САУ двигателем и подачей топлива ТРДД CF6-80C2
(версия с РМС)
Конструкция системы управления двигателем CF6-80C2очень похожа на систему управления двигателем CFM56-3. Основное отличие состоит в том, что блок МЕС системы управления двигателем CF6-80C2 дополнительно использует данные систем самолета и получает в качестве входного сигнала частоту вращения ротора низкого давления (N1). Расположение блоков МЕС и РМС на двигателе CF6-80C2 показано на рис. 36. В качестве статического давления на входе в двигатель в данном случае используется давление наружного воздуха (Р0) вместо давления (Ps12) (статическое давление перед вентилятором). Основные функции блоков МЕС и РМС такие же, как и на двигателе CFM56-3, отличие состоит в том, что на двигателе CF6-80C2 эти агрегаты выполнены более сложными: блок МЕС имеет регуляторы частот (N1) и (N2); в диапазоне частот МГ регулятор частоты (N2) управляет расходом топлива, а в диапазоне выше МГ расходом топлива управляет регулятор частоты (N1).
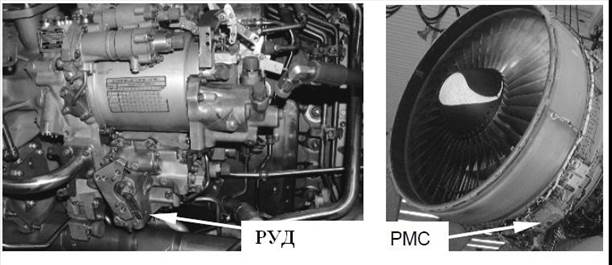
Рис. 36. На левом рисунке показан блок МЕС, расположенный на коробке приводов двигателя. На правом рисунке показан блок РМС, размещённый на корпусе вентилятора

Рис. 37. Входные сигналы, поступающие к блоку МЕС двигателя CF6-80C2
Блок МЕС способен управлять частотой (N1) как функцией угла установки РУД (TLA), но он работает с использованием поступающих к нему входных сигналов. Это ведет к небольшому отклонению от скорректированной частоты (N1) для выбранной тяги.
Блок РМС использует более точные данные от компьютера полетных данных (ADC – Air Data Computer), включая число Маха (М). Он способен рассчитать частоту (N1cmd) с высокой точностью. Все входные данные, используемые блоком РМС, показаны на рис. 38.
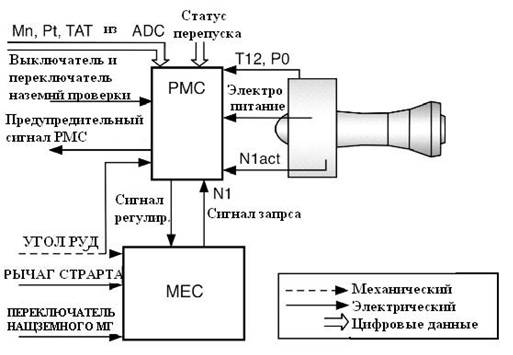
Рис. 38. Блок РМС двигателя CF6-80C2. В сравнении с РМС двигателя CFM56-3 данный блок РМС получает цифровые данные от самолета через шину данных
Цифровыми входными сигналами являются число Маха (М), полная температура воздуха и полное давление от ADC, а также режим отбора воздуха от соответствующего компьютера самолета. От МЕС РМС получает сигнал запроса частоты (N1) из встроенного преобразователя. Это командная частота (N1) от МЕС. РМС использует данные значения для расчета необходимых изменений в сигнал регулировки для МЕС. Имея данные о режиме отбора воздуха, блок РМС способен ограничить тягу на взлетном режиме для предотвращения превышения температуры (EGT) на работающем двигателе при работе системы отбора воздуха на взлете.
Дата добавления: 2015-10-26; просмотров: 1718;