Коническая винтовая линия.
Такую линию описывает точка, которая движется по какой-либо образующей прямого кругового конуса, вращающегося вокруг своей оси так, что путь пройденный точкой по образующей все время равен углу поворота конуса (рис.7.10).
| Проекция на ось конуса смещения точки вдоль образующей за один оборот называется шагом конической винтовой линии. Горизонтальной проекцией конической винтовой линии является спираль Архимеда - одна из замечательных плоских кривых линий. | 
|
| |
| а) модель | б) эпюр |
| Рисунок 7.10 Коническая винтовая линия |
Лекция №8 -1
Поверхность. Формообразование поверхностей. Поверхности вращения. Винтовые поверхности. Линейчатые поверхности с плоскостью параллелизма (Поверхности Каталана). Поверхности параллельного переноса.
| Поверхность |
"Поверхность, одно из основных геометрических понятий. При логическом уточнении этого понятия в разных отделах геометрии ему придаётся различный смысл.
1) В школьном курсе геометрии рассматриваются плоскости, многогранники, а также некоторые кривые поверхности. Каждая из кривых П. определяется специальным способом, чаще всего как множество точек, удовлетворяющих некоторым условиям. Например, поверхность шара - множество точек, отстоящих на заданном расстоянии от данной точки. Понятие "Поверхность" лишь поясняется, а не определяется. Например, говорят, что поверхность есть граница тела или след движущейся линии.
2) Математически строгое определение поверхности основывается на понятиях топологии. При этом основным является понятие простой поверхности, которую можно представить как кусок плоскости, подвергнутый непрерывным деформациям (растяжениям, сжатиям и изгибаниям). ..."
*Большая советская энциклопедия.
Поверхности составляют широкое многообразие нелинейных фигур трехмерного пространства. Инженерная деятельность человека связана непосредственно с конструированием, расчетом и, изготовлением различных поверхностей. Большинство задач прикладной геометрии сводится к автоматизации конструирования, расчета и воспроизведения сложных технических поверхностей. Способы формообразования и отображения поверхностей, начертательной геометрии составляют основу инструментальной базы трехмерного моделирования современных графических редакторов.
Рассматривая поверхности как непрерывное множество точек, между координатами которых может быть установлена зависимость, определяемая уравнением вида F(x,y,z)=0, можно выделить алгебраические поверхности (F(x,y,z)- многочлен n-ой степени) и трансцендентные (F(x,y,z)- трансцендентная функция).
Если алгебраическая поверхность описывается уравнением n-й степени, то поверхность считается поверхностью n-го порядка. Произвольно расположенная секущая плоскость пересекает поверхность по кривой того же порядка ( иногда распадающейся или мнимой), какой имеет исследуемая поверхность. Порядок поверхности может быть определен также числом точек ее пересечения с произвольной прямой, не принадлежащей целиком поверхности, считая все точки (действительные и мнимые).
В начертательной геометрии фигуры задаются графически, поэтому целесообразно поверхность рассматривать как совокупность всех последовательных положений некоторой перемещающейся в пространстве линии.
| образование и задание поверхности на чертеже. |
Поверхность можно рассматривать, как совокупность последовательных положений l1,l2… линии l, перемещающейся в пространстве по определенному закону (рис.8.1). В процессе образования поверхности линия l может оставаться неизменной или менять свою форму - изгибаться или деформироваться. Для наглядности изображения поверхности на эпюре Монжа закон перемещения линии l целесообразно задавать графически в одной линии или целого семейства линий (m, n, p...). Подвижную линию принято называть образующей, неподвижные - направляющими. Такой способ образования поверхности принято называть кинематическим.
| Примером такого способа могут служить все технологические процессы обработки металлов режущей кромкой, когда поверхность изделия несет на себе «отпечаток» режущей кромки резца, т.е. её поверхность можно рассматривать как множество, линий конгруэнтных профилю резца. По виду образующей различают поверхности линейчатые и нелинейчатые, образующая первых – прямая линия, вторых – кривая. Линейчатые поверхности в свою очередь разделяют на так называемые развертывающие, которые можно без складок и разрывов развернуть на плоскость и неразвертывающиеся. Значительный класс поверхностей формируется движением окружности постоянного или переменного радиуса. Это так называемые циклические поверхности (рис.8.2). Если же группировать поверхности по закону движения образующей линии и производящей поверхности, то большинство встречающихся в технике поверхностей можно разделить на: ·Поверхности вращения; ·Винтовые поверхности; ·Поверхности с плоскостью параллелизма; ·Поверхности переноса. Особое место занимают такие нелинейные поверхности, образование которых, не подчинено ни какому закону. Оптимальную форму таких поверхностей определяют теми физическими условиями, в которых они работают и устанавливают ее форму экспериментально (поверхности лопастей турбин, обшивка каркасов морских судов и самолетов). Множество линий, заполняющих поверхность так, что через каждую точку поверхности проходит в общем случае одна линия этого множества, называется каркасом поверхности. Поверхность может быть задана и конечным множеством точек, которое принято называть точечным каркасом. Проекции каркаса могут быть построены, если задан определитель поверхности – совокупность условий, задающих поверхность в пространстве и на чертеже. Различают две части определителя: геометрическую и алгоритмическую. Геометрическая часть определителя представляет собой набор постоянных геометрических элементов (точек, прямых, плоскостей и т.п.), которые могут и не входить в состав поверхности. Вторая часть – алгоритмическая (описательная) – содержит перечень операций, позволяющий реализовать переход от фигуры постоянных элементов к непрерывному каркасу. Например, циклическая поверхность, каркас которой состоит из окружностей (рис.8.3), может быть задан следующим образом: ·Геометрическая часть определителя: три направляющих l, m, n, ось iпучка плоскостей ·Алгоритмическая часть: выделяем из пучка плоскостей с осью iплоскость α; находим точки А, В, С, в которых αпересекает соответственно направляющие l, m, n. Строим окружность, определяемую тремя найденными точками. Переходим к следующей плоскости пучка и повторяем построение. |
| Рисунок 8.1. Поверхность, образованная движением линии | |
| |
| Рисунок 8.2. Циклическая поверхность | |
| |
| Рисунок 8.3. Образование циклической поверхности |
| // Поверхности вращения. |
Поверхности вращения – это поверхности созданные при вращении образующей mвокруг оси i (рис.8.4).
Геометрическая часть определителя состоит из двух линий: образующей m и оси i (рис 8.4.а).
Алгоритмическая часть включает две операции:
1. На образующей mвыделяют ряд точек A, B, C,…F;
2. Каждую точку вращают вокруг оси i.
| 
| |
| а) эпюр | б) модель | |
| Рисунок 8.4. Образование поверхности вращения | ||
| Так создается каркас поверхности, состоящей из множества окружностей (рис.8.5), плоскости которых расположены перпендикулярно оси i. Эти окружности называются параллелями; наименьшая параллель называется горлом, наибольшая – экватором. Из закона образования поверхности вращения вытекают два основных свойства: 1. Плоскость перпендикулярная оси вращения, пересекает поверхность по окружности – параллели. 2. Плоскость, проходящая через ось вращения, пересекает поверхность по двум симметричным относительно оси линиям – меридианам. Плоскость проходящая через ось параллельно фронтальной плоскости проекций называется плоскостью главного меридиана, а линия, полученная в сечении, – главным меридианом. |
| Рисунок 8.5 Поверхность вращения |
| 
|
| Рисунок 8.6. Образование сферы | Рисунок 8.7. Образование сфероида |
| Рассмотрим наиболее распространенные поверхности вращения с криволинейными образующими: Сфера – образуется вращением окружности вокруг её диаметра (рис.8.6). При сжатии или растяжении сферы она преобразуется в эллипсоиды, которые могут быть получены вращением эллипса вокруг одной из осей: если вращение вокруг большой оси то эллипсоид называется вытянутым (рис.8.8), если вокруг малой – сжатым или сфероидом (рис.8.7). Тор– поверхность тора формируется при вращении окружности вокруг оси, не проходящей через центр окружности (рис.8.9). Параболоид вращения– образуется при вращении параболы вокруг своей оси (рис.8.10). |
| Рисунок 8.8. Образование вытянутого эллипсоида |
| 
|
| Рисунок 8.8. Тор | Рисунок 8.10. Параболоид вращения |
| 
|
| а) однополостной | б) двуполостной |
| Рисунок 8.11. Гиперболоид вращения |
Гиперболоид вращения– различают одно (рис.8.11а) и двух (рис.8.11б) полостной гиперболоиды вращения. Первый получается при вращении вокруг мнимой оси, а второй – вращением гиперболы вокруг действительной оси.
| // Винтовые поверхности. |
Винтовые поверхности образуются винтовым движением некоторой линии – образующей.
Под винтовым движением понимается совокупность двух движений: поступательного параллельно некоторой оси, и вращательного, вокруг той же оси.
| При этом поступательное и угловое перемещение находятся в определенной зависимости ∆h=k∆v, где ∆h – линейное перемещение за время ∆t, ∆v– угловое перемещение за то же время, k – коэффициент пропорциональности. Если k=Const, то шаг поверхности постоянный. Геометрическая часть определителя винтовой поверхности ни чем не отличается от поверхности вращения и состоит из двух линий: образующей m, и оси i(рис.8.12). Алгоритмическая часть: 1. На образующей m выделяют ряд точек А, В, С, … 2. Строят винтовые линии заданного шага и направления, по которым перемещаются заданные точки. |
| Рисунок 8.12. Винтовая поверхность |
| Линейчатые поверхности с плоскостью параллелизма (поверхности каталана). |
| Поверхность с плоскостью параллелизма представляет собой множество прямых линий l (образующих), параллельных некоторой плоскости α (плоскости параллелизма) и пересекающих две данные направляющие m, n (рис. 8.13). В зависимости от формы направляющих образуются три частных вида поверхностей. Цилиндроид. Цилиндроидом называется поверхность, образованная движением прямолинейной образующей по двум направляющим кривым линиям, при этом образующая во всех положениях параллельна плоскости параллелизма (рис.8.13). Коноид.Коноидом называется поверхность, образованная движением прямолинейной образующей по двум направляющим, одна из которых кривая линия, а другая прямая, при этом образующая во всех положениях параллельна плоскости параллелизма (рис.8.14). |
| Рисунок 8.13. Цилиндроид |
Гиперболический параболоид. Гиперболическим параболоидом или косой плоскостью называется поверхность, образованная движением прямолинейной образующей, параллельной плоскости параллелизма, по двум направляющим линиям – скрещивающимся прямым (рис.8.15).
| 
|
| Рисунок 8.14. Коноид | Рисунок. 8.15. Гиперболический параболоид |
| Поверхности параллельного переноса. |
| Поверхностью параллельного переноса называется поверхность, образованная поступательным плоскопараллельным перемещением образующей - плоской кривой линии m по криволинейной направляющей n (рис.8.16). Геометрическая часть определителя состоит из двух кривых линий образующей - m и направляющей – n. Алгоритмическая часть определителя содержит перечень операций: 1. На направляющей п выбираем ряд точек А, В, С,… 2. Строим векторы АВ , ВС,… 3. Осуществляем параллельный перенос линии т по векторам АВ, ВС , … Наглядным примером плоскости параллельного переноса может служить скользящая опалубка, применяемая в строительстве. | |
| Рисунок 8.16. Поверхность параллельного переноса | ||
8.2 Задание поверхности на чертеже
Для изображения поверхности на чертеже необходимо выяснить проекции каких элементов поверхности необходимо задать для того, чтобы получитьобратимый чертеж. Поверхность считается заданной, если относительно любой точки (на чертеже), можно дать однозначный ответ на вопрос: «Принадлежит ли эта точка рассматриваемой поверхности?». Другими словами, если по одной проекции точки, принадлежащей поверхности, можно построить ее вторую проекцию.
Возможны два способа задания: аналитический и графический.При аналитическом задании, в общем случае, поверхность может быть определена уравнением в неявном виде F(x,y,z) = 0, в явном виде z =f(x,y), или параметрической форме x = X(u,v), y= Y(u,v), z = Z(u,v). Параметры u и v получили название криволинейных координат.
Графическое задание поверхностей также предусматривает несколько вариантов. Один из них непосредственно вытекает из аналитического способа.Табулирование уравнений, задающих поверхность, позволяет получить либо двухпараметрическое множество точек, либо два однопараметрических семейства линий. Эти семейства определяют, так называемый каркас поверхности (точечный или линейчатый). Изображение этих каркасов на чертеже позволяет говорить о каркасном задании поверхности (рисунок 8.2). 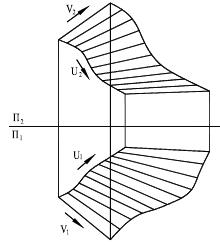
Рисунок 8.17 – Линейчатый каркас
Еще один, самый распространенный, графический способ — задание поверхности очерками. При проецировании произвольной поверхности на плоскость проекций
некоторые из проецирующих прямых будут касаться этой поверхности и обра-
зовывать некоторую проецирующую (цилиндрическую для параллельного про-
ецирования)поверхность Ω.
Линия касания этих поверхностей называется контурной линией, а ее
проекция на соответствующую плоскость очерком.
В соответствии с рисунком 8.3 поверхность прямого кругового конуса на
комплексном чертеже задана своими очерками (горизонтальным очерком Φ1 и,
соответственно, фронтальным Φ2). Очерки дают более наглядное представле-
ние об изображаемом объекте.
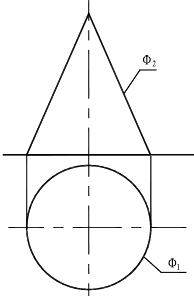
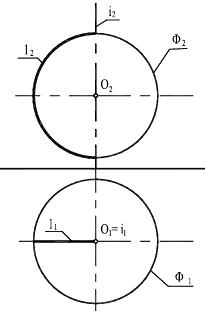
Рисунок 8.3 – Прямой круговой конус Рисунок 8.4 - Сфера
Пользуются при задании кинематических поверхностей и понятием оп-
ределителя. Под определителем кинематической поверхности понимают со-
вокупность независимых условий, однозначно определяющих эту поверхность.
Условиями могут быть: задание образующей поверхности, закон ее изменения
(в случае переменной образующей), закон движения образующей и др. Некото-
рые из них могут быть выражены графически. Например, сфера Ф может быть
представлена как поверхность вращения: Ф[i,l] (рисунок 8.4).
Условиями, включенными в определитель поверхности и определяющи-
ми ее форму, могут быть также параметры формы.
Одна и та же поверхность может быть образована несколькими способа-
ми. Поэтому она может иметь разные определители.
Все рассмотренные способы задания поверхности связаны между собой и
при решении многих задач приходится переходить от одного способа задания к
другому.
8.2 Точка и линия на поверхности
Обобщение определений на принадлежность точки и линии плоскости позволяет утверждать, что: точка лежит на поверхности, если она лежит на линии, лежащей наповерхности; линия лежит на поверхности в том случае, если все ее точки лежат наповерхности.
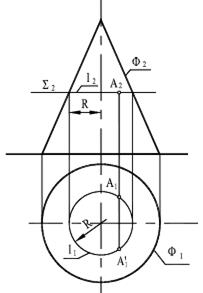
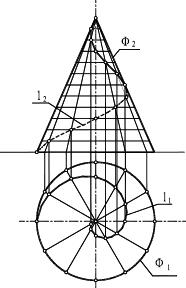
Рисунок 8.17 - Точка на конусе Рисунок 8.18 – Винтовая коническая линия
В соответствии с рисунком 8.17 и данным выше определением точка А лежит на поверхности конуса, заданного очерками Ф2 и Ф2. Точка А лежит наокружности l, полученной пересечением конической поверхности с горизонтальной плоскостью уровня Σ. Здесь одной фронтальной проекции точки А2 соответствуют две горизонтальные А1 и А’1. Рисунок 8.18 иллюстрирует винтовую линию l на поверхности конуса Ф,построенную по точкам. При построении точек, принадлежащих поверхностям, выбирают такие линии, лежащие на них, которые легко могут быть построены (прямые, окружности).
Дата добавления: 2015-10-26; просмотров: 4419;