительного контроля.
Эксперименты показали, что человек, работающий в режиме слежения, обладает высоким уровнем самонастройки и саморегуляции, обеспечивающим большую активность процессов переработки информации сложного характера. По данным экспериментов при изменении характеристик цели относительное изменение пропускной способности высокотренированного человека достигает порядка 30 (линейные системы автоматического регулирования характеризуются показателем 0,5).
Более сложной задачей является прослеживание многомерного стимула. На начальном этапе решения таких задач действует «закон независимости», согласно которому вероятность точного слежения за многомерным стимулом равна произведению вероятностей точного слежения за каждым из его параметров. Однако в ходе решения задач и по мере тренировки субъект начинает отвечать на многомерный стимул единым координированным движением. Так, в процессе слежения за точкой, перемещающейся в плоскости (многомерный стимул), у человека формируется целостный образ ее движения, благодаря которому появляется возможность перехода от стратегии преследования к стратегии опережения, т. е. построения движения с учетом не только наличного, но и будущего положения цели [53].
Одним из важных условий точного слежения является мобильность руки, которая определяется и тренировкой оператора, и конструкцией органов управления. В частности, большое значение имеет расположение органов управления с таким расчетом, чтобы сократились количество и путь движений и требуемые усилия.
Вообще основные ошибки, допускаемые оператором в работе с органами управления любого класса, типа и вида, обусловлены тем, что конструкция пультов не обеспечивает оптимальных условий для регуляции действий в соответствии с задачей. Так, большинство ошибок пилота при управлении самолетом объясняется тем, что он смешивает органы управления, выполняет реверсивные движения и другие ошибки, связанные с трудностями различения органов управления и соотнесения их с показаниями индикаторов.
В этой связи возникает несколько специальных инженерно-психологических вопросов. Первый из них — это отношение органов управления к индикаторам, дающим необходимые для управления сведения. Исследования показали, что наиболее точными и быстрыми являются те движения, направление которых совпадает с направлением сигнала. Чем больше, например, направление движения рычага отклоняется от направления движения сигнала, тем больше ошибок допускает оператор. На основании полученных данных было сформулировано правило «реализма» в движениях органов управления. Согласно этому правилу наиболее высокая эффективность достигается при манипулировании теми органами управления, движения которых согласованы по пространственным и временным характеристикам с сигналами [44].
В ряде исследований изучалась эффективность действий оператора в зависимости от соотношения сигналов и органов управления по положению. Оказалось, что наилучшим вариантом является такой, при котором информация используется там, где она возникает, т. е. место приложения действия совпадает (или находится рядом) с местом появления сигнала. Например, исследовались три варианта сочетания табло, на котором отображалась схема железнодорожных путей, и пульта управления. В одном варианте пульт был отделен от табло, а тумблеры с соответствующими обозначениями располагались в ряд; во втором варианте пульт тоже был отделен от табло, но расположение тумблеров точно воспроизводило расположение стрелок на табло; в третьем варианте тумблеры располагались непосредственно на табло под стрелками. Испытуемым предлагались задачи перевода поездов из одного пункта в другой при условии занятости некоторых путей. Оказалось, что время решения задач в третьем варианте в три с лишним раза короче, чем в первом, и почти в полтора раза короче, чем во втором; в этом же случае допускалось наименьшее число ошибок.
При оформлении рабочего места операторов правило «реализма», или правило «совместимости индикаторов и органов управления», особенно важно соблюдать в тех случаях, когда требуется особо высокая скорость действий, а также, если оператору наряду с основной задачей часто приходится решать дополнительные задачи или в процессе выполнения задач управления возникают стрессовые ситуации, т. е. во всех случаях операционной и эмоциональной напряженности.
ГЛАВА XII
Дата добавления: 2015-12-10; просмотров: 4875;