Определение САУ (САР) АГТСУ, состав, назначение, основные требования
Каждый тип ГТД, как объект управления (ОУ), с точки зрения управления характеризуется:
· управляемыми параметрами (УП) – это основные параметры рабочего процесса (ПРП), для турбокомпрессорного контура (ТК) например: (n) или (Тг*);
· управляющими факторами (УФ) – например (Gт);
· программами управления (ПУ);
· потребной точностью поддержания заданных значений управляющих воздействий (УВ);
· статическими и динамическими свойствами (статические и динамические свойства выбранного типа ГТД зависят в свою очередь от режимов работы, высоты и скорости ЛА в совокупности характеризующих условия работы АГТСУ).
Режимы работы ГТД от минимального устойчивого до максимального задаются с помощью воздействий со стороны летчика или специальной системы автоматического управления (САУ), одним из звеньев которой может быть летчик. Частота и диапазон изменения управляющих факторов (УФ) для получения желаемой тяги ТРД (мощности для ТВД и вертолетных ГТД) определяется конкретным типом ЛА. Режим работы ГТД при управлении должен достаточно быстро изменяться в требуемом диапазоне.
Кроме воздействий со стороны летчика ГТД подвергаются влиянию различных возмущений.
Возмущения подразделяются:
- внешние возмущения, которые обусловлены изменением (H и V) полета, турбулентностью атмосферы. Их с некоторым приближением можно свести к изменению параметров заторможенного потока воздуха на входе в компрессор (К) – (p*1 и T*1) и (p*1/ pH) – определяющего степень понижения давления в сопле. Диапазон изменения указанных величин зависит от пределов изменения (H и V) полета ЛА.
P.S. В общем случае: - (p*1) может изменяться более чем в 100 раз;
- (T*1) – примерно в 3 раза.
- внутренние возмущения, которые связаны: с непосредственным непреднамеренным отклонением геометрии газовоздушного тракта (ГВТ) от номинальных размеров; с изменением механического КПД в подшипниках ротора и передачах, коэффициентов полноты сгорания топлива, характеристик магистралей системы топливоподачи и т.д.
Возмущающие воздействия (ВВ) являются случайными величинами (функциями времени) и во многом определяют структуру и параметры автоматических систем (АС) и систем топливоподачи.
При изменении (ВВ) режим работы ГТД поддерживается в соответствии с заданной (ПУ) воздействием на (УП) с помощью (УФ). Число (УФ) точно соответствует числу (УП). (УФ) характеризуют подвод энергии к рабочему телу в ГТД, преобразование и перераспределение подведенной энергии между элементами двигателя. Подвод энергии осуществляется воздействием на расход топлива (Gт ОКС) в основную камеру сгорания (ОКС) и на расход топлива (Gт ФКС) в форсажную камеру сгорания (ФКС).
Воздействие на количество подводимого воздуха, перераспределение энергии между элементами двигателя осуществляется изменением геометрии (ГВТ).
P.S. В соответствии с этим ГТД подразделяются на: двигатели с неизменяемой геометрией и двигатели с изменяемой геометрией.
Воздействие на значения (УФ) осуществляется с помощью управляющих органов (УО) – РУД и т.д., тип которых зависит от особенностей ГТД.
P.S. У ГТД с неизменяемой геометрией воздушного тракта (ГВТ) все сечения считаются неизменными, не зависящими ни от режима работы, ни от условий полета. (УФ) для них является (Gт).
У ГТД с изменяемой геометрией воздушного тракта (ГВТ) некоторые сечения тракта изменяются в зависимости от режима работы или при изменении условий полета. В этом случае кроме (Gт) появляются геометрические (УФ) – αНА и др., которые вместе с (Gт) определяют степени дросселирования ГТД. Применение геометрических (УФ) позволяет обеспечить лучшие эксплуатационные характеристики, но приводит к усложнению конструкции силовой установки (СУ) и ее АС.
Из вышесказанного делаем вывод:
Воздействие на параметры процесса, обеспечивающее требуемое его протекание (т.е. поддержание заданного режима) – называется управлением.
Объект (в данном случае ГТД), в котором осуществляется управление наз. объектом управления (ОУ), а параметры процесса, которые необходимо поддерживать постоянными или изменять по заданному закону наз. управляемыми параметрами (УП).
А физические величины, при помощи которых в процессе управления оказывается влияние на (УП) наз. управляющими факторами (УФ).
Совокупность средств управления и объекта образует систему управления, т.е.
| Система управления = ОУ + Средства управления |
А система управления, в которой все управляющие операции выполняются автоматическими управляющими устройствами (АУУ) – их еще наз. автоматическими регуляторами, называется автоматической системой (АС).
| АС = ОУ + АУУ |
В зависимости от исходных предпосылок, на основе которых вырабатывается (УФ) АС называются:
- системой автоматического регулирования (САР);
- системой автоматического управления (САУ).
P.S. Если (УФ) на объект формируется на основе заранее заданной (ПУ) системы управления (предусматривающей либо поддержание постоянства какого-либо параметра, либо изменение его по определенному закону) а настройка системы управления на оптимальный режим работы осуществляется только при участии человека (например: взлетный режим устанавливает летчик РУДом). – то эта разновидность управления наз. регулированием, а (АС) наз. (САР). При этом соответственно:
| САР = ОР + регулятор |
Отличие (САУ) от (САР) состоит в том, что в этих системах решается «задача верхнего уровня», заключающаяся в формировании (УФ) не на основе (ПУ), а на основе цели управления и имеющейся информации о ходе процесса (функции человека сводятся только к четкой постановки цели управления). Автоматическое управление возможно только с помощью мощной вычислительной техники.
 Рассмотрим состав САР (как частный случай САУ) на примере функциональной схемы АС замкнутого типа (рис. 2.), т.е. имеется обратная связь (ОС):
Рассмотрим состав САР (как частный случай САУ) на примере функциональной схемы АС замкнутого типа (рис. 2.), т.е. имеется обратная связь (ОС):
| f(t)-(ВВ) |
 g(t)-(ЗВ) g(t)-(ЗВ)
| автоматическое управляющее устройство – АУУ (регулятор) |   y(t)-(РФ) y(t)-(РФ)
| объект управления - ОУ (ОР) |  x(t)- (РП) x(t)- (РП)
|

датчик
  информации – (ОС) информации – (ОС)
|

Рис. 2. Функциональная схема АС замкнутого типа
Где: g(t) – входное задающее воздействие – ВЗВ (ЗВ);
y(t) – регулирующий фактор – (РФ);
f(t) – возмущающее воздействие – (ВВ);
x(t) – регулируемый параметр – (РП).
P.S. Благодаря наличию (ОС) АС сохраняет высокую точность и в тех случаях, когда (ВВ) изменяют свои значения со временем, при этом точность регулирования зависит в основном от точности, с которой осуществляется измерение и сравнение требуемого (заданного) и действительного значений регулируемого параметра (РП).
В свою очередь АУУ (регулятор) состоит из (рис. 4. и рис. 5.):
§ датчика (ЗУ + ЧЭ + СУ + ПУ);
§ сервомеханизма (УУ + РО + КУ);
§ элемента обратной связи (ОС).
g(t)
 (ЗВ) (ЗВ)
| датчик | ε(t)
 ошибка ошибка
| сервомеханизм | y(t)
 (РФ) (РФ)
| объект регулирования (ОР) | x(t)
  (РП) (РП)
|

обратная
  связь (ОС) связь (ОС)
|
Рис. 3. Функциональные элементы САР
g(t)
 (ЗВ)
(ЗВ)
| ЗУ | 
|
 СУ СУ
| ε(t)

| ПУ | 
| УУ |
| РО | y(t)
 (РФ)
(РФ)
| ОР | x(t)
 (РП)
(РП)
|




 ЧЭ ЧЭ
|
 КУ КУ
|

     ОС ОС
| ||
 датчик датчик
| ||
| сервомеханизм |
Рис. 4. Основные устройства и функциональная схема типовой САР
Где: ЗУ – задающее устройство – это устройство, при помощи которого можно изменять заданную величину регулируемого параметра, онопреобразует g(t)-(ЗВ) в управляющий сигнал, пропорциональный заданному значению регулируемого параметра x(t)-(РП) - например: пружины, калиброванные сопротивления, уровни и т.д.;
ЧЭ – чувствительный элемент (измерительное устройство) измеряет действительное значение x(t)-(РП) и преобразуют их в сигнал регулирования иной физической природы (чаще всего в пропорциональные механические перемещения или электрические сигналы);
СУ – сравнивающее устройство сопоставляет действительное значение x(t)-(РП) с его заданным значением и вырабатывает сигнал ошибки ε(t) (обычно это арифметическое устройство);
ПУ – преобразующее устройство преобразует ε(t) из одной физической величины в другую, более удобную в системе регулирования;
РО – регулирующий орган (исполнительное устройство) вырабатывает y(t)-(РФ) воздействующий на (ОР) (в авиационных АС – это дозирующий кран (ДК), механизмы управления элеронами и рулями ЛА);
УУ – усилительное устройство предназначено для усиления мощности сигнала ошибки ε(t) с использованием постороннего источника энергии (в авиационных АС – широко используются гидравлические, электронные и электромагнитные усилители);
КУ – корректирующее устройство предназначено для изменения свойств АУУ (регулятора) в нужном направлении в основном для повышения устойчивости и улучшения динамических свойств системы;
ОС – элемент обратной связи вырабатывает сигнал, находящийся в определенной функциональной зависимости от регулируемого параметра x(t)-(РП) и передает его на (ЧЭ) датчика.
P.S. Конкретные САР могут отличаться от типовой схемы, приведенной на рисунках. Часть устройств может отсутствовать или конструктивно объединена в одном устройстве. В состав системы могут входить и другие элементы, не показанные на рисунках.
Для примера покажем укрупненную функциональную схему системы управления АГТСУ современного ЛА с ТРДДФ (рис. 5.).
| Рис. 5. Укрупненная функциональная схема системы управления силовой установкой современного летательного аппарата с ТРДФ |
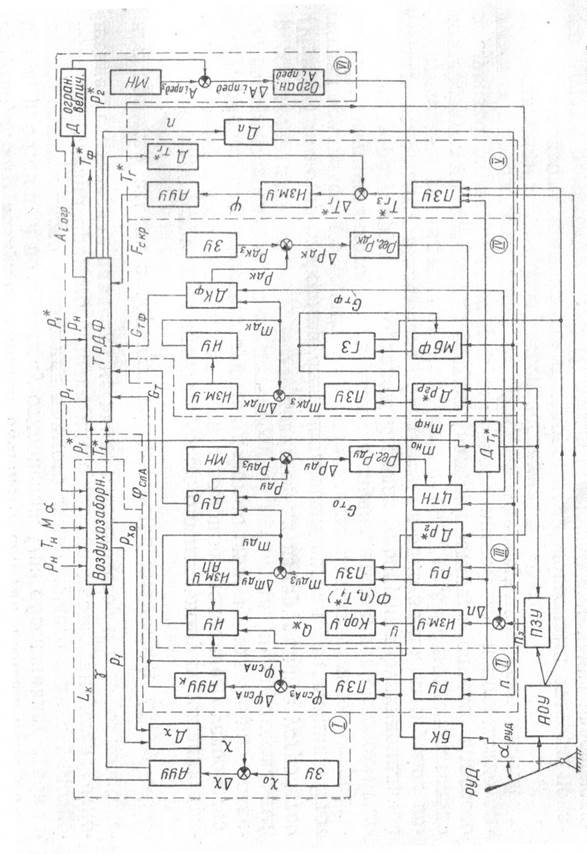
На рис.5. приведена в качестве примера упрощенная функциональная схема АС силовой установки (СУ) современного летательного аппарата с ТРДФ, предназначенного для широкого диапазона скоростей и высот полета. Она дает представление о составных частях АС и знакомит с сокращенными обозначениями основных звеньев, применяемыми в дальнейшем при изображении функциональных схем АС.
АС силовой установки (рис. 5) включает в себя шесть связанных между собой и через управляемый объект контуров управления АС:
1). АС сверхзвукового воздухозаборника внешнего сжатия (I) выполнена замкнутой, работающей по принципу отклонения. Она обеспечивает стабилизацию оптимального положения прямого замыкающего скачка уплотнения. Положение прямого замыкающего скачка характеризуется отношением статических давлений на входе в компрессор и в точке пересечения прямого скачка с образующей цилиндра диметром (Dвх):
| א = p1/px |
Значение параметра (א о), соответствующее оптимальному положению прямого скачка, задается с помощью задающего устройства (ЗУ). Значение (א), соответствующее действительному положению скачка, измеряется специальным датчиком (Д א). Сигнал, пропорциональный рассогласованию (∆א = א о ─ א), подается на измерительное устройство (Изм. У), в котором формируется первичный сигнал управления. Этот сигнал усиливается в усилителе (УУ) и подается на исполнительное устройство (ИУ), функции которого, в частном случае, выполняет силовой гидроцилиндр регулирующих органов. В целях упрощения функциональной схемы последние три элемента объединены в одно звено, именуемое автоматическим управляющим устройством (АУУ). АУУ последовательно воздействует на положение конуса (панелей клина, в случае плоского воздухозаборника), характеризуемое координатой (Lк) и положением выпускных противопомпажных створок, характеризуемое координатой (γ), до ликвидации возникшего рассогласования.
2). Для осевого компрессора с поворотными лопатками статора показана схема разомкнутой АС (II), обеспечивающей изменение углов установки поворотных лопаток по заданной программе в функции приведенной частоты вращения ротора (nпр). Сигнал, пропорциональный (nпр), вырабатывается специальным решающим устройством (РУ) и поступает на программное задающее устройство (ПЗУ), формирующее закон изменения:
| φ Л СТ З = φ Л СТ З(nпр) |
При возникновении рассогласования ∆ φ Л СТ между заданным и действительным положением лопаток АУУ изменяет угол установки лопаток до ликвидации рассогласования.
В целях предотвращения возможности помпажа компрессора при применении бортового оружия на ПЗУ подается сигнал коррекции программы от боевой кнопки (БК). Одновременно тот же сигнал подается к ИУ АС частоты вращения ротора для сброса топлива и к ПЗУ АС температуры газа – на раскрытие сопла.
3). Контур регулирования подачи топлива в основную камеру сгорания (III) включает в себя АС частоты вращения ротора, автоматы запуска и приемистости.
АС частоты вращения ротора является замкнутой, работающей по принципу отклонения управляемой величины от заданного значения. ПЗУ формирует сигнал, пропорциональный заданному значению частоты вращения в функции перемещения РУД и температуры воздуха (Т1*). Этот сигнал сравнивается с сигналом, пропорциональным действительному значению (n), поступающим от датчика (Дn). Сигнал рассогласования (∆n) поступает в измерительное устройство (Изм. У), которое формирует первичный сигнал управления. Этот сигнал корректируется в корректирующем устройстве (КУ) с целью улучшения качества переходных процессов, усиливается и поступает на ИУ. ИУ управляет дозирующим устройством основного контура (ДУОК), определяющим расход топлива и частоту вращения ротора ТРДФ.
На ДУОК поддерживается постоянным перепад давлений топлива с помощью регулятора перепада (∆pДУ = const), воздействующего на регулирующий орган приводного топливного насоса. Положение регулирующего органа на схеме обозначено координатой (mн о).
Регулирование подачи топлива в процессе запуска и разгона двигателя осуществляется автоматом приемистости (АП), реализующим оптимальную во всех условиях эксплуатации программу:
| GT P = GT P {p2* Ф(n, Т1*)} |
в функции комплекса параметров. Для формирования этого закона в АС имеются датчики давления воздуха за компрессором (Др2*), температуры (ДТ1*) и частоты вращения (Дn). Сигналы от датчиков (ДТ1*) и (Дn) поступают в решающее устройство (РУ), которое формирует сигнал Ф(n, Т1*). Этот сигнал вместе с сигналом от датчика (Др2*) подается на ПЗУ, которое формирует управляющий сигнал на дозирующее устройство системы топливоподачи, пропорциональный заданному значению координаты (mДУ З). На суммирующем устройстве появляется сигнал рассогласования, который поступает на Изм. У и после усиления – на ИУ.
4). АС температуры газа в форсажной камере Тф* (IV) является разомкнутой, реализующей программу изменения подачи топлива:
| GT ФКС = GT ФКС (αРУД, p2* , Т1*) |
| GT ФКС/ p2* = f (Т1*) |
из условия получения желаемого закона изменения температуры (Тф*). При αРУД = const:
Управление форсажными режимами осуществляется с помощью РУД, перемещением, которого задается величина (GT ФКС/ p2*).
Сигналы от датчика давления воздуха (p2*p), который корректируется по температуре (Т1*) с целью увеличения степени форсирования ТРДФ на больших числах (М) полета, и РУД поступают в ПЗУ. ПЗУ формирует программу изменения положения дозирующего крана (ДКФ), на котором поддерживается постоянным перепад давлений топлива с той же целью, что и в основном контуре.
Для получения приемлемых характеристик переходных процессов при управляющих воздействиях (УВ) между РУД и ПЗУ включен гидрозамедлитель (ГЗ), определяющий темп перенастройки АС при быстром перемещении РУД. Включение форсажа может произойти только при прохождении сигналов по (αРУД) и частоте вращения через механизм блокировки включения форсажа (МБФ). После запуска форсажной камеры блокировка снимается по сигналу от ГЗ.
5). Регулирование температуры газа ТГ* (перед или за турбиной) осуществляется замкнутой АС (V), воздействующей на площадь критического сечения сопла. Желаемый закон изменения (ТГ*) задается с помощью ПЗУ в функции (αРУД) и (Т1*). Обычно это ПЗУ выполняется электрическим. Электрический сигнал, пропорциональный (ТГ*З), сравнивается с электрическим сигналом, пропорциональным действительному значению (ТГ*), измеряемой блоком термопар, устанавливаемых в соответствующем сечении газового тракта. Сигнал рассогласования, преобразованный и усиленный в Изм. У, поступает на Исп.У, воздействующее на створки сопла.
6). Ограничение предельного значения неуправляемых величин осуществляется замкнутой АС (VI), воздействующей на (Исп. У) АС частоты вращения ротора в направлении уменьшения подачи топлива (GT).
В связи со сложностью реализуемых каждой АС программ управления и необходимостью оптимального согласования их при управлении двигателем с помощью РУД или комплексной АС предусматривается агрегат объединенного управления (АОУ), обеспечивающий согласование настройки различных АУУ (регуляторов).
Системы автоматического управления (САУ) современных силовых установок (СУ) решают сложные многообразные задачи по управлению процессами, протекающими в СУ. Основными из этих задач являются следующие:
- реализацию выбранных программ управления (регулирования) с требуемой точностью и приемлемым качеством переходных процессов во всем диапазоне изменения условий полета;
- защиту конструкции от механических и тепловых перегрузок;
- обеспечение запуска пускового устройства и двигателя в любых условиях эксплуатации, выхода на заданный режим за минимальное время и возможности быстрого останова;
- обеспечение приемлемых разгонных характеристик двигателя;
- обеспечение устойчивых режимов работы элементов СУ;
- ограничение предельных параметров режима работы СУ и параметров АС;
- обеспечение различных блокировок;
- переключение с основных АС на резервные в целях обеспечения безопасности полетов при отказе основных АС.
Каждая САУ (САР) должна удовлетворять следующим основным требованиям:
· обеспечение возможности работы двигателя на всех режимах его эксплуатации;
· обеспечение необходимого качества регулирования по основным параметрам рабочего процесса;
· выдерживание оптимальных параметров рабочего процесса, при которых получаются приемлемые удельные характеристики;
· защита двигателя от недопустимых рабочих режимов;
· обеспечение требуемой надежности двигателя и согласование характеристик двигателя с характеристиками летательного аппарата.
Эти требования, хотя и противоречивые, должны быть удовлетворены комплексно.
Дата добавления: 2015-10-26; просмотров: 2729;