Объемное регулирование
Для изменения скорости рабочих органов применяют системы, у которых вся жидкость от насосов поступает кгидродвигателю, а регулирование его скорости достигается изменением рабочего объема насоса или гидродвигателя.
Ступенчатой регулирование, являясь разновидностью объемного, обычно осуществляется или путем подключения в систему различных по производительности насосов (различных по расходу гидродвигателей).
Изменение скорости перемещения поршня гидроцилиндра (рис.9.3) осуществляется в результате соединения одного или нескольких насосов 1 с линией слива (при помощи кранов 2). Обратные клапаны 3 в системе отключают разгруженный насосот линии высокого давления.

Рис.9.3. Объемное ступенчатое регулирование
Подключение в гидросистему трех насосов разной производительности Q1, Q2 и Q3 позволяет получать до семи значений скоростей движения выходного звена гидродвигателя.
Плавное изменение скорости движения выходного звена гидропривода реализуется за счет изменения рабочего объема либонасоса, либо двигателя, либо за счет изменения рабочего объема обеих машин.
Регулирование путем изменения рабочего объема насоса может быть использовано в гидроприводах поступательного, поворотного или вращательного движений.
На рис.9.4, а приведена принципиальная схема гидропривода поступательного движения с замкнутой циркуляцией, в котором регулирование скорости движения штока гидроцилиндра 1 осуществляется за счет изменения подачи насоса 4. Выражение для скорости движения штока при FH /S < Pк записывается в виде
где qН - максимальный рабочий объем насоса; nН - частота вращения насоса; S - эффективная площадь поршня гидроцилиндра; rс - коэффициент объемных потерь системы, определяемый изменением объемного КПД насоса игидродвигателя в функции давления (нагрузки); FН - нагрузка на шток поршня; Pк - давление, на которое отрегулированы предохранительные клапаны; eН - параметр регулирования насоса, равный отношению текущего значения рабочего объема к максимальному рабочему объему.
Изменение направления движения выходного звена гидропривода осуществляется благодаря реверсированию потока рабочейжидкости, подаваемой насосом (реверс подачи насоса). При этом необходимо вначале уменьшить подачу насоса до нуля, а затем увеличить ее, но в противоположном направлении. Напорная и сливная гидролинии меняются местами. Для компенсации утечек в гидроприводе с замкнутой циркуляцией, а также для исключения возможности кавитации на входе внасос используется вспомогательный насос 3, осуществляющий подачу рабочей жидкости в систему гидропривода через обратные клапаны 5.
При таком способе регулирования скорости усилие, развиваемое выходным звеном гидропривода, не зависит от скорости движения. В этом случае диапазон регулирования определяется объемным КПД гидропривода, а также максимальной подачей насоса, определяемый его рабочим объемом.
На рис.9.4, б представлена зависимость скорости движения и мощности на выходном звене гидропривода от параметра регулирования при постоянной нагрузке. Такая система объемного регулирования скорости получила наибольшее распространение в гидроприводах дорожно-строительных и подъемно-транспортных машин.
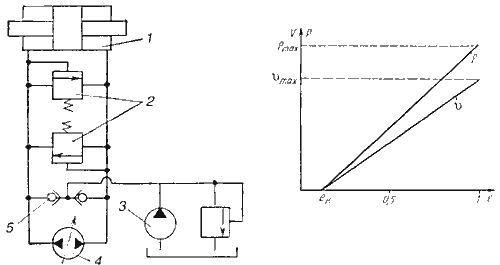
Рис.9.4. Гидропривод с регулируемым насосом:
а - принципиальная схема; б - зависимость скорости и давления
от параметра регулирования; 1 - гидроцилиндр; 2 - предохранительный клапан;
3 - вспомогательный насос; 4 - регулируемый насос; 5 - обратный клапан
Регулирование путем изменения рабочего объема гидродвигателя применяется только в гидроприводах вращательного движения, где в качестве гидродвигателя используется регулируемый гидромотор (рис.9.5, а). В этом случае регулирование происходит при постоянной мощности, так как уменьшение рабочего объема гидродвигателя увеличивает скорость выходного звена гидропривода и соответственно уменьшает крутящий момент, развиваемый на выходном звене. Частота вращения вала гидромотора nМ при P1 < Pк определяется соотношением
где qМ max - максимальный рабочий объем гидромотора; eМ - параметр регулирования гидромотора; P1 - давление в напорнойгидролинии; rс - коэффициент объемных потерь (утечек) в системе.
Из выражения (9.5) следует, что при eМ → 0 nМ возрастает до бесконечности. Практически существует минимальное значение e'M, при котором момент, развиваемый гидромотором, становится равным моменту внутреннего трения, и гидромотор тормозится даже при моменте нагрузки, равном нулю (P1 = 0).
На рис.9.5, б представлена зависимость частоты вращения и развиваемого момента на валу гидромотора от параметра регулирования при постоянном давлении P1.
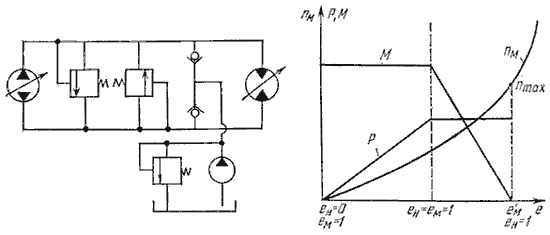
Рис.9.5. Гидропривод с регулируемым гидромотором: а - принципиальная схема; б - зависимость скорости и давления от параметра регулирования
Регулирование путем изменения рабочих объемов насоса и гидродвигателя используют только в гидроприводах вращательного движения с регулируемым гидромотором. Скорость выходного звена рационально регулировать следующим образом:
1)запустить приводной двигатель при eН = 0;
2) для страгивания и разгона выходного звена привода изменить eН от 0 до 1 при eМ = 1;
3) дальнейшее увеличение скорости осуществлять путем изменения eМ от 1 до e'M при eН = 1.
Уменьшение скорости происходит в обратном порядке. Такой способ позволяет получить большой диапазон регулирования, он обладает всеми достоинствами и недостатками выше рассмотренных схем объемного управления.
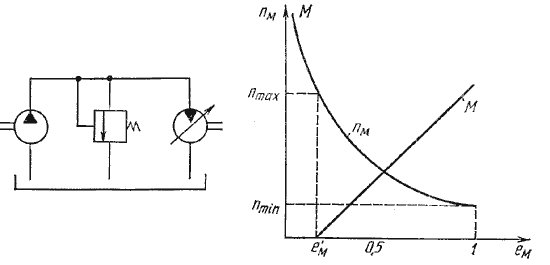
Рис.9.6. Гидропривод с регулируемым насосом и гидромотором
На рис.9.6 представлены принципиальная схема (а) и характеристика (б) гидропривода с замкнутой циркуляцией и регулируемым насосом и гидромотором.
Дата добавления: 2015-10-19; просмотров: 819;